Нелинейные системы управления
Нелинейный система графический соединение
В силу уравнения замыкания б) переменная, а. Поэтому из предыдущего равенства выводим
.
Отсюда следует, что для получения обратной зависимости необходимо сложить (при отрицательной обратной связи) вдоль горизонтальной оси величины и соответствующие некоторым значениям x, которые откладываются вдоль вертикальной оси.
Для получения же искомой характеристики необходимо это же построение выполнить для характеристик и, также складывая их вдоль горизонтальной оси при некоторых значениях y.
Например, если характеристики и имеют вид, показанный на рис. 23 и рис. 24, то необходимые построения при отрицательной обратной связи выполняются так, как показано на рис. 25.
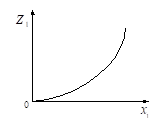
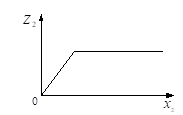
Рис. 23 Рис. 24
При положительной обратной связи построение характеристики рассматриваемого соединения отличается от приведенного на рис. 25 лишь тем, что из необходимо вычесть также при некоторых значениях.
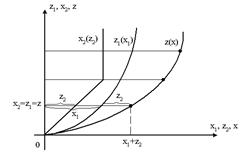
Рис. 25
Рассмотренные преобразования нелинейностей удобно выполнять с помощью ПЭВМ. Эти преобразования необходимы для упрощения структурных схем нелинейных систем, в частности, при исследовании установившихся режимов этих систем.
Отметим, что уравнения установившихся режимов получают из уравнений систем (1) полагая в них Уравнения установившихся режимов систем управления, как правило, являются нелинейными. Из них обычно получают статические характеристики, которые определяют зависимости между различными величинами системы в установившемся режиме.
Похожие статьи
-
Примеры нелинейных систем управления - Нелинейные системы управления
Покажем основные особенности нелинейных систем автоматического управления на конкретных примерах. Пример 1. Рассмотрим систему автоматического...
-
Общая характеристика нелинейных систем - Нелинейные системы управления
Основная особенность нелинейных систем заключается в том, что они не удовлетворяют принципу суперпозиции. Математические модели нелинейных систем - это...
-
Одним из наиболее важных аспектов построения систем моделирования является проблема цели. Любую модель строят в зависимости от цели, которую ставит перед...
-
Важным для системного подхода является определение структуры системы -- совокупности связей между элементами системы, отражающих их взаимодействие....
-
Равноускоренное (равнозамедленное) развитие. Этому типу динамики свойственно постоянное во времени увеличение (замедление) развития. Уровни таких рядов...
-
Наиболее ранним способом формализации экономико-математических и ТС является представление физических явлений с помощью систем дифференциальных...
-
В основе моделирования лежит теория подобия, которая утверждает, что абсолютное подобие может иметь место лишь при замене одного объекта другим точно...
-
СПОСОБЫ ОПИСАНИЯ СТРУКТУР. МОРФОЛОГИЯ СОЦИАЛЬНО-ПОЛИТИЧЕСКОЙ И ЭКОНОМИЧЕСКОЙ СФЕР Структурное моделирование. Структурный анализ Основная цель...
-
С развитием системных исследований, с расширением экспериментальных методов изучения реальных явлений все большее значение приобретают абстрактные...
-
Структурная целостность (связность) В системно-физическом плане внутренняя связность (связность) системы проявляется в наличии внутренних...
-
Введение - Основные методы и принципы моделирования в исследовании систем управления
В данной работе я попытаюсь раскрыть основные методы и принципы моделирования в разрезе исследования систем управления. Моделирование (в широком смысле)...
-
Основные направления совершенствования организационной структуры предприятия ОАО "Огонек". Любую перестройку структуры управления необходимо оценивать, в...
-
Функциональные свойства систем - Системная революция и принцип дуального управления
Функциональная полнота системы определяет степень соответствия системы функций, выполняемых системой, множеству функций, выполнение которых необходимо с...
-
Морфология дискретных систем - Системная революция и принцип дуального управления
Структуры дискретных систем при их представлении в виде некоторого графа условно можно разделить на Сетевые, скелетные, центральные, иерархические,...
