KinectFusion - Программа трехмерной реконструкции сцены по изображениям и данным сканирования глубины
Алгоритм KinectFusion разработан Microsoft Research и опубликован в 2011 году, вскоре после появления Kinect [4]. В опубликованной статье описан алгоритм для трехмерной реконструкции сцены по потоку снимков глубины и использовании реконструкции для проектирования взаимодействия модели с пользователем. Алгоритм представляет сканируемое пространство как воксельный объем, внутри которого проводится реконструкция. Качество геометрической реконструкции зависит от разрешения воксельной сетки, разбивающей объем на отдельные воксели. После инициализации на первом снимке глубины проводится отслеживание смещения камеры относительно реконструируемой модели. KinectFusion не использует для геометрической реконструкции цветные снимки и обрабатывает только данные глубины. Алгоритм обновляет реконструируемую модель по потоку снимков глубины в реальном времени с помощью параллельных вычислений на графическом процессоре (GPU).
KinectFusion реализован в составе Kinect SDK и несовместим с другими RGB-D камерами. После публикации алгоритма появилось несколько отдельных реализаций, наиболее известной из которых является KinFu. KinFu [8] входит в состав Point Cloud Library - многофункциональной кроссплатформенной библиотеки для работы с облаками точек. KinFu позволяет использовать для реконструкции сцены другие устройства, такие как Asus Xtion Pro Live и PrimeSense Carmine. Данная реализация алгоритма используется в различных исследованиях и проектах, например в HouseScan [3] - полуавтоматической системе сканирования многокомнатных помещений.
В PCL имеется пользовательский интерфейс для KinFu (рис.3), но он обладает множеством недостатков. Во-первых, интерфейс разделен на 4 окна, которые могут перекрываться, если разрешение экрана недостаточно высокое. Во-вторых, управлять можно только вводом с клавиатуры, который действует не во всех окнах. В-третьих, в получаемой полигональной модели вершины дублируются для каждого полигона, что приводит к увеличению списка вершин в 3-4 раза. Пользователь также не может поменять в интерфейсе разрешение камеры или отключить автоматическое изменение баланса белого и экспозиции, из-за которых возникает дополнительная разница между изображениями. И, наконец, параметры запуска, такие как размер пространства, интеграция цвета, необходимо указывать при запуске в командной строке.
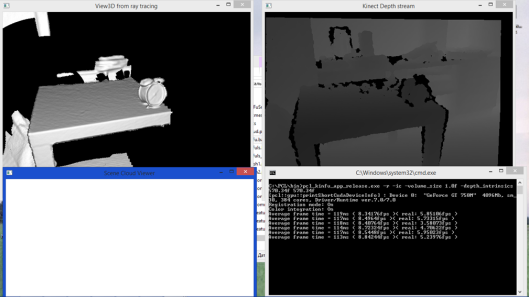
Рисунок 3. Интерфейс PCL KinFu.
В PCL есть расширение KinFu - KinFu Large Scale, которое позволяет расширить область сканирования путем сдвига воксельного объема. Но дополнительные вычисления замедляют скорость обработки снимков глубины, а для получения полигональной модели и ее текстурирования необходимо запускать две дополнительные программы kinfu_largeScale_mesh_output и kinfu_largeScale_texture_output.
Похожие статьи
-
Для отбора цветных снимков в процессе сканирования применяется алгоритм Crete [1] определения размытия изображения. На каждом временном интервале...
-
Для создания трехмерной реконструкции сцены или объекта необходимо создать его трехмерную модель и вычислить цвет ее вершин. Для геометрической...
-
Приложение, которое необходимо разработать, должно производить геометрическую реконструкцию сцены и вычисление цвета вершин модели. Для геометрической...
-
Заключение - Программа трехмерной реконструкции сцены по изображениям и данным сканирования глубины
В работе приведен обзор алгоритмов и технологий трехмерной реконструкции с помощью RGB-D камер, программных продуктов для трехмерного сканирования и...
-
Программные продукты, разработанные для трехмерного сканирования c использованием RGB-D камер, имеют много сходств в организации процесса сканирования и...
-
Введение - Программа трехмерной реконструкции сцены по изображениям и данным сканирования глубины
Трехмерная реконструкция и трехмерное сканирование в настоящее время быстро развиваются и находят широкое применение в робототехнике, медицине,...
-
RGB-D камера Реконструкция сцены с использованием Red-Green-Blue-Depth (RGB-D) камер производится путем обработки данных поступающих с сенсора глубины и...
-
Для вычисления цвета могут быть использованы различные подходы. Вычисление цвета может проводиться одновременно с геометрической реконструкцией,...
-
У рассмотренных ранее программ для трехмерной реконструкции имеются несколько недостатков при вычислении цвета модели. Выражаются они в том, что цвет...
-
В алгоритме Zhou&;Koltun при вычислении отклонений цвета используется изображение, переведенное в градации серого. В данной реализации используется...
-
В данной части алгоритма производится коррекция наложения изображения. Коррекция представляют собой деформацию сетки изображения. - прямоугольная...
-
Задачей данной части алгоритма является коррекция матрицы для каждого изображения из набора. Задача формулируется как задача наименьших квадратов для...
-
Технология создания баз данных в программе Microsoft Access
Введение Базы данных играют особую роль в современном мире. Любой из нас многократно начиная с детства, сталкивался с "базами данных". Это - всевозможные...
