Электропривод следящего действия по системе тиристорный преобразователь - двигатель - Расчет системы рулевого электропривода электромеханического типа
Рулевой электропривод следящего действия характеризуется перекладкой руля на тот борт и на такой угол, который задается рукояткой поста управления системы электропривода руля.
До настоящего времени системы ТП - Д не нашли применения для привода рулевых устройств, главным образом из-за специфических требований, предъявляемых к ним и невыгодности промышленного производства их в мелкосерийном исполнении.
3. Расчет мощности и выбор исполнительного электродвигателя
Поскольку рабочая часть механических характеристик электродвигателя постоянного тока в системе с тиристорным преобразователем имеет высокую жесткость, расчет мощности исполнительного двигателя может производиться по следующей методике:
Номинальный момент, с учетом необходимости наличия избыточного момента при пуске электродвигателя в положениях пера руля, близких к бmax и возможного снижения напряжения сети на 10%


Где: 1,5 - кратность избыточного момента;
0,95 - коэффициент, учитывающий допуск по моменту.
Средняя угловая скорость электродвигателя с жесткой характеристикой, обеспечивающего перекладку руля с борта на борт в заданное время:


Где: - максимальный угол перекладки пера руля;
I - полное передаточное число рулевого устройства;
Т - время перекладки пера руля с борта на борт.
Номинальная угловая скорость двигателя:
Или


Об/мин
Номинальная мощность электродвигателя определяется по выражению:
Pн = Mнщн 10-3
Pн = 62.37137.4310-3=8.57 кВт
Параметры выбранного электродвигателя:
Тип - 4П132М4
Мощность - 10 кВт
Номинальный ток якоря - 18 А
Частота вращения - 1400 Об/мин
Момент инерции - 0,7 кг/м2
Сопротивление якоря и добавочных полюсов - 1,123 Ом
Сопротивление обмотки возбуждения - 256 Ом
Номинальный ток возбуждения - 1 А
Магнитный поток на полюсе - 7,9*10-4 Вб
Число пар полюсов - 4
Расчет элементов системы управления следящим приводом
При разработке системы управления необходимо учитывать то обстоятельство, что в следящих приводах изменение угловой скорости двигателя вызывается не только изменением нагрузки на его валу, но и изменением напряжения его якорной обмотки за счет изменения угла рассогласования между задающим органом и пером руля.
Для получения расчетных формул рассмотрим структурную схему приводов:
По структурной схеме получим выражение для отклонения пера руля

Передаточные функции всех пропорциональных звеньев структурной схемы могут быть представлены через передаточные коэффициенты этих звеньев. Исключение составит только интегрирующие звено, моделирующее рулевую машину.
Его передаточная функция для этого случая будет иметь вид:

Передаточный коэффициент рулевой машины:

Конструктивный коэффициент двигателя:

Где: 1,24 - коэффициент, учитывающий увеличение сопротивления меди при нагреве;
IH - номинальный ток якоря;
Rя - сопротивление цепи якоря двигателя;
?Н - номинальная угловая скорость двигателя.
Передаточный коэффициент двигателя по каналу управления:

Сопротивление якорной цепи системы преобразователь - двигатель:
RЯЦ = 1,24 2 rя
RЯЦ = 1,24 2 1,123 = 2,8 Ом
Передаточный коэффициент двигателя по каналу возмущения:

Величина коэффициента В:

Наклон нагрузочной диаграммы:

Расчетный коэффициент разомкнутой системы:

Выбор основных элементов схемы управления электроприводом и определение их статических параметров
Основными элементами, обеспечивающими функционирование электропривода рулевого устройства, кроме двигателя и рулевой машины, являются преобразователь и задающий орган, а для электроприводов следящего действия - еще и измеритель рассогласований.
Наиболее подходящим типом преобразователя следует считать реверсивный тиристорный преобразователь, при этом способ управления группами тиристоров в преобразователе значения не имеет.
Передаточный коэффициент тиристорного преобразователя:

В качестве измерителя рассогласований принимаем сельсинную пару, работающую в трансформаторном режиме. Выбираем в качестве сельсина
- датчика сельсин типа БД - 1404А с напряжением питания 110 В переменного тока и током обмотки возбуждения 0,45 А, а в качестве сельсина - приемника сельсин типа БС - 1404 с током обмотки возбуждения 0,45 А.
При угле рассогласования атах = 30 напряжение на одно катушечной обмотке сельсина - приемника:
Uc = Unsin amax
Uc =110 sin30=55B
Передаточный коэффициент измерителя рассогласований (сельсинной пары):

Передаточный коэффициент фазочувствительного выпрямителя:

Реальный передаточный коэффициент разомкнутой системы:

Реальный передаточный коэффициент разомкнутой системы больше расчетного.
Если выполняется условие крр ? крс, то спроектированная система обеспечивает заданную статическую точность регулирования и заданное время перекладки пера руля с борта на борт.
Для обеспечения заданного Регистром времени перекладки пера руля с борта на борт выберем комплектный тиристорный преобразователь серии ЭТП 1-2
Тип - ЭПУ 1-24ХМ
Uном - 380-440В
Тип преобразователя: БС323М
Uзал - 10В
Якорная цепь:
Iном - 25А
Uном - 460В
Возбуждение:
Iном - 5А
Uном - 220В
Расчет динамических свойств системы
Расчет динамических свойств предполагает определение устойчивости спроектированной системы и построение кривой переходного процесса при изменении задающего воздействия в режиме удержания судна на курсе:
Передаточная функция разомкнутой системы:

Где: Wu=ku - передаточная функция измерителя рассогласований;
WФЧВ = kФЧВ - передаточная функция ФЧВ;
Wn = kn - передаточная функция преобразователя;
WД - передаточная функция двигателя по каналу напряжения;
WР - передаточная функция рулевой машины.
По алгебраическому критерию Гурвица САР устойчива, если выполняется условие : электродвигатель рулевой защитный ремонт
Тм > Тм Тя kpp
Индуктивность якорной цепи двигателя:

Где: k - коэффициент, равный 0,55
Ря - число пар полюсов двигателя
Электромагнитная постоянная времени:

Электромеханическая постоянная времени:

Поставив полученные значения постоянных времени и коэффициента разомкнутой системы в условие устойчивости, получим:
1,17 > 0,02
Условие выполняется, следовательно, система устойчива.
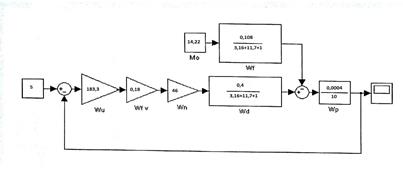
Рис3.Структурная схема следящей системы
Где: М0 - момент постоянно действующий на валу двигателя;
Wu=Ku - передаточная функция измерителя рассогласований.
Похожие статьи
-
Для построения нагрузочной характеристики электродвигателя рулевого устройства необходимо выбрать конкретную конструкцию секреторного рулевого привода,...
-
Введение, Конструкторский раздел - Расчет системы рулевого электропривода электромеханического типа
Электропривод рулевого устройства является наиболее важным и ответственным из всех механизмов, поскольку он обеспечивает управляемость, устойчивое...
-
Характеристика производственного участка и технологического процесса по сервисному обслуживанию объекта (Диагностика(д) ТО и ремонт(р). Автосервис имеет...
-
- Коэффициент, учитывающий изменение условий охлаждения по длине поверхности корпуса, обдуваемого наружным вентилятором (6 - 341,[1]) : - Коэффициент...
-
Выбор двигателя - Система автоматического регулирования гидроакустикой батискафа
Названия машины постоянного тока объединяют в один класс генераторы постоянного тока и двигатели постоянного тока. Причина объединения обратимость машин,...
-
Основы эксплуатации системы управления - Технология ремонта рулевого управления
В процессе эксплуатации автомобиля отдельные узлы и агрегаты, входящие в систему рулевого управления, постепенно приходят в негодность. Особенно, это...
-
Система управления преобразовательным устройством предназначена для формирования и генерирования управляющих импульсов определенной формы и длительности,...
-
Система подачи топлива предназначена для хранения запаса топлива, очистки топлива и посторонних примесей и для подачи его в цилиндры двигателя. Система...
-
Для расчета основных элементов системы импульсно-фазового управления (СИФУ) преобразователя вначале требуется выбрать тип цифровых и аналоговых...
-
- А - Реактивная составляющая тока холостого хода. Электрические потери в статоре при х. х . ( Приближенно ринимаются) , Вт, (6 - 214,[1]) : Активная...
-
Качество работы двигателя - его КПД, мощность, крутящий момент и экономичность зависят от многих факторов, в том числе и от фаз газораспределения, то...
-
Расчет коэффициентов усиления звеньев и постоянных времени K1, K2, K3-коэффициенты усиления звеньев; T1, T2, T3-постоянные времени; N-номер варианта,...
-
Мощность сигнала, получаемого из выхода формирователя длительности импульсов мала. Усилитель импульсов предназначен для усиления импульсов перед их...
-
Расчет полной, активной и реактивной мощностей Активная мощность, потребляемая ТП в номинальном режиме , (8.1) Где - действующее значение фазного...
-
Полный вращающий момент двигателя складывается из вращающих моментов, созданных многими парами проводников, лежащих на якоре под разно полярными главными...
-
Регулировочная характеристика СИФУ при косинусоидальном опорном напряжении определяется выражением . (7.1) При линейной пилообразной форме опорного...
-
Расчет и выбор трансформатора Выбор силового трансформатора производится по расчетным значениям тока I 2ф , напряжению U 2ф , и типовой мощности S Т ....
-
Типовые дискретные звенья - Теория дискретных систем
Сложную передаточную функцию дискретной системы удобно представлять в виде произведения передаточных функций типовых звеньев не выше второго порядка, как...
-
Преобразователь силы в давление сжатого воздуха - Типы преобразователей
Такой преобразователь состоит из рычага 1, сопла с заслонкой 4, сильфона 6, а также пневматического усилителя мощности 5. Входным сигналом...
-
Система управления двигателем - Электрооборудование автомобиля и дополнительное оборудование
Системой управления двигателем называется электронная система управления, которая обеспечивает работу двух и более систем двигателя. Система является...
-
Рассчитываем крутящий момент двигателя в целом. Для этого выписываем заносим в него ординаты крутящего момента из табл. 14. Суммируем значение ординат...
-
Возможность изменения степени сжатия - Конструирование и расчет двигателей внутреннего сгорания
Впервые мотор с изменяемой степенью сжатия был представлен на Женевском автосалоне в 2000 г. компанией Saab. Пятицилиндровый двигатель объемом 1,6 л...
-
Противопожарный вертолет аэродинамический Признаками возникновения пожара так же могут являться наиболее интенсивное падение оборотов НВ и...
-
Номинальная мощность Ne = 2447 кВт; Номинальная частота вращения n = 520 мин-1; Удельный расход топлива qе = 192 г / кВт ч. Водоизмещение судна D = 2400...
-
Коленчатый дизельный рулевой топливоподкачивающий Рулевое управление - совокупность механизмов автомобиля, обеспечивающих его движение по заданному...
-
В последние годы стали все шире использовать дизельные двигатели на автомобилях. Следует признать, что использование карбюраторных двигателей на грузовых...
-
Когда в 1897 г. Рудольф Дизель создал первый работоспособный двигатель, он не мог предвидеть, какие изменения претерпит его идея. Особенно большие...
-
1. Включить источник постоянного тока. 2 .Включить АЗС: "Общий", "Авт. сраб.", "Ручн. сраб", "Ручн. откр." 3 .Проконтролировать положение галетного...
-
Таблица 3.7 Технологическая оснастка ТО2 двигателя КРАЗ257 Наименование Модель или тип Количество Приспособление для сборки шатуна с поршнем ПИМ192 1...
-
Суммарная удельная сила равна Суммирование производится графически. Очень удобно делать это с помощью измерителя. В каждой точке (0, 30, ... 7200)...
-
Как отмечал А. И. Колчин и В. П. Демидов [ ] тепловой расчет позволяет с достаточной степенью точности аналитическим путем определить основные параметры...
-
Введение - Система охлаждения двигателя с электронным регулированием
При сгорании топлива, когда двигатель работает с полностью открытой заслонкой, максимальная температура сгорающих газов может достигать величины 1500 -...
-
Тяговый расчет проводят при проектировании нового автомобиля или модернизации существующей конструкции. Он сводится к определению параметров внешней...
-
Топливо . В соответствии с ГОСТ 305-82 для рассчитываемого двигателя принимаем дизельное топливо (для работы в летних условиях - марки Л и для работы в...
-
Система предпускового подогрева - Средства обеспечения пуска двигателя
Многие современные автомобили оснащаются на заводском конвейере специальными устройствами для легкого запуска двигателя зимой. Эти приборы называются...
-
Система электрического пуска двигателя - Средства обеспечения пуска двигателя
Предназначена для вращения коленчатого вала двигателя с пусковой частотой, при которой обеспечиваются необходимые условия смесеобразования, воспламенения...
-
Введение, Общее устройство системы охлаждения двигателя автомобиля - Система охлаждения двигателя
ЗМЗ-402 - семейство бензиновых 4-цилиндровых автомобильных двигателей, производства ОАО "Заволжский моторный завод. Данное семейство двигателей...
-
В автомобильных двигателях наибольшее распространение получила комбинированная смазочная система, при которой основные наиболее нагруженные трущиеся...
-
Контакторы - Расчет системы электрооборудования пассажирского вагона
Контакторы предназначены для дистанционного включения и выключения потребителей электроэнергии в схемах с автоматическим или ручным управлением. При...
-
Определение пиковых токов - Расчет системы электрооборудования пассажирского вагона
Пиковые токи - это максимальные токи, возникающие в процессе нормальной эксплуатации электрооборудования при включении мощных потребителей....
Электропривод следящего действия по системе тиристорный преобразователь - двигатель - Расчет системы рулевого электропривода электромеханического типа