Алгоритми растрової графіки
Завдання 1
Растровий сплайн сканування
Растрове розгорнення ліній
Реалізувати на вибір один з наступних алгоритмів
Алгоритм Брезенхэма побудови відрізка з довільним кутовим коефіцієнтом розташованого в будь-якому чотирьох квадрантів;
Алгоритм Брезенхэма побудови кола;
Побудувати довільну криву, задану як таблиця, на множині не рівновіддалених вузлів за допомогою сплайнів, що згладжують.
Виконання завдання 1
#include <windows. h>
#include "draw. h"
Const double PI = 3.141592653;
LRESULT CALLBACK WndProc(HWND, UINT, WPARAM, LPARAM);
Char szClassName[] = "CG_DDA_Fixed";
Int WINAPI WinMain(HINSTANCE hInstance, HINSTANCE hPrevInstance, LPSTR lpCmdLine, int nCmdShow)
{
HWND hWnd;
MSG lpMsg;
WNDCLASS wc;
// Заполняем структуру класса окна
Wc. style = CS_HREDRAW | CS_VREDRAW;
Wc. lpfnWndProc = WndProc;
Wc. cbClsExtra = 0;
Wc. cbWndExtra = 0;
Wc. hInstance = hInstance;
Wc. hIcon = NULL;
Wc. hCursor = LoadCursor(NULL, IDC_ARROW);
Wc. hbrBackground = (HBRUSH)GetStockObject(WHITE_BRUSH);
Wc. lpszMenuName = NULL;
Wc. lpszClassName = szClassName;
// Регистрируем класс окна
If (!RegisterClass(&;wc))
{
MessageBox(NULL, "Cannot register class", "Error", MB_OK);
Return 0;
}
// Создаем основное окно приложения
HWnd = CreateWindow(
SzClassName, // Имя класса
"Алгоритм Брезенхэма", // Текст заголовка
WS_OVERLAPPEDWINDOW, // Стиль окна
- 50, 50, // Позиция левого верхнего угла 600, 500, // Ширина и высота окна (HWND)NULL, // Указатель на родительское окно NULL (HMENU)NULL, // Используется меню класса окна (HINSTANCE)hInstance, // Указатель на текущее приложение
NULL); // Передается в качестве lParam в событие WM_CREATE
If (!hWnd)
{
MessageBox(NULL, "Не удается создать главное окно!", "Ошибка", MB_OK);
Return 0;
}
// Показываем наше окно
ShowWindow(hWnd, nCmdShow);
UpdateWindow(hWnd);
// Выполняем цикл обработки сообщений до закрытия приложения
While (GetMessage(&;lpMsg, NULL, 0, 0)) {
TranslateMessage(&;lpMsg);
DispatchMessage(&;lpMsg);
}
Return (lpMsg. wParam);
}
////////////////////////////////////////////////////////////////////////////////////////////////////
LRESULT CALLBACK WndProc(HWND hWnd, UINT messg, WPARAM wParam, LPARAM lParam)
{
PAINTSTRUCT ps;
RECT Rect ;
HDC hdc, hCmpDC;
HBITMAP hBmp;
Static int x1, y1, x2, y2;
Static bool draw_line = false;
Switch (messg)
{
Case WM_PAINT:
GetClientRect(hWnd, &;Rect);
Hdc = BeginPaint(hWnd, &;ps);
// Создание нового контекста для двойной буфферизации
HCmpDC = CreateCompatibleDC(hdc);
HBmp = CreateCompatibleBitmap(hdc, Rect. right - Rect. left,
Rect. bottom - Rect. top);
SelectObject(hCmpDC, hBmp);
// Закраска фоновым цветом
LOGBRUSH br;
Br. lbStyle = BS_SOLID;
Br. lbColor = 0xE1E4E7;
HBRUSH brush;
Brush = CreateBrushIndirect(&;br);
FillRect(hCmpDC, &;Rect, brush);
DeleteObject(brush);
// Рисование
If (draw_line)
{
Line(hCmpDC, x1, y1, x2, y2);
}
// Вывод на экран
SetStretchBltMode(hdc, COLORONCOLOR);
BitBlt(hdc, 0, 0, Rect. right - Rect. left, Rect. bottom - Rect. top,//hdc, 0, 0,...
