Анализ показателей качества САУ с нелинейным аппроксимирующим законом управления
Ключевые слова: АППРОКСИМАЦИЯ НЕЛИНЕЙНОСТЕЙ, ЗАКОН УПРАВЛЕНИЯ, ПОКАЗАТЕЛИ КАЧЕСТВА, ОБЪЕКТ УПРАВЛЕНИЯ, ПРОЦЕСС ФЕРМЕНТАЦИИ
Анализ показателей качества САУ с нелинейным аппроксимирующим законом управления
Повышение эффективности управления объектами в переходных и установившихся режимах является актуальной проблемой, стоящей перед проектировщиками систем автоматического управления (САУ) в различных областях техники и технологии. Это в полной мере относится к таким областям, как биотехнология и АПК, где производства получаемой биологической продукции, удобрений и других химических препаратов выдвигают необходимость разработки новой методологии применения нелинейного управления технологическими объектами в условиях многорежимности их функционирования.
В работе [2], отмечено, что "... с некоторого уровня сложности задачи "хороший" регулятор обязательно будет нелинейным". Однако, используемые в ряде работ на практике нелинейные законы управления являются разрывными, т. е. находятся на ограничениях. В связи с этим замкнутые системы являются неустойчивыми в малом. Кроме того, физические величины и исполнительные устройства не могут изменяться с бесконечной скоростью при управлении биотехнологическими объектами (БТО).
Одним из альтернативных методов построения нелинейных систем с релейными (разрывными) управлениями объектами является использование метода аппроксимирующего управления [3, 4, 5]. Существуют различные способы аппроксимации [1, 6], а также известны результаты использования аппроксимации релейных функций на основе гиперболического и сигмоидального тангенса, применяемого в нейронных сетях [7], или нелинейной дробно-радикальной функции, предложенной профессором Р. А. Нейдорфом [8]. Однако аппроксимация релейных управлений, например, функциями гиперболического тангенса, как предложено в работе [7], дает значительную колебательность замкнутой системы в области малых отклонений. Подобные варианты аппроксимаций не рассматривались в целях применения их в задачах управления многорежимными объектами. При решении задачи синтеза нелинейных САУ, не всегда целесообразно использовать кусочно-линейную аппроксимацию [9]. Окончательный выбор аппроксимирующей функции зависит от решаемой задачи и может быть осуществлен на основе анализа показателей качества переходных процессов в системе управления объектом.
Показатели качества переходных процессов, с одной стороны, зависят от параметров принятой аппроксимирующей функции, а с другой стороны, сложность синтеза системы с использованием аппроксимирующей функции непосредственно зависит от вида аналитической функции, аппроксимирующей характеристику одного либо нескольких нелинейных элементов закона управления. Решение задачи синтеза САУ, содержащих различного типа нелинейные элементы, на основе метода аппроксимирующих преобразований является универсальным в том смысле, что не ограничивает семейство нелинейных характеристик лишь сигмоидными или теми характеристиками нелинейных элементов, которые допускают аппроксимацию двойной логистической (сигмоидальной) кривой, имеющих гладкие нелинейные характеристики. Это безусловно является весьма ценным, поскольку универсального способа аппроксимации нелинейных характеристик реальных элементов систем управления не существует.
В данной работе проводится анализ параметров нелинейного закона управления, полученного аппроксимацией релейного элемента с зоной нечувствительности (ЗН) и с ограничением непрерывной нелинейной сигмоидной функцией следующего вида [10]:

(1)
Где U(?) - регулирующее воздействие; М1, М2 - величина регулирующего воздействия в ЗН и за ее пределами соответственно; ? - ошибка регулирования; ? - параметр наклона аппроксимирующей функции; 2а - величина ЗН.
Можно отметить, что преимущество данного способа аппроксимации нелинейностей для САУ многорежимными объектами исключает необходимость определения точек переключения нелинейных характеристик при работе алгоритма управления с несколькими участками аппроксимации нелинейностей.