-
Модель в общем смысле (обобщенная модель) есть создаваемый с целью получения и (или) хранения информации специфический объект (в форме мысленного образа,...
-
Заключение - Основные методы и принципы моделирования в исследовании систем управления
В заключение данной курсовой работы хочу сделать несколько выводов из вышеизложенного материала о моделировании в исследовании систем управления. Итак,...
-
Модель "вход - выход" для нестационарной системы управления можно представить в следующем виде [2] . Где коэффициенты матриц возмущения и ограничены...
-
В большинстве случаев структурная неопределенность вызвана неполнотой знания аналитической структуры уравнений модели объекта управления. При не...
-
Основные понятия теории экономико-математического моделирования Кибернетический подход к исследованию экономико-математических систем Обычно...
-
Совершенствование системы управления - сложный и непрерывный процесс воздействия, направленный на более целесообразную организацию управляющей системы...
-
Эффективность работы предприятия существенно зависит от организационной формы, выбранной для управления им. Поэтому организационная структура должна...
-
На базе системного подхода может быть предложена и некоторая последовательность разработки моделей, когда выделяют две основные стадии проектирования:...
-
Программное управление является приемлемым подходом во многих прикладных ситуациях. На этом принципе основаны, например, простые металлорежущие станки...
-
Моделирование начинается с формирования предмета исследований -- системы понятий, отражающей существенные для моделирования характеристики объекта. Эта...
-
В качестве примера конкретной модели процесса управления обсудим модель распределения времени между овладением знаниями и развитием умений, впервые...
-
При управлении подвижными объектами (такими, например, как мобильные роботы, подводные аппараты и т. п.) часто имеет место неопределенность цели, когда...
-
Моделирование процессов управления предполагает последовательное осуществление трех этапов исследования. Первый - от исходной практической проблемы до...
-
Математическое моделирование экономических явлений и процессов с целью оптимизации процессов управления - область научно-практической деятельности,...
-
СТРУКТУРЫ УПРАВЛЕНИЯ ЛОГИСТИЧЕСКИМИ СИСТЕМАМИ - Понятие и виды логистической системы
Объектом логистическими системами, как известно является сквозной материальный поток, тем не менее на отдельных участках управление им имеет известную...
-
Рассмотрим две проблемы сравнительной оценки эффективности различных подходов к оптимизации управления экономическими системами. Сравнение по...
-
Конкретные модели процессов управления в социальных и экономических системах исходят из общей методологии, которую и формулируем в настоящей статье....
-
Межотраслевой баланс в прогнозировании Развития экономики Экономика стран на современном этапе представляет собой сложный многоотраслевой комплекс с...
-
Применение систем эконометрических уравнений представляет собой непростую задачу. Проблемы здесь происходят из-за ошибок спецификации. Основной областью...
-
Система "Диспетчер" апробирована на реальных исходных данных двух регионов Нефтяной Компании "Юкос" (Липецкая и Воронежская области) и показала свою...
-
В состав системы эконометрических уравнений входят множество зависимых или эндогенных переменных и множество предопределенных переменных (лаговые и...
-
МЕТОДЫ ОПИСАНИЯ СОЦИАЛЬНО-ПОЛИТИЧЕСКИХ И ЭКОНОМИЧЕСКИХ ПРОЦЕССОВ Динамический образ системы. Системный процесс В своей повседневной жизни процессами люди...
-
Организационная характеристика ОАО "Огонек". ОАО "Огонек" является юридическим лицом. Оно имеет самостоятельный баланс, расчетный счет в банке, печать со...
-
В практике управления системами различного назначения (экономическими, финансовыми, техническими и др.) неизбежно приходится сталкиваться с различными...
-
Оценка адекватности включает в себя проверку способности модели правильно осуществлять идентификацию состояний МиУГВ как входящих в базу прецедентов...
-
Обычно субъект экономической жизни стремится достичь сразу многих целей. Например, он стремится одновременно следовать и внутренним, и внешним целям, тем...
Нелинейные системы управления