HCmpDC, 0, 0, SRCCOPY);//hCmpDC, 0, 0
DeleteDC(hCmpDC);
DeleteObject(hBmp);
HCmpDC = NULL;
EndPaint(hWnd, &;ps);
Break;
Case WM_LBUTTONDOWN:
X1 = LOWORD(lParam);
Y1 = HIWORD(lParam);
Draw_line = false;
InvalidateRect(hWnd, NULL, FALSE);
Break;
Case WM_MOUSEMOVE:
If (UINT(wParam) &; MK_LBUTTON) {
X2 = LOWORD(lParam);
Y2 = HIWORD(lParam);
Draw_line = true;
InvalidateRect(hWnd, NULL, FALSE);
}
Break;
Case WM_LBUTTONUP:
Draw_line = true;
Break;
Case WM_DESTROY:
PostQuitMessage(0);
Break;
Default:
Return (DefWindowProc(hWnd, messg, wParam, lParam));
}
Return (0);
}
Скріншоти завдання 1
Завдання 2
Растрове розгорнення двовимірних областей
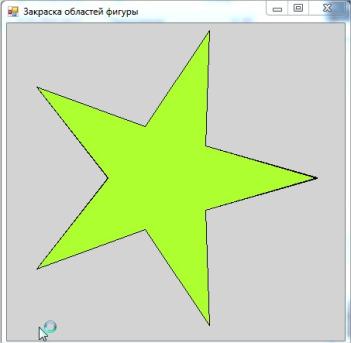
Зафарбувати внутрішню область довільного неопуклого багатокутника за допомогою методу сканування зі списком активних ребер.
Виконання завдання 2
Using System;
Using System. Collections. Generic;
Using System. ComponentModel;
Using System. Data;
Using System. Drawing;
Using System. Drawing. Imaging;
Using System. Linq;
Using System. Runtime. InteropServices;
Using System. Text;
Using System. Threading. Tasks;
Using System. Windows. Forms;
Namespace ZacraskaFigure2D
{
Public partial class Form1 : Form
{
Public Form1()
{
InitializeComponent();
}
Private void Form1_Paint(object sender, PaintEventArgs e)
{
}
Void PictureFill(Bitmap bitmap, int x, int y, Color color)
{
BitmapData data = bitmap. LockBits(
New Rectangle(0, 0, bitmap. Width, bitmap. Height),
ImageLockMode. ReadWrite, PixelFormat. Format32bppArgb);
Int[] bits = new int[data. Stride / 4 * data. Height];
Marshal. Copy(data. Scan0, bits, 0, bits. Length);
LinkedList<Point> check = new LinkedList<Point>();
Int floodTo = color. ToArgb();
Int floodFrom = bits[x + y * data. Stride / 4];
Bits[x + y * data. Stride / 4] = floodTo;
If (floodFrom!= floodTo)
{
Check. AddLast(new Point(x, y));
While (check. Count > 0)
{
Point cur = check. First. Value;
Check. RemoveFirst();
Foreach (Point off in new Point[] {
New Point(0, -1), new Point(0, 1),
New Point(-1, 0), new Point(1, 0)})
{
Point next = new Point(cur. X + off. X, cur. Y + off. Y);
If (next. X >= 0 &;&; next. Y >= 0 &;&;
Next. X < data. Width &;&;
Next. Y < data. Height)
{
If (bits[next. X + next. Y * data. Stride / 4] == floodFrom)
{
Check. AddLast(next);
Bits[next. X + next. Y * data. Stride / 4] = floodTo;
}
}
}
}
}
Marshal. Copy(bits, 0, data. Scan0, bits. Length);
Bitmap. UnlockBits(data);
}
Private void pictureBox1_Paint(object sender, PaintEventArgs e)
{
Using (Bitmap bitmap = new Bitmap(this. Width, this. Height))
{
Using (Graphics g = Graphics. FromImage(bitmap))
{
G. Clear(Color. LightGray);
List<Point> points = new List<Point>();
For (double i = 0; i < 10000; i++)
{
Double dist = (i % 2 == 0) ?200: 70;
Double x = 200 + Math. Cos(i / 10d * Math. PI * 2d) * dist;
Double y = 200 + Math. Sin(i / 10d * Math. PI * 2d) * dist;
