Примеры нелинейных систем управления - Нелинейные системы управления
Покажем основные особенности нелинейных систем автоматического управления на конкретных примерах.
Пример 1. Рассмотрим систему автоматического регулирования напряжения генератора постоянного тока (САР ГПТ) [5], схема которой приведена на рис. 1.
Если положить ток потенциометра равным нулю, т. е. , пренебречь рассеиванием магнитных полей и влиянием тока якоря на суммарный магнитный поток, то генератор постоянного тока (ГПТ) можно описать уравнениями
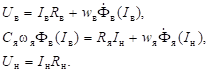
Здесь, и - активные сопротивления обмотки возбуждения (ОВ), обмотки якоря и нагрузки; ,- коэффициенты пропорциональности между ЭДС самоиндукции и скоростью изменения соответствующих магнитных потоков; - скорость вращения якоря ГПТ.
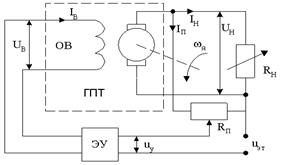
Рис. 1
Приведенные уравнения ГПТ очевидно являются нелинейными, так как содержат нелинейные функции и. Эти функции описывают зависимость магнитных потоков и от токов и. Для примера на рис. 2 показана сплошными линиями зависимость (петля гистерезиса). Аналогичный вид имеет зависимость.


Если пренебречь гистерезисом сердечников обмоток возбуждения генератора, то зависимость магнитного потока от тока возбуждения примет вид, показанный на рис. 2 штриховой линией. Обозначим - значение тока возбуждения при номинальном напряжении возбуждения, а - отклонение действительного значения тока от, т. е. положим.
На рис. 2 прямой наклонной линией, которая является касательной к графику в точке, показана линеаризованная зависимость потока возбуждения от тока. На рисунке хорошо видно, что если отклонения тока малы, то линеаризованная зависимость от очень близка к нелинейной зависимости. В этом случае можно нелинейную функцию заменить линейной. Аналогично, если при этом малы и отклонения тока нагрузки от номинального значения, то можно линеаризовать и нелинейную зависимость. В результате уравнения ГПТ станут линейными.
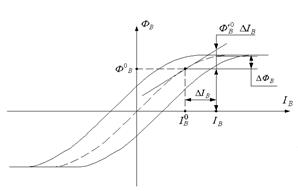
Рис. 2
Так как при малых отклонениях и (обычно это наблюдается в режиме стабилизации) электронный усилитель ЭУ и потенциометр можно считать линейными элементами, то в этом режиме рассматриваемая система является линейной.
При больших значениях отклонениях, как видно на рис. 2, линейная и нелинейная зависимость различаются очень сильно и замена невозможна. Следовательно, при больших отклонениях и (например, в режиме пуска) данная система (см. рис. 1) является существенно нелинейной.
Пример 2. В качестве второго примера рассмотрим релейную следящую систему (РСС), схема которой показана на рис. 3.
В этой схеме реле Р1, Р2 вместе с диодами V1, V2 и источником напряжения образуют нелинейный элемент (НЭ), который выделен штриховой линией. Его характеристика показана на рис. 4, где через, - обозначены ток срабатывания и ток отпускания реле. Величина С равна напряжению источника.
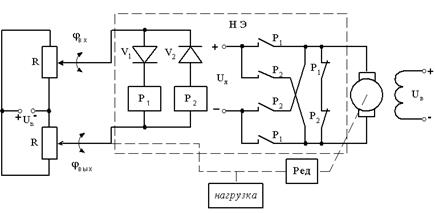
Рис. 3
Характеристика, приведенная на рис. 4, является нелинейной функцией (разрывной, то есть не дифференцируемой и неоднозначной). Эту характеристику нельзя линеаризовать обычным, описанным выше способом, так как в точках разрыва производные функции по не существуют. Следовательно, рассмотренная релейная система всегда является существенно нелинейной, и для ее исследования необходимо применять методы анализа нелинейных систем.
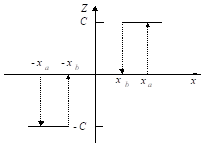
Рис. 4
Структурную схему рассматриваемой РСС можно представить, как показано на рис. 5. Здесь линейный элемент и сравнивающее звено - это объединение двигателя, редуктора и двух проволочных потенциометров R.