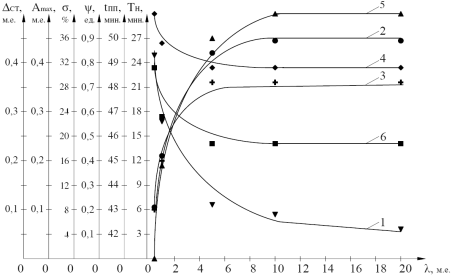
Учитывая неоднозначность влияния настроечных коэффициентов аппроксимирующей нелинейной функции АНФ-регулятора на показатели качества переходных процессов в САУ, в данной работе исследовано влияние параметров закона управления (1) на показатели качества переходных процессов в системе управления многорежимными промышленными биотехнологическими объектами (БТО). Поскольку характер переходного процесса в условиях неопределенности и нестационарности параметров БТО может меняться от апериодического до колебательного, проведена оценка показателей качества переходных процессов при различных значениях М1, М2 и ?, полученных в системе регулирования температуры в ферментаторе периодического действия на участке режима охлаждения среды в ферментаторе с моделью объекта, характеризующегося отсутствием самовыравнивания, в виде уравнения 4d2у(t)/dt2+dу(t)/dt = 0,05U(t-6) (кривая Х1 (t)) и для режима с тепловыделением с моделью объекта в виде уравнения 73,08 d2x(t)/dt2+14,35 dx(t)/dt+x(t)=0,383U(t-6) (кривая Х2(t)). На основе полученных переходных процессов получены зависимости для показателей качества, представленные на рисунке 1.
Автоматический регулирование управление нелинейный
- А) Б)
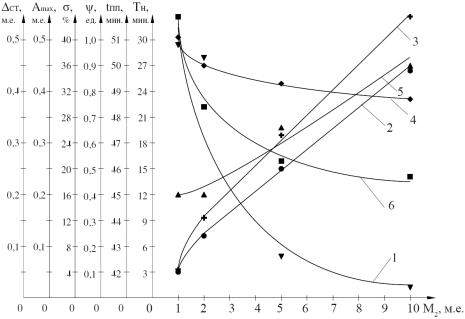
Рисунок 1 - Зависимости показателей качества переходных процессов в системе с АНФ регулятором при ? = 50 и различных значениях М1 и М2 (а) и при М1 =5, М2:=10 и различных значениях ? (б): 1- время нарастания (Тн); 2 - максимальное динамическое отклонение (Аmax); 3 - перерегулирование (?); 4 - степень затухания (?); 5 - время переходного процесса (tпп); 6 - статическая ошибка (?)
Из полученных результатов следует, что установить однозначную зависимость между настроечными параметрами ?, М1 и М2 и показателями качества переходных процессов затруднительно.
В то же время при попарном сравнении показателей качества можно указать рациональные значения ?, М1 и М2, обеспечивающие одновременное улучшение показателей качества переходных процессов. Так, например, при ? = 1,0 время нарастания переходного процесса равно 17,2 мин, что незначительно, всего в 1,2 раза превышает минимальное, а перерегулирование равно 16 %, что в 1,8 раза меньше полученного максимального и не превышает 18-25 %-ного перерегулирования, часто рекомендуемого для промышленных систем.
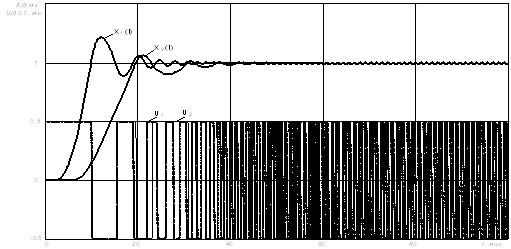
Если же не ограничиваться только апериодическими переходными процессами, а считать приемлемыми и колебательные переходные процессы, протекающие в некоторой области, ограниченной допустимыми показателями качества, то в этом случае имеется некоторый рациональный диапазон возможных значений М1 и М2. В частности, анализ показателей качества переходных процессов, полученных при постоянном значении ? и вариации значений М1 и М2, показал, что снизить автоколебания в установившемся режиме при квазирелейном управлении и при аппроксимирующем управлении можно за счет уменьшения М1. Переходные процессы в системе управления с двумя релейными элементами при равных значениях М1 = М2 = М представлены на рисунке 2. Для уменьшения амплитуды автоколебаний в установившемся режиме значение М1 уменьшено в 2 раза. Переходные процессы в системе управления с двумя релейными характеристиками представлены на рисунке 2,б. Как видно из полученных кривых переходного процесса, автоколебания для астатической системы сохраняются, а в статической системе имеет место остаточное отклонение. При этом сохраняется разрывной характер управляющего воздействия на объект для обеих систем.