Points. Add(new Point((int)x, (int)y));
}
G. DrawPolygon(Pens. Black, points. ToArray());
}
PictureFill(bitmap, 200,200, Color. GreenYellow);
E. Graphics. DrawImage(bitmap, 0, 0);
}
}
}
}
Скріншоти завдання 2
Завдання 3
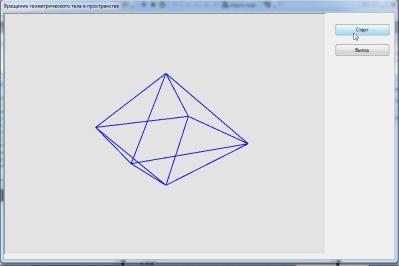
Дротова модель опуклого багатогранника
Задати багатогранник (куб або тетраедр) координатами вершин з врахуванням належності до грані в системі світових координат
Задати вектор спостереження його початковою точкою в сферичних координатах.
За допомогою матриці видових перетворень перевести координати вершин у систему координат, зв'язану з точкою спостереження.
За допомогою проективних перетворень перейти від видових координат до системи координат екранної площини.
Виконання завдання 3
Using System;
Using System. Collections. Generic;
Using System. ComponentModel;
Using System. Data;
Using System. Drawing;
Using System. Linq;
Using System. Text;
Using System. Threading. Tasks;
Using System. Windows. Forms;
Namespace CubeTrheeD3
{
Public partial class Form1 : Form
{
//Начало координат:
Private const double x_focus = 0;
Private const double y_focus = 0;
Private const double z_focus = 0;
//Сферические координаты глаза наблюдателя (точки E):
Private float r_Eye;
Private float phi_Eye;
Private float theta_Eye;
//Переменные и матрица (как массив) MatrixProjection:
//(во всех массивах нулевые индексы не используем):
Private const double pi = Math. PI;
Private int Tetrahedron;
Private int Cube;
Private int Octahedron;
Private int Dodecahedron;
Private int Icosahedron_first;
Private int Icosahedron_last;
Private float[,] MatrixProjection = new float[5, 5];
//Для параллельного проецирования объекта на экран
//(parallel projection) задаем константу:
Private const int ParallelProjection = 0;
//Для перспективного проецирования объекта на экран
//(perspective projection) задаем константу:
Private const int PerspectiveProjection = 1;
//Объявляем массив Lines структуры Line, оператором new
//создаем массив из 100 элементов и инициализируем его,
//т. е всем элементам этого массива присваиваем значение null:
Public Line[] Lines = new Line[100];
//Объявляем и инициализируем переменную для индекса массива:
Public int NumLines = 0;
Public Form1()
{
InitializeComponent();
}
Private void btnPlay_Click(object sender, EventArgs e)
{
//Вызываем метод для перспективного проецирования,
Projection(ref MatrixProjection, PerspectiveProjection,
R_Eye, phi_Eye, theta_Eye,
(float)x_focus, (float)y_focus, (float)z_focus, 0, 1, 0);
//Рассчитываем параметры геометрического тела:
СalculateParameters();
//Связываем элемент PictureBox1 с классом Bitmap:
PictureBox1.Image = new Bitmap(pictureBox1.Width,
PictureBox1.Height);
//Проектируем и в PictureBox рисуем выбранное нами тело:
Designing((Bitmap)pictureBox1.Image);
}