-
Обзор протокола Multi-Touch технологий передачи данных TUIO [7] - основной кроссплатформенный протокол с открытым исходным кодом Multi-Touch передачи...
-
ПОРЯДКОВЫЕ ТИПЫ, Логический тип - Типы данных в программе Турбо Паскаль
К порядковым типам относятся целые, логический, символьный, перечисляемый и тип-диапазон. Целые типы. Диапазон возможных значений целых типов зависит от...
-
Системная архитектура проекта Архитектура данных При организации любой управленческой работы, в том числе и работы по управлению заказами клиентов, очень...
-
Теоретические предпосылки исследования Системы поддержки принятия решений Системы поддержки принятия решений (СППР), представляют собой приложения узкого...
-
Обоснование выбранного метода При дизайне системы согласно требованиям или при оптимизации существующей необходимо ввести модель, позволяющую не только...
-
1. НА 7 ПК ИСПОЛЬЗУЕТСЯ microsoft Windows xp sp2. 2. на 1 используется Altlinux 5 3. Программы офисного назначения: A) Microsoft Office Excel 2003 B)...
-
Выбор программ и алгоритмы реализации базы данных - База данных "Кинотеатр"
Microsoft Office Access - мощное приложение Windows. При этом производительность СУБД органично сочетаются со всеми удобствами и преимуществами Windows....
-
Компромиссная система, для удобства восприятия данных человеком и корректной работы компьютера, двоично-десятичная запись чисел. Принцип построения этой...
-
ТИПИЗИРОВАННЫЕ КОНСТАНТЫ - Типы данных в программе Турбо Паскаль
В Турбо Паскале допускается использование типизированных констант. Они задаются в разделе объявления констант следующим образом: <индификатор> :...
-
ПРОЦЕДУРНЫЕ ТИПЫ, ТИП ОБЪЕКТ - Типы данных в программе Турбо Паскаль
Процедурные типы -- это нововведение фирмы Borland (в стандартном Паскале таких типов нет). Основное назначение этих типов -- дать программисту гибкие...
-
ЗАПИСИ, МНОЖЕСТВА - Типы данных в программе Турбо Паскаль
Запись - это структура данных, состоящая из фиксированного числа компонентов, называемых полями записи. В отличие от массива, компоненты (поля) записи...
-
В данном разделе была разработана функциональная схема работы программного комплекса, которая в общем виде описывает состав комплекса, характер и виды...
-
Предлагаемая библиотека хранит все данные в отдельных таблицах, таким образом он не обязан использовать ту же СУБД, что и основное приложение. В качестве...
-
Инфологическое моделирование - Банки и базы данных. Системы управления базами данных
Инфологическое проектирование является вторым этапом проектирования БД, который следует непосредственно после анализа предметной области. Эта стадия...
-
Организация кэш-памяти - Проблема организации и хранения данных
Концепция кэш-памяти возникла раньше, чем архитектура IBM/360. Сегодня кэш-память имеется практически в любом классе компьютеров, а в некоторых...
-
"Базы данных и СУБД", Понятие банка данных, базы данных и СУБД - Базы данных и СУБД
Понятие банка данных, базы данных и СУБД Существует множество различных систем управления базами данных, именуемые в последующем "СУБД", такие как: IMS,...
-
Основные средства администрирования системы 1С:Предприятие реализованы в составе конфигуратора. Однако есть ряд механизмов и утилит, которые не входят в...
-
Программы для работы в Сети., Браузеры. - Использование компьютерных сетей
Браузеры. Для связи с Internet используется специальная программа -- браузер. Первоначально браузеры предназначались для просмотра документов с...
-
Разработка концептуальной модели базы данных При проектировании программ выясняются запросы и пожелания клиента и определяется возможный подход к решению...
-
Инфологические и даталогические модели данных - Теория экономических информационных систем
СУБД должна предоставлять доступ к данным любым пользователям, включая и тех, которые практически не имеют и (или) не хотят иметь представления о: -...
-
Введение - Система управления базами данных
Развитие средств вычислительной техники обеспечило для создания и широкого использования систем обработки данных разнообразного назначения....
-
Определение и типология банков данных - Банки и базы данных. Системы управления базами данных
В основе решения практически любой задачи лежит обработка определенной информации. Система обработки информации, в том числе и автоматизированная с...
-
Интерфейс Пользовательский интерфейс программного обеспечения является неотъемлемой его частью. Именно через интерфейс конечный пользователь будет...
-
Основные понятия баз данных. Цели использования баз данных - Разработка базы данных
В широком смысле слова база данных (БД) - это совокупность сведений о конкретных объектах реального мира в какой-либо предметной области. Для удобной...
-
Второй этап истории развития БД. - Технология создания и управления баз данных
Второй этап - эпоха персональных компьютеров Персональные компьютеры стремительно ворвались в нашу жизнь и буквально перевернули наше представление о...
-
Моделирование параллельных программ Рассмотренная схема проектирования и реализации параллельных вычислений дает способ понимания параллельных алгоритмов...
-
Определение методов реинжиниринга информационных систем Основные задачи, которые стоят перед проектировщиком, занимающимся реинжинирингом информационных...
KinectFusion - Программа трехмерной реконструкции сцены по изображениям и данным сканирования глубины