- А) Б)
Рисунок 2 - Переходные процессы в астатической (Х1(t)) и статической (Х2(t)) системе с релейным управлением при значениях М1 = М2 = 5,0 (а) и при значении М1 = 2,5; М2 = 5,0
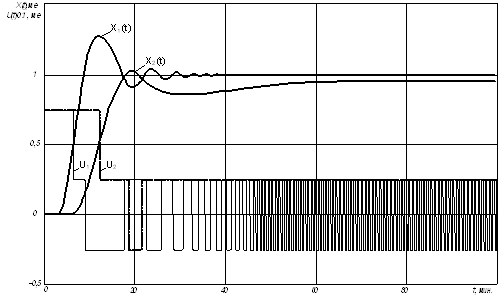
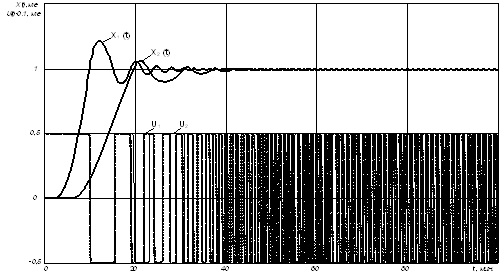
Для уменьшения автоколебаний и плавного управления воспользуемся аппроксимирующей зависимостью управления (1). На рисунке 3,а приведены переходные процессы в нелинейной системе при значениях параметров М1 = 2,5; М2 = 5,0. Как видно, колебательность в переходном процессе Х1(t) уменьшилась, переходный процесс Х2(t) приближен к апериодическому, характер управляющего воздействия - плавный и характеризуется колебательностью с сохранением статической ошибки. Увеличение значения М в 2 раза, как видно из рисунка 3,б, обеспечивает незначительное уменьшение статической ошибки, увеличивая колебательность регулируемой переменной и управляющего сигнала. Переходный процесс колебательный и характеризуется выходом управляющего воздействия на предельные значения только в начале переходного процесса.
Результаты исследования зависимостей показателей качества переходных процессов от параметров ? и М АНФ-регулятора позволяют обосновать их коррекцию для разных режимов объекта. Так, например изменение угла наклона ? линейной части линии управления определяет близость к релейной характеристике, характер аппроксимации в зоне нечувствительности и влияет на помехозащищенность системы. Значение параметра М определяет скорость выхода на режим, точность и колебания в установившемся режиме. Поскольку сочетание преимуществ колебательного переходного процесса, обеспечивающего первоначальный быстрый выход в установившийся режим, с плавностью перехода к установившемуся режиму, свойственное апериодическому процессу, необходимо для качественного управления многорежимным БТО, то в качестве корректируемых параметров АНФ-регулятора следует выбирать параметры ? при М1 и М2 = const либо М1 и М2 при ? = const в зависимости от режима функционирования системы и характера внешних возмущений (помех).
- А) Б)
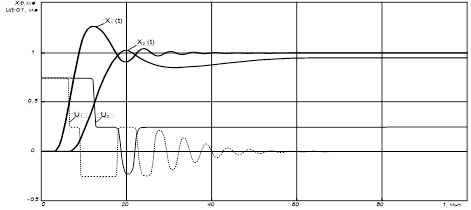
Рисунок 3 - Переходные процессы в астатической (Х1(t)) и статической (Х2(t)) системе с АНФ-регулятором при значениях М1 = 0,5М; М2 = М; М = 5; ?=50; а=0,5 (а) и значениях М1 = 0,5М; М2 = М; М = 10; ?=50; а=0,5
Полученные в работе результаты подтверждают, что предлагаемый метод аппроксимирующих преобразований на основе комбинации сигмоидных функций, обеспечивающих гладкие нелинейные характеристики, целесообразно использовать при синтезе нелинейных законов управления, аппроксимирующих релейные с зоной и без зоны нечувствительности, многопозиционные, с насыщением и без насыщения.
Синтез параметров закона управления для нелинейных САУ при различных видах аппроксимации характеристик позволяет на практике учесть особенности решаемой задачи регулирования и управления: режимы стабилизации и переходные. Использование различных видов нелинейностей при аппроксимации обеспечивает линейные зависимости в установившихся и близких к ним режимах и в сочетании с релейными в переходных режимах является положительным фактором улучшения качества регулирования в многорежимных системах управления. Анализ показателей качества управления при вариации параметров закона управления является важным этапом при выборе аппроксимирующей функции для синтеза нелинейного управления и улучшения качества.