Private void btnClose_Click(object sender, EventArgs e)
{
Application. Exit();
}
Private void Form1_Load(object sender, EventArgs e)
{
//Задаем координаты глаза наблюдателя, например:
R_Eye = 4;
Phi_Eye = (float)(0.05 * pi);
Theta_Eye = (float)(0.03 * pi);//0.03
}
Protected override bool ProcessCmdKey(ref Message msg, Keys keyData)
{
//Задаем угол поворота фигуры после нажатия клавиши:
Const float delta_theta = (float)pi / 50; ;
//Рассчитываем новые координаты глаза наблюдателя:
If (keyData == Keys. Left)
Theta_Eye = theta_Eye - delta_theta;
If (keyData == Keys. Right)
Theta_Eye = theta_Eye + delta_theta;
If (keyData == Keys. Up)
Phi_Eye = phi_Eye - delta_theta;
If (keyData == Keys. Down)
Phi_Eye = phi_Eye + delta_theta;
//Проектируем выбранное нами геометрическое тело:
Projection(ref MatrixProjection, PerspectiveProjection,
R_Eye, phi_Eye, theta_Eye,
- (float)x_focus, (float)y_focus, (float)z_focus, 0, 1, 0);
Designing((Bitmap)pictureBox1.Image);
//В элементе PictureBox перерисовываем объект:
PictureBox1.Refresh();
Return true;
}
//Проектируем и при помощи процедуры DrawSolid
Private void Designing(Bitmap bmp)
{
//Создаем объект g класса Graphics:
Graphics g;
//Связываем объект g с изображением bmp:
G = Graphics. FromImage(bmp);
//Задаем белый цвет типа Window
//для элемента управления PictureBox1:
G. Clear(SystemColors. ControlLight);
//Высвобождаем ресурсы от графического объекта g:
G. Dispose();
//Преобразуем точки:
TransformAllDataFull(ref MatrixProjection);
// DrawSolid(bmp, Cube, Octahedron - 1,Color. Black, false);
DrawSolid(bmp, Octahedron, Dodecahedron - 1,Color. Blue, false);
}
//Рассчитываем параметры геометрических тел и осей:
Private void СalculateParameters()
{
Float theta1; float theta2;
Float s1; float s2; float c1; float c2;
Float S; float R; float H; float A;
Float B; float C; float D; float X;
Float Y; float y2; float M; float N;
//Оси координат:
DesigningLine(0, 0, 0, 0.5f, 0, 0); //Ось x.
DesigningLine(0, 0, 0, 0, 0.5f, 0); //Ось y.
DesigningLine(0, 0, 0, 0, 0, 0.5f); //Ось z.
//Октаэдр (Octahedron):
Octahedron = NumLines + 1;
DesigningLine(0, 1, 0, 1, 0, 0);
DesigningLine(0, 1, 0, -1, 0, 0);
DesigningLine(0, 1, 0, 0, 0, 1);
DesigningLine(0, 1, 0, 0, 0, -1);
DesigningLine(0, -1, 0, 1, 0, 0);
DesigningLine(0, -1, 0, -1, 0, 0);
DesigningLine(0, -1, 0, 0, 0, 1);
DesigningLine(0, -1, 0, 0, 0, -1);
DesigningLine(0, 0, 1, 1, 0, 0);
DesigningLine(0, 0, 1, -1, 0, 0);
DesigningLine(0, 0, -1, 1, 0, 0);
DesigningLine(0, 0, -1, -1, 0, 0);
}
//Объявляем структуру Line и массивы этой структуры:
Public struct Line
{
//Объявляем массивы для соединения точек (points):
Public float[] fr_points;
Public float[] to_points;
//Массивы для соединения преобразованных точек:
//(transformed (tr) points):
Public float[] fr_tr_points;
Public float[] to_tr_points;
//Создаем и инициализируем массивы, т. е.
