Пример модели в Simulink: оптимальная система стабилизации спутника с электромаховичными исполнительными органами - Среда визуального моделирования Simulink
Описание задачи
Рассматривается угловое движение спутника, в котором в качестве органов управления используются двигатели-маховики. Полет в условиях космоса характеризируется отсутствием демпфирующей среды. Это приводит к неустойчивому движению спутника относительно центра масс. Поэтому необходимо синтезировать оптимальную систему стабилизации вращения спутника с двигателями-маховиками, обеспечивающую парирование постоянного возмущающего воздействия и использующую в качестве измерителей датчики угловых скоростей.
Построение модели
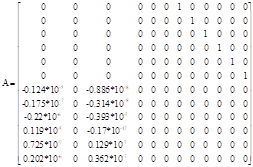
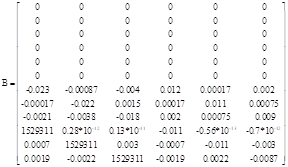
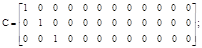
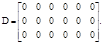
В качестве модели спутника с учетом двигателей маховиков будем использовать модель в пространстве состояний. В пространстве состояний полученная математическая модель объекта управления может быть представлена в виде:

Для реализации модели спутника с учетом двигателей-маховиков в Simulink используем блок State Space. Здесь задаем значения матриц A, B, C, D:
;
;
Информацию об углах ориентации спутника будем считывать с помощью осциллограф Scope.
Информацию об угловых скоростях подадим на датчики угловых скоростей (ДУС). ДУСы представим с помощью блоков Gain. Для осуществления обратной связи по углам стабилизации необходимо проинтегрировать информацию с ДУСов. Для этого вводим в обратную связь блоки интегрирования.
Информацию с ДУСов и интеграторов суммируем и подаем на объект управления.
Полученная структурная схема представлена на рис. 6.1.
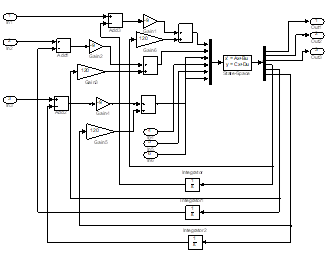
Рис. 6.1. Структурная схема объекта управления
Синтез оптимального регулятора
Далее для полученной системы синтезируем линейный квадратичный регулятор и используем фильтр Калмана в качестве наблюдателя состояния.
Таким образом, оптимальный регулятор будем формировать в виде:
,
Где - это состояния системы, оцененные с помощью фильтра Калмана.
Уравнения регулятора в пространстве состояний можно представить в виде:

Таким образом, сформируем структурную схему оптимальной системы управления (СУ) (рис. 6.2).
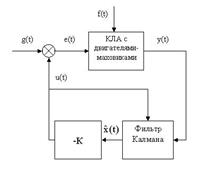
Рис. 6.2 Структурная схема оптимальной СУ:
G(t) - задающее воздействие;
E(t) - ошибка;
F(t) - возмущающее воздействие;
Y(t) - выход СУ;
U(t) - управляющее воздействие;
К - матрица коэффициентов закона управления.
Для синтеза регулятора используем MATLAB.
Сначала представим полученную с помощью Simulink модель в пространстве состояний:
[A, B, C, D]=linmod('mod_pdsp');
Sys_opt=ss(A, B, C, D)
Зададим названия входам и выходам модели:
Set(sys_opt,'inputn',{'Md1' 'Md2' 'Md3' 'Mx' 'My' 'Mz'});
Set(sys_opt,'outputn',{'kren' 'kurs' 'tangaj' 'wx' 'wy' 'wz'})
Для синтеза квадратичного регулятора необходимо задать значения весовых коэффициентов.
Примем их равными:
Q=1; R=8.
Синтезируем квадратичные регуляторы отдельно для каждого канала управления:
Kren=minreal(sys_opt(1,1));
Kurs=minreal(sys_opt(2,2));
Tang=minreal(sys_opt(3,3));
K1 = lqry(kren, Q, R)
K2 = lqry(kurs, Q, R)
K3 = lqry(tang, Q, R)
Для синтеза наблюдателя Калмана выберем значения весовых коэффициентов:
Qn=100000; rn=1;
Синтезируем наблюдатели отдельно для каждого канала управления:
Pkr=minreal(sys_opt(4,[1 4]))
[Kest_kr, L1] = kalman(Pkr, qn, rn)
Pkur=minreal(sys_opt(5,[2 5]))
[Kest_kur, L2] = kalman(Pkur, qn, rn)
Ptan=minreal(sys_opt(6,[3 6]))
[Kest_tan, L3] = kalman(Ptan, qn, rn)
Далее сформируем регуляторы, состоящие из квадратичного регулятора и наблюдателя Калмана:
F = lqgreg(Kest_kr, K1);
F1 = lqgreg(Kest_kur, K2);
F2 = lqgreg(Kest_tan, K3);
Сформируем общий регулятор для всей системы:
Regopt = append(F, F1, F2);
Полученный регулятор вставим в Simulink модель с помощью блока LTI system (рис. 6.3).
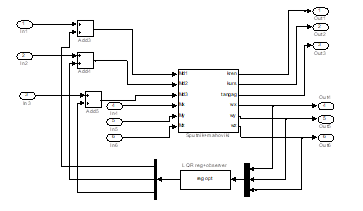
Рис. 6.3. Структурная схема оптимальной системы стабилизации
Для снятия показателей качества системы подаем на управляющий вход системы единичное ступенчатое воздействие. Реакция системы представлена на рис. 6.4.
Определим показатели качества:
- - время переходного процесса: для канала крена - 8.2 с; для канала курса - 10.4 с; для канала тангажа - 15.5 с; - перерегулирование: для канала крена - 24.3%; для канала курса - 23.8%; для канала тангажа - 26.2%; - установившаяся ошибка - 00 для всех каналов.
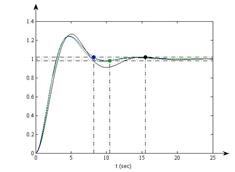
Рис. 6.4. Реакция оптимальной СУ на единичное ступенчатое воздействие
Далее необходимо установить реакцию системы на возмущения. Для этого подаем на объект управления ступенчатое возмущающее воздействие, что соответствует приложению к КЛА момента равному 1 Нм. Реакция системы на возмущения представлена на рис. 6.5.
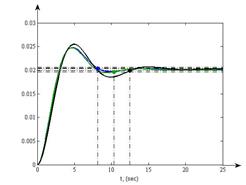
Рис. 6.5. Реакция оптимальной СУ на возмущение
Определим показатели качества:
- - время переходного процесса: для канала крена - 8.12 с; для канала курса - 10.3 с; для канала тангажа - 12.5 с; - перерегулирование: для канала крена - 23.5%; для канала курса - 23.6%; для канала тангажа - 25.6%; - установившаяся ошибка - 0.020 для всех каналов.
Таким образом, полученная система управления удовлетворяет требованиям, предъявляемым к таким системам.
Похожие статьи
-
Описание пакета Simulink - Среда визуального моделирования Simulink
С помощью Simulink возможно быстрое создание, моделирование и управление детализированной блок-диаграммой системы, использующей предопределенные блоки....
-
Достоинства и недостатки Simulink - Среда визуального моделирования Simulink
Важными достоинствами пакета MATLAB являются его открытость и расширяемость. Большинство команд и функций системы реализованы в виде текстовых m-файлов...
-
"Конкуренты" - Среда визуального моделирования Simulink
Рассмотрим универсальные пакеты, позволяющие моделировать структурно-сложные гибридные системы. Их можно условно разделить на три группы: 1) пакеты...
-
Аннотация, Общие сведения и назначение пакета Simulink - Среда визуального моделирования Simulink
В работе представлено общее описание, исторические сведения, "конкуренты" пакета визуального моделирования Simulink компании MathWorks. Приведены...
-
Для ускорения процесса конструирования регулятора в пространстве состояний в Matlab была разработана функция, которая, при должной настройке, позволяет...
-
История создания - Среда визуального моделирования Simulink
MATLAB - одна из старейших, тщательно проработанных и проверенных временем систем автоматизации математических расчетов, построенная на расширенном...
-
Генерация чертежей, Поддержка технологии OLE - Система твердотельного моделирования SolidWorks
После того, как конструктор создал твердотельную модель детали или сборки, он может автоматически получить рабочие чертежи с изображениями всех основных...
-
Графическое отображение нелокальной нейронной сети в системе "Эйдос" Математический метод СК-анализа в свете идей интервальной бутстрепной робастной...
-
Создание модели исследуемой системы - Исследование устойчивости линейной автоматической системы
Структурная схема системы, исследуемой в лабораторной работе, представлена на рис.1. Параметры регулятора K и T будут изменяться в ходе выполнения работы...
-
По Р. Шеннону (Robert E . Shannon - профессор университета в Хантсвилле, штат Алабама, США ), "имитационное моделирование - Есть процесс конструирования...
-
Основные этапы имитационного моделирования - Имитационные модели информационных систем
Как уже отмечалось, имитационное моделирование применяют для исследования сложных экономических систем. Естественно, что и имитационные модели...
-
Для упрощения работы с трехмерной моделью на любом этапе проектирования и повышения ее наглядности в SolidWorks используется Дерево Построений (Feature...
-
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система. Рис. 2 Далее, следуя методическим указаниям,...
-
Заключение - Проблемы конструирования устойчивой системы автоматического управления
Управление алгоритм фильтрация устойчивость В настоящей работе была проанализирована проблема оптимальной стабилизирующей фильтрации для класса объектов...
-
Обзор классического подхода Приведем теорему для формирования линейного закона управления с обратной связью в пространстве состояний [3]: Дан объект,...
-
Информационные модели - 3D моделирование
У всех людей есть разные образы, которые возникают как реакция на одни и те же объекты и явления. Именно поэтому образная модель является индивидуальной...
-
Введение - Система твердотельного моделирования SolidWorks
SolidWorks - мощное средство проектирования, ядро интегрированного комплекса автоматизации предприятия, с помощью которого осуществляется поддержка...
-
Строгое определение протокола выглядит как формализованный набор правил, используемый ПК для коммуникаций. Из-за сложности коммуникаций между системами и...
-
Программа COSMOSWorks - Система твердотельного моделирования SolidWorks
Адаптивный анализ сборок H-адаптивный способ детализацию сетки теперь поддерживает сборки. В прошлых версиях поддерживались только детали....
-
Имплементация нечетких моделей в информационные системы экономических объектов
Условия функционирования экономических объектов из года в год становятся все более сложными. Несмотря на улучшающуюся информационную поддержку принятия...
-
Обозначение элементов моделирования При экспресс-анализе для описания бизнес-процессов и построении их моделей, использовался программный продукт...
-
В работе использовались следующее программное обеспечение для решения поставленных задач: AutoCAD, ANSYS Workbench, ANSYS Icepak. Система AutoCAD...
-
Оценка стоимости разработки программного обеспечения, или, в частности информационной системы, - один из самых важных, сложных и в то же время неизбежных...
-
В настоящей главе будет произведен разбор частного случая задачи оптимальной фильтрации. На примере будет разобран ход построения алгоритма, будут...
-
ЭВМ обслуживает три терминала по круговому циклическому алгоритму, предоставляя каждому терминалу 30 с. Если в течение этого времени задание...
-
При создании программ и формировании структур баз данных нередко применяются формальные способы их представления - формальные нотации, с помощью которых...
-
Пpоцесс создaния модели в SolidWorks нaчинaется с постpоения опоpного телa и последующего добaвления или вычитaния мaтеpиaлa. Для постpоения телa...
-
Конструирование функционала - Проблемы конструирования устойчивой системы автоматического управления
Основная часть алгоритма - не связанная с математическими сложностями вычисления решений уравнений Риккати и Винера-Хопфа - заключается в составлении...
-
Проектирование модели - Разработка программного приложения "Калькулятор коммунальных услуг"
При проектировании информационных систем предметная область отображается моделями данных нескольких уровней. Число используемых уровней зависит от...
-
Структурная схема терминов Структуру АИС составляет совокупность отдельных ее частей, называемых подсистемами. АС состоит из двух подсистем:...
-
Воспользуемся теперь для поиска решения функционалом (2.13). Пространство операторов В рассматриваем примере добавка (2.12) может быть представлена:...
-
В процессе выполнения данного курсового проекта были получены уравнения заданных последовательностей сигналов, проведена минимизация полученных в...
-
Модели параллельных вычислений - Администрирование параллельных процессов
Параллельное программирование представляет дополнительные источники сложности необходимо явно управлять работой тысяч процессоров, координировать...
-
Решения по пользовательскому интерфейсу в части серверного приложения (вебсайт) Для реализации требований к серверному приложению (Сайту), объединяющему...
-
Структурирование информации - Информационные системы: понятия и характеристика
Системы управления базами данных выполняют следующие две основные функции: А) хранение и ведение представления структурной информации (данных); Б)...
-
Введение - Библиотека функциональных модулей системы EXP PKS
Корпорация Honeywell International известна своими разработками в области аэрокосмического оборудования, технологий для эксплуатации зданий и...
-
В классическом анализе Шеннона идет речь лишь о передаче символов по одному информационному каналу от одного источника к одному приемнику. Его интересует...
-
Полученное системное обобщение формулы Харкевича (3.28) учитывает как взаимосвязь между признаками (факторами) и будущими, в т. ч. целевыми состояниями...
-
Числовой массив блок используется для чтения или записи массив до 64 целых или отдельных значений с плавающей точкой точности. Входы / Выходы Блоки...
-
Введение - Система управления базами данных
Развитие средств вычислительной техники обеспечило для создания и широкого использования систем обработки данных разнообразного назначения....
Пример модели в Simulink: оптимальная система стабилизации спутника с электромаховичными исполнительными органами - Среда визуального моделирования Simulink