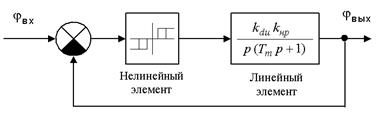
Рис. 5
Аналогичную структурную схему можно получить и для большинства других нелинейных систем. Как видно, большая часть элементов нелинейных систем может быть описана линейными уравнениями, т. е. их можно считать линейными элементами. Лишь некоторые элементы системы являются нелинейными. Таким образом, все особенности нелинейных систем обусловлены теми нелинейными элементами, которые встречаются в их структуре. Среди нелинейных элементов (звеньев) можно выделить наиболее часто встречающиеся. Такие нелинейные элементы называются типовыми.
Рассмотрим основные свойства характеристик типовых нелинейных звеньев.
§ 3. Общие свойства нелинейностей. Типовые звенья
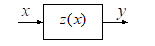
Общее обозначение нелинейных элементов или звеньев показано на рис. 6. Здесь - характеристика нелинейного звена, т. е. зависимость его выходного сигнала от входного при очень медленном изменении последнего.
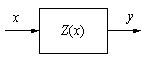
Рис. 6
В общем случае характеристики нелинейных звеньев могут быть:
1. Симметричными. В этом случае выполняется либо условие
, либо условие. В первом случае характеристики называются нечетными, а во втором - четными.
2. Непрерывными. В этом случае в любой точке нелинейной характеристики предел справа равен пределу слева, т. е. .
- 3. Разрывными. В этом случае в некоторых точках нелинейности предел справа не равен пределу слева, т. е. . 4. Однозначными или многозначными. В случае двузначной характеристики говорят, что нелинейный элемент обладает гистерезисом. В общем случае нелинейные звенья с неоднозначными характеристиками ведут к более существенному изменению свойств системы. 5. Обычно, но не всегда. Например, для петли гистерезиса (см. рис. 2) . 6. Многие нелинейности обладают насыщением. Это свойство характеризуется тем, что при больших значениях модуля входной величины модуль выходной величины нелинейного звена достигает максимального значения C, а затем перестает изменяться, т. е. остается постоянным, несмотря на увеличение входной величины. Нелинейная характеристика с насыщением (сплошная линия) показана на рис. 7.
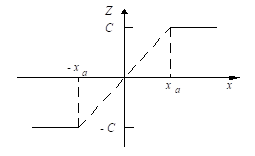
Рис. 7
Аналитическое описание нелинейности с насыщением имеет вид
Насыщением обладают все реальные элементы. В частности, статическая характеристика вход-выход всех электронных усилителей имеет насыщение.
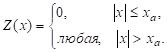
7. Важной характеристикой нелинейностей является зона нечувствительности. Характеристика с зоной нечувствительности (сплошная линия) показана на рис. 8. Здесь интервал значений от до является зоной нечувствительности, так как в этом диапазоне изменения величины выходная величина y звена равна нулю.
Рис. 8.
Характеристики с зоной нечувствительности могут быть описаны выражением вида:
К примеру, зону нечувствительности имеет нелинейная зависимость скорости холостого хода двигателя постоянного тока от напряжения на якоре при постоянном напряжении на обмотке возбуждения. В этом случае "величина зоны нечувствительности", т. е. величина, равна напряжению трогания, которое обусловлено моментом трения в подшипниках якоря двигателя.
Характеристики с зоной нечувствительности - одни из самых распространенных нелинейностей. Характеристикой такого типа обладает большинство датчиков. Например, проволочный потенциометрический датчик (см. рис. 3) имеет характеристику, показанную на рис. Здесь зона нечувствительности - обусловлена толщиной витка обмотки потенциометрического датчика.
Чувствительные элементы, питаемые переменным током, тоже имеют зону нечувствительности, которая обусловлена влиянием высших гармоник.
В этом случае характеристика обычно имеет вид, показанный на рис. 10. Когда входная величина, находиться внутри зоны нечувствительности, выходная переменная датчика является случайной величиной, среднее значение которой равно нулю.
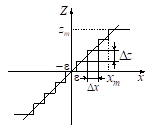
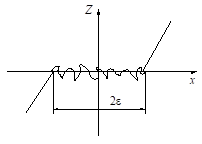
Рис. 9 Рис. 10
Лишь за пределами зоны нечувствительности шириной, выходная переменная датчика начинает изменяться определенным образом.
Отметим, что именно зоны нечувствительности элементов в первую очередь определяют статическую точность системы.
Рассмотрим некоторые типовые нелинейные звенья (нелинейности) и их характеристики.
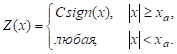
Идеальное реле (знаковая функция). Данная характеристика показана на рис. 11 сплошными линиями.
Рис. 11
При эта характеристика не определена. Аналитическое выражение этой характеристики имеет вид
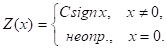
Данной характеристикой описывается, например, поляризованное реле, схема которого показана на рис. 12. При подаче на обмотку такого реле напряжения одной полярности магнитный поток и сила притяжения якоря к магниту уменьшаются, и замыкается верхняя пара контактов. В цепи нагрузки формируется напряжение одного знака. При подаче на обмотку реле напряжения противоположной полярности магнитный поток наоборот увеличится и замкнется нижняя пара контактов. В результате на нагрузку будет подано напряжение другого знака.
Такие элементы применяются при реализации оптимального управления. Знаковая функция является идеализацией реальных характеристик, одна из которых показана на рис. 11 пунктирной линией.
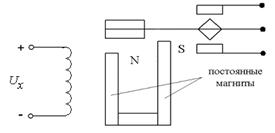
Рис. 12
Трехпозиционное реле. Эта характеристика имеет вид, показанный на рис. 13.
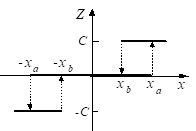
Рис. 13
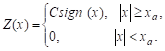
Как видно, она является разрывной, симметричной, нечетной, однозначной. Аналитическое описание этой характеристики:
Здесь - зона нечувствительности данного реле.
При эта характеристика переходит в нелинейность - идеальное реле. Характеристику, показанную на рис. 13, имеет схема, приведенная на рис. 14, если принять, что ток отпускания обоих реле равен их току срабатывания (на самом деле, ток отпускания всегда меньше тока срабатывания, но не намного).
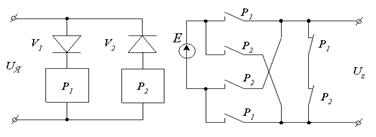
Рис. 14
Входная переменная x представлена здесь напряжением. Зона нечувствительности определяется током срабатывания, а равно E. Если из этой схемы удалить нормально замкнутые контакты то данная схема будет описывать релейную двухпозиционную характеристику, так как значение при не будет определяться этой схемой.
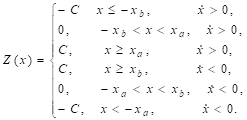
Трехпозиционное реле с гистерезисом. Эта характеристика приведена на рис. 15. Здесь интервал значений от - до является зоной нечувствительности; интервалы от до - и от до являются областью неоднозначности (областью гистерезиса).
При аналитическом описании этой характеристики необходимо учитывать не только значения величины, но и скорость ее изменения. В результате получим следующее выражение:
Примером нелинейного элемента, который может быть описан данной характеристикой, является показанный на рис. 14 релейный элемент, если ток отпускания реле считать не равным току срабатывания. Для этой схемы величина (см. рис. 15) определяется током срабатывания, а величина - током отпускания реле.
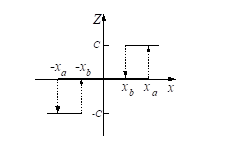
Рис. 15
Люфт. Эта характеристика обычно присуща механическим передачам и обусловлена зазором (люфтом) в сочленениях элементов. Она приведена на рис. 16. Аналитическое описание ее практически не используется, т. к. является очень сложным и непрактичным. Обычно оно заменяется словесным, например, следующим.
Если величина возрастает, то зависимость соответствует прямой, смещенной вправо от нуля на величину. Если же величина убывает, то зависимость соответствует прямой, смещенной влево от нуля на величину. При изменении знака скорости величины x вначале будет наблюдаться холостой ход, то есть выходная величина меняться не будет в течение времени, пока x не изменится на величину большую 2.
Характеристика люфт является неоднозначной и вносит некоторое запаздывание в работу систем управления. Она весьма отрицательно сказывается на свойствах динамических систем. Помимо уменьшения точности она может приводить к возникновению незатухающих колебаний в системе, амплитуда которых может значительно превышать "люфт". Коэффициент передачи звена типа люфт, в линейном режиме равен тангенсу угла, как показано на рис. 16.
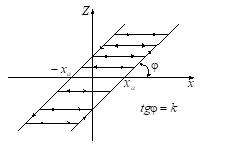
Рис. 16
На рис. 17 показана причина образования этой нелинейности в шарнирном соединении. Хорошо видно, что пока вилка, поворачиваясь вместе с ведущим валом на угол, не касается пальца, соединенного с ведомым валом, последний неподвижен, а после касания - поворачивается вместе с ведущим валом на угол.
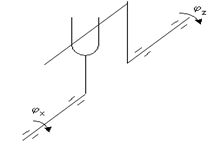
Рис. 17
При изменении направления вращения ведущего вала ведомый вал сначала останавливается, так как вилка отходит от пальца, а затем, после того как люфт (ширина вилки) будет выбран, ведомый вал начинает вращаться вместе с ведущим.