//всем пяти элементам каждого массива присваиваем 0:
Public void Initialize()
{
Fr_points = new float[5];
To_points = new float[5];
Fr_tr_points = new float[5];
To_tr_points = new float[5];
}
}
//Проектируем линию между точками (x1,y1,z1),(x2,y2,z2):
Public void DesigningLine(float x1, float y1, float z1,
Float x2, float y2, float z2)
{
NumLines = NumLines + 1;
//Инициализируем и рассчитываем массив:
Lines[NumLines].Initialize();
Lines[NumLines].fr_points[1] = x1;
Lines[NumLines].fr_points[2] = y1;
Lines[NumLines].fr_points[3] = z1;
Lines[NumLines].fr_points[4] = 1;
Lines[NumLines].to_points[1] = x2;
Lines[NumLines].to_points[2] = y2;
Lines[NumLines].to_points[3] = z2;
Lines[NumLines].to_points[4] = 1;
}
//Применяем матрицу переноса (translation matrix)
//ко всем линиям, используя MatrixApplyFull.
//Преобразование не имеет 0, 0, 0, 1 в последнем столбце:
Public void TransformAllDataFull(ref float[,] M)
{
TransformDataFull(ref M, 1, NumLines);
}
//Применяем матрицу переноса (translation matrix)
//ко всем выделенным линиям, используя MatrixApplyFull.
//Преобразование не имеет 0, 0, 0, 1 в последнем столбце:
Public void TransformDataFull(ref float[,] M,
Int line1, int line2)
{
For (int i = line1; i <= line2; i++)
{
MatrixApplyFull(ref Lines[i].fr_points, ref M,
Ref Lines[i].fr_tr_points);
MatrixApplyFull(ref Lines[i].to_points, ref M,
Ref Lines[i].to_tr_points);
}
}
//Рисуем выделенные преобразованные линии:
Public void DrawSolid(Bitmap bmp,
Int first_line, int last_line, Color color, bool clear)
{
Float x1, y1, x2, y2;
Graphics g; Pen pen;
//Задаем толщину линии рисования, например, 2
//(цвет линии мы задали в процедуре Designing):
Pen = new Pen(color, 2);
//Связываем объект g с изображением bmp:
G = Graphics. FromImage(bmp);
If (clear) g. Clear(System. Drawing. Color. Black);
//Рисуем линии:
For (int i = first_line; i <= last_line; i++)
{
X1 = Lines[i].fr_tr_points[1];
Y1 = Lines[i].fr_tr_points[2];
X2 = Lines[i].to_tr_points[1];
Y2 = Lines[i].to_tr_points[2];
//Нормализуем и рисуем многогранник:
G. DrawLine(pen,
(x1 * bmp. Width / 4) + bmp. Width / 2.0F,
Bmp. Height / 2.0F - (y1 * bmp. Height / 4),
(x2 * bmp. Width / 4) + bmp. Width / 2.0F,
Bmp. Height / 2.0F - (y2 * bmp. Height / 4));
}
//Высвобождаем ресурсы от объектов g и pen:
G. Dispose(); pen. Dispose();
}
//Строим единичную матрицу:
Public void MatrixIdentity(ref float[,] M)
{
For (int i = 1; i <= 4; i++)
{
For (int j = 1; j <= 4; j++)
{
If (i == j) M[i, j] = 1;
Else M[i, j] = 0;
}
}
}
//Строим матрицу преобразования для поворота на угол theta
Public void m3LineRotate(ref float[,] M,
Float p1, float p2, float p3,
Float d1, float d2, float d3, float theta)
{
Float[,] T = new float[5, 5]; //Перенос.
Float[,] R1 = new float[5, 5]; //Вращение 1.
Float[,] r2 = new float[5, 5]; //Вращение 2.
Float[,] Rot3 = new float[5, 5]; //Вращение.
Float[,] R2i = new float[5, 5]; //Стоп вращению 2.
Float[,] R1i = new float[5, 5]; //Стоп вращению 1.
Float[,] Ti = new float[5, 5]; //Стоп переносу.