ЛИТЕРАТУРА
- 1. Емельянов, С. В. Новые типы обратной связи: управление при неопределенности / С. В. Емельянов, С. К. Коровин // М.: Наука. Физматлит, 1997. - 352 с. 2. Лубенцова, Е. В. Метод аппроксимирующих преобразований в решении задач управления и моделирования биосистем / Лубенцова Е. В., А. А. Володин // Информационные системы и технологии. - 2013. - № 4 (78). - С. 26-35. 3. Лубенцова, Е. В. Синтез систем автоматического управления биотехнологическими процессами с применением методов аппроксимирующего и нейро-нечеткого управления: монография / Е. В. Лубенцова, А. А Володин. - Ставрополь: Изд-во СКФУ, 2014. - 160 с. 4. Лубенцова, Е. В. Метод синтеза нелинейных систем с аппроксимирующими законами управления / Е. В. Лубенцова, В. Ф. Лубенцов // Вестник СКФУ. Ставрополь: Изд-во СКФУ. - 2015. - № 6 (51). - С.14-21. 5. Медведев, М. Ю. Аналитический синтез управлений нелинейными многосвязными объектами в условиях неопределенности / М. Ю. Медведев // Таганрог: Изд-во ТТИ ЮФУ, 2010. - 402 с. 6. Медведев, М. Ю. Управление нелинейными многосвязными объектами в условиях неопределенности: автореф. дис. ... д-ра техн. наук / Михаил Юрьевич Медведев. - Таганрог, 2010. - 32 с. 7. Нейдорф, Р. А. Нелинейная организация асимптотически устойчивых квазиоптимальных по быстродействию движений / Р. А. Нейдорф Сб. докл. Всерос. науч. конф. 3-4 апр. 2003 г. "Управление и информационные технологии". СПб., 2003. Т.1. - С.189-194. 8. Шишлаков, В. Ф. Синтез параметров закона управления для нелинейных САУ при различных видах аппроксимации характеристик / В. Ф. Шишлаков, Е. В. Анисимова,., А. В. Шишлаков, Д. В. Шишлаков // Изв. вузов. Приборостроение. 2015. Т. 58, № 9. - С. 701--706. 9. Шимигон, А. С. Регулятор с зоной нечувствительности на основе аппроксимирующих функций / А. С. Шимигон, Е. В. Лубенцова // Информационные технологии, системный анализ и управление - ИТСАиУ-2012. Сб. трудов Х Всероссийской научной конференции молодых ученых, аспирантов и студентов. Т.2. - Таганрог: Изд-во ЮФУ, 2012. - С. 233-237.
Похожие статьи
-
Используя цифровой регулятор, построенный методом переменных коэффициентов время переходного процесса составляет tПп ? 5,9 сек. при установлении...
-
Современные потребители электроэнергии при всей своей технологической эффективности часто отрицательно влияют на качество электроэнергии. Ухудшение...
-
Показатели разгона автомобиля представляют собой графики ускорений, времени и пути разгона в функции скорости. Ускорение j для разных передач и скоростей...
-
Сами элементы, на которых строятся активные фильтры, подвержены изменениям вследствие перемен окружающей среды (например, температуры и влажности) и...
-
Графики переходных функций объекта и замкнутой системы
Контрольная работа по дисциплине: "Системы автоматического управления" Цель работы. Построить графики переходных функций объекта и замкнутой системы. По...
-
Целесообразность введения автоматики В ходе проектирования любой автоматизированной системы разработчик должен решить важный вопрос: какая степень...
-
Таблица 3 ТЭП за отчетные периоды в ООО "ДЭС" Показатели Значения показателей 2012г 2013г 2014г Установленная мощность оборудования кВт 500 500 500...
-
Модель SCOR является инструментом для измерения эффективности функционирования и перестройки цепей поставок, а также для тестирования и планирования...
-
Синтез настроек регуляторов в системах автоматического управления методом расширенных частотных характеристик Цель работы: рассчитать оптимальные...
-
Расчет токов и напряжений до коммутации. Докоммутационная схема приведена на рис. 2. Рис. 2 Докоммутационная схема Расчет токов и напряжений в момент...
-
Показатели качества IP-телефонии - IP-телефония и традиционные телефонные сети
Традиционные телефонные сети коммутируют электрические сигналы с гарантированной полосой пропускания, достаточной для передачи сигналов голосового...
-
Введение - Показатели эффективности управления цепями поставок по модели SCOR
Практически все предприятия рано или поздно сталкиваются с проблемами недостаточности ресурсов, большинство из этих компаний в таких случаях прибегают к...
-
Законы управления (программы) переключения передач в автоматической трансмиссии обеспечивают оптимальную передачу энергии двигателя колесам автомобиля с...
-
Система, поддерживающая ARTCP, может быть также совместима с TCP. Для этого, инициатор соединения, поддерживающий ARTCP, помещает в заголовке...
-
Заключение - Показатели эффективности управления цепями поставок по модели SCOR
На сегодняшний день, по признанию многих ведущих отечественных и зарубежных специалистов, управление цепями поставок является одним из наиболее...
-
А) повременно-премиальная система оплаты труда Б) аккордно-премиальная система В) единовременная премия Г) повременная Тема 10. Планирование...
-
Для оценки результатов эксплуатационной работы устанавливается плановый показатель качества, рассчитываемы в баллах. Этот показатель учитывает...
-
Сущность и структура SCOR-модели цепи поставок SCOR-модель. Референтная модель цепи поставок - Supply Chain Operations Reference model (SCOR-модель), она...
-
Каждая организация должна быть заинтересована в повышении и развитии эффективности своего бизнеса. Для эффективной работы предприятия в целом, для...
-
Влияние сети на показатели качества IP-телефонии - IP-телефония и традиционные телефонные сети
Задержка создает неудобство при ведении диалога, приводит к перекрытию разговоров и возникновению эхо. Эхо возникает в случае, когда отраженный речевой...
-
Контроль качества ТО и ремонта автомобилей является основной частью производственного процесса. Конечной целью контроля являются предупреждение брака и...
-
Характеристика логистической инфраструктуры ООО "Мебельная компания ЛЕРОМ" ООО "Мебельная компания ЛЕРОМ" - российское предприятие, созданное в г. Пенза...
-
Система контроля и управления процессом проводки нефтяных и газовых скважин "Леуза-1"
Система контроля и управления процессом проводки нефтяных и газовых скважин "Леуза-1" Одной из наиболее актуальных задач при проведении...
-
Пакет Teamcenter Engineering (ранее известный как IMAN) предназначен для поддержки жизненного цикла изделий на ранних стадиях: от концептуального...
-
В состав лабораторной установки входят: - аналоговая вычислительная машина МН-10, на лицевой панели которой набрана электронная модель следящей системы;...
-
При анализе нелинейных цепей (НЦ) обычно не рассматривают процессы, происходящие внутри элементов, составляющих эту цепь, а ограничиваются лишь внешними...
-
Основы эксплуатации системы управления - Технология ремонта рулевого управления
В процессе эксплуатации автомобиля отдельные узлы и агрегаты, входящие в систему рулевого управления, постепенно приходят в негодность. Особенно, это...
-
Технико-экономические показатели - Анализ деятельности логистической компании
Технико-экономические показатели - система измерителей, характеризующая материально-производственную базу предприятий и комплексное использование...
-
В последнее время в Республике Беларусь необходимость развития современной логистической инфраструктуры и важность логистических подходов к управлению...
-
Концепция управления цепями поставок является одним из наиболее развивающихся направлений практической и научной деятельности на протяжении последних...
-
Сущность управления цепями поставок Термин "управление цепями поставок" (Supply Chain Management) широко используется на Западе уже более 15 лет, однако...
-
Численность работников аппарата управления дистанции определяется с учетом штатных нормативов в зависимости от группы дистанции и от контингента...
-
Особенности процессов в дискретных системах - Теория дискретных систем
В дискретных системах осуществляется преобразование информации, заданной в виде дискретных процессов, квантованных по времени или по времени и уровню...
-
Системный поход к моделированию
"Системный поход к моделированию" Любой искусственный объект можно рассматривать с двух точек зрения - глазами пользователя и глазами разработчика....
-
Определение переходной характеристики цепи Переходная характеристика цепи: H(t)=hпр(t)+hсв(t) (18) Т. к. воздействие - ток, а реакция - ток на...
-
Задача Рассмотрим поведение коэффициента равноправия разделения ПС для протоколов TCP и ARTCP в зависимости от числа соединений. Поведение коэффициента F...
-
Параметры: Параметр Значение ПС каналов 0, 1, 2, 3 10 Мб/с Задержка каналов 0, 1, 2, 3 0.01 с ПС каналов 4, 5 128 Кб/с Задержка каналов 4, 5 0.1 с Время...
-
Общая схема модельного эксперимента Проведенный в рамках диссертации модельный эксперимент ставил задачей определение эффективности работы сети с...
-
Оптимизация электропотребления - Автоматизированные системы контроля и управления энергопотреблением
Процесс электропотребления для многих представляется весьма органичным: сколько электроэнергии необходимо потребителю, такое количество и должна...
-
Постановка задачи Целью данной работы является создание компактной, частично магнитоэкранированной конструкции магнетрона, предназначенного для работы в...
Анализ показателей качества САУ с нелинейным аппроксимирующим законом управления