Кусочно-ломаная характеристика. Эта характеристика приведена на рис. 18. Как видно, она состоит из ряда линейных участков, угол наклона которых различный. Этой характеристикой обычно описывают различные исполнительные механизмы, тиристорные или магнитные усилители и т. д.
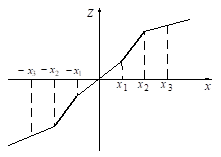
Рис. 18
Реальные элементы систем часто имеют характеристики, являющиеся комбинацией указанных типов нелинейностей.
Если реальная нелинейная характеристика имеет один линейный участок, то соответствующая ей типовая характеристика имеет линейный участок, проходящий под наклоном. Это связанно с тем, что значение коэффициента передачи реальной нелинейной характеристики обычно относят к линейной части системы.
Все однозначные нелинейности фактически являются безынерционными, так как имеющиеся у реальных элементов постоянные времени (например, электромагнитная постоянная обмотки реле) также относят к линейным элементам нелинейных систем. Однако, несмотря на это, многозначные нелинейные характеристики (например, с гистерезисом), вносят дополнительное запаздывание, что приводит к сдвигу фазы гармонических составляющих в разложении выходного сигнала таких элементов в ряд Фурье. Поэтому нелинейные звенья с неоднозначными статическими характеристиками фактически являются динамическими нелинейными звеньями.
§ 4. Определение характеристик соединений нелинейных элементов
Нелинейные элементы в системах управления могут быть соединены: параллельно, последовательно или в виде обратной связи. Для упрощения анализа такие соединения обычно заменяются одним нелинейным звеном. Характеристики этого эквивалентного звена определяются по характеристикам исходных элементов в зависимости от типа соединения.
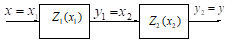
Последовательное соединение. Схема этого соединения показана на рис. 19, а. На рис. 19,б показана эквивалентная этому соединению нелинейность. Характеристика соединения определяется выражением
.
А б
Рис. 19
Графическое построение результирующей нелинейности при последовательном соединении (рис. 19) показано на рис. 20.

Рис. 20
Параллельное соединение. Схема этого соединения показана на рис. 21. Характеристика соединения определяется выражением

Рис. 21
Построение характеристики параллельного соединения, очевидно, выполняется суммированием характеристик и вдоль оси ординат и не составляет каких-либо проблем. Поэтому здесь не рассматривается.
Соединение в виде обратной связи. Схема этого соединения показана на рис. 22.
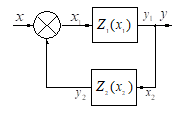
Рис. 22
Для определения характеристики этого соединения запишем в соответствии со структурной схемой следующие уравнения замыкания:
- А) , Б) .
Ведем функцию, обратную зависимости, и обозначим ее. Из уравнения а) для случая отрицательной обратной связи можно записать
Похожие статьи
-
Общая характеристика нелинейных систем - Нелинейные системы управления
Основная особенность нелинейных систем заключается в том, что они не удовлетворяют принципу суперпозиции. Математические модели нелинейных систем - это...
-
Наиболее ранним способом формализации экономико-математических и ТС является представление физических явлений с помощью систем дифференциальных...
-
Эффективность работы предприятия существенно зависит от организационной формы, выбранной для управления им. Поэтому организационная структура должна...
-
Важным этапом изучения явлений предметов процессов является их классификация, выступающая как система соподчиненных классов объектов, используемая как...
-
Моделирование начинается с формирования предмета исследований -- системы понятий, отражающей существенные для моделирования характеристики объекта. Эта...
-
Основные понятия теории экономико-математического моделирования Кибернетический подход к исследованию экономико-математических систем Обычно...
-
Система управление и его основные элементы С раннего детства человеку знакомо понятие "управление". Сначала мы сталкиваемся с управлением автомобилем,...
-
Введение - Основные методы и принципы моделирования в исследовании систем управления
В данной работе я попытаюсь раскрыть основные методы и принципы моделирования в разрезе исследования систем управления. Моделирование (в широком смысле)...
-
В современных условиях эффективность деятельности предприятия, прежде всего, определяется эффективностью использования главного ресурса - людей....
-
Функциональные свойства систем - Системная революция и принцип дуального управления
Функциональная полнота системы определяет степень соответствия системы функций, выполняемых системой, множеству функций, выполнение которых необходимо с...
-
Модели линейного программирования. Основные определения Еще одним классом задач экономико-математического моделирования являются задачи линейного...
-
Совершенствование системы управления - сложный и непрерывный процесс воздействия, направленный на более целесообразную организацию управляющей системы...
-
Основные направления совершенствования организационной структуры предприятия ОАО "Огонек". Любую перестройку структуры управления необходимо оценивать, в...
-
Равноускоренное (равнозамедленное) развитие. Этому типу динамики свойственно постоянное во времени увеличение (замедление) развития. Уровни таких рядов...
-
Одним из наиболее важных аспектов построения систем моделирования является проблема цели. Любую модель строят в зависимости от цели, которую ставит перед...
-
Важным для системного подхода является определение структуры системы -- совокупности связей между элементами системы, отражающих их взаимодействие....
-
При управлении подвижными объектами (такими, например, как мобильные роботы, подводные аппараты и т. п.) часто имеет место неопределенность цели, когда...
-
Для достижения поставленной цели предприятию требуются материалы, оборудование, энергия, рабочая сила и другие ресурсы. Каждое предприятие такими...
-
Теория игр исследует оптимальные стратегии в ситуациях игрового характера. К ним относятся ситуации, связанные с выбором наивыгоднейших производственных...
-
В предыдущем разделе мы определили, что существуют различные виды управления: производственное, техническое, государственное, идеологическое,...
-
Совершенствование системы управления - сложный и непрерывный процесс воздействия, направленный на более целесообразную организацию управляющей системы...
-
На сегодняшний день основным видом деятельности ОАО "Огонек" является розничная торговля. В процессе труда человек вступает во взаимодействие с...
-
В основе моделирования лежит теория подобия, которая утверждает, что абсолютное подобие может иметь место лишь при замене одного объекта другим точно...
-
Модель в общем смысле (обобщенная модель) есть создаваемый с целью получения и (или) хранения информации специфический объект (в форме мысленного образа,...
-
Элементы матричного анализа - Методы решения системы линейных уравнений
Вектором, как на плоскости, так и в пространстве, называется направленный Отрезок , то есть такой Отрезок , один из концов которого выделен и называется...
-
СТРУКТУРЫ УПРАВЛЕНИЯ ЛОГИСТИЧЕСКИМИ СИСТЕМАМИ - Понятие и виды логистической системы
Объектом логистическими системами, как известно является сквозной материальный поток, тем не менее на отдельных участках управление им имеет известную...
-
Модель "вход - выход" для нестационарной системы управления можно представить в следующем виде [2] . Где коэффициенты матриц возмущения и ограничены...
-
С развитием системных исследований, с расширением экспериментальных методов изучения реальных явлений все большее значение приобретают абстрактные...
-
Структурная целостность (связность) В системно-физическом плане внутренняя связность (связность) системы проявляется в наличии внутренних...
-
Организационная характеристика ОАО "Огонек". ОАО "Огонек" является юридическим лицом. Оно имеет самостоятельный баланс, расчетный счет в банке, печать со...
-
СПОСОБЫ ОПИСАНИЯ СТРУКТУР. МОРФОЛОГИЯ СОЦИАЛЬНО-ПОЛИТИЧЕСКОЙ И ЭКОНОМИЧЕСКОЙ СФЕР Структурное моделирование. Структурный анализ Основная цель...
-
В зависимости от содержания задачи может быть два случая: когда ребра графа G единичной длины; когда ребра графа произвольной длины. Для каждого из этих...
-
Организация работы по охране труда и безопасности персонала на предприятии ОАО "Огонек" осуществляется в соответствии со всеми нормами безопасности....
-
Наиболее важным применением теории нечетких множеств являются контроллеры нечеткой логики. Их функционирование несколько отличается от работы обычных...
-
1. Цыпкин, Я. З. Частотные критерии робастной модальной линейных дискретных систем / Я. З. Цыпкин, Б. Т. Поляк // Автоматика.-1990. - № 5. - С.4-11. 2....
-
Обычно субъект экономической жизни стремится достичь сразу многих целей. Например, он стремится одновременно следовать и внутренним, и внешним целям, тем...
-
Конкретные модели процессов управления в социальных и экономических системах исходят из общей методологии, которую и формулируем в настоящей статье....
-
В большинстве случаев структурная неопределенность вызвана неполнотой знания аналитической структуры уравнений модели объекта управления. При не...
-
Элементы 4 и 8 в исходной схеме соединены последовательно. Заменяем их квазиэлементом С. В исходной схеме элементы 12 и 13 образуют параллельное...
-
Город Москва является крупным промышленным центром. Здесь развито тяжелое машиностроение, химическая, металлургическая промышленность, теплоэнергетика и...
Примеры нелинейных систем управления - Нелинейные системы управления