Float D, L;
Float[,] M12 = new float[5, 5];
Float[,] M34 = new float[5, 5];
Float[,] M1234 = new float[5, 5];
Float[,] M56 = new float[5, 5];
Float[,] M567 = new float[5, 5];
//Переносим плоскость к началу координат:
MatrixTranslate(ref T, - p1, - p2, - p3);
MatrixTranslate(ref Ti, p1, p2, p3);
//Вращаем вокруг оси z,
//пока линия не окажется в y-z плоскости:
MatrixIdentity(ref R1);
D = (float)Math. Sqrt(d1 * d1 + d2 * d2);
R1[1, 1] = d2 / D; R1[1, 2] = d1 / D;
R1[2, 1] = - R1[1, 2]; R1[2, 2] = R1[1, 1];
MatrixIdentity(ref R1i);
R1i[1, 1] = R1[1, 1]; R1i[1, 2] = - R1[1, 2];
R1i[2, 1] = - R1[2, 1]; R1i[2, 2] = R1[2, 2];
//Вращаем вокруг оси x, когда линия будет по оси y:
MatrixIdentity(ref r2);
L = (float)Math. Sqrt(d1 * d1 + d2 * d2 + d3 * d3);
R2[2, 2] = D / L; r2[2, 3] = - d3 / L;
R2[3, 2] = - r2[2, 3]; r2[3, 3] = r2[2, 2];
MatrixIdentity(ref R2i);
R2i[2, 2] = r2[2, 2]; R2i[2, 3] = - r2[2, 3];
R2i[3, 2] = - r2[3, 2]; R2i[3, 3] = r2[3, 3];
//Вращаем вокруг линии (оси y):
MatrixYRotate(ref Rot3, theta);
//Комбинируем матрицы:
M3MatMultiply(ref M12, ref T, ref R1);
M3MatMultiply(ref M34, ref r2, ref Rot3);
M3MatMultiply(ref M1234, ref M12, ref M34);
M3MatMultiply(ref M56, ref R2i, ref R1i);
M3MatMultiply(ref M567, ref M56, ref Ti);
M3MatMultiply(ref M, ref M1234, ref M567);
}
}
Скріншоти завдання 3
Похожие статьи
-
Namespace NotificationService { Partial class NotificationService : ServiceBase { Public NotificationService() { InitializeComponent(); If (!System....
-
ЗАГАЛЬНА РОБОТА З ГРАФІКОЮ - Створення 2D гри, використовуючи можливості Java
Двомірні гри це добре, але з них можна вичавити більше застосувавши изометрическую проекцію, тим самим створивши ілюзію тривимірного простору. Треба...
-
Даний розділ один з найбільш об'ємних, в зв'язку з різноманіттям функцій створення, коригування, трансформування координат і друку багатьох звітних форм....
-
Розглянемо порядок заповнення інформації про внутрішньогосподарські пристрої земельних ділянок. Для всіх ділянок несільськогосподарського призначення...
-
Для проведения тестов была написана программа задания единичного интервального графа. Входные параметры: число вершин, длина отрезка на котором задается...
-
Программные модули проекта, Представление графа в памяти ЭВМ - Алгоритмы нескольких махов
Все программы были реализованы на языке С++ на персональной ЭВМ с операционной системой Windows. Каждая программа представляет собой консольное...
-
Поворот точки относительно центра на заданный угол: X = o. X + (p. X-o. X) * cos(angle) - (p. Y-o. Y) * sin(angle) Y = o. Y + (p. X-o. X) * sin(angle) +...
-
Обоснование выбранного метода При дизайне системы согласно требованиям или при оптимизации существующей необходимо ввести модель, позволяющую не только...
-
Сравнение аналогов - Разработка программы для реализации редактора временных графов синхронизации
Поскольку конечной целью работы был редактор сетей Петри, интегрированный с внешней библиотекой алгебраических вычислений, было рациональным рассмотреть...
-
Множество D с двумя заданными на нем операциями (плюс) и (умножение) называется диоидом, если выполнены следующие аксиомы: § Ассоциативность. §...
-
Заключение - Разработка программы для реализации редактора временных графов синхронизации
Результатом выполнения задания является реализованный редактор временных графов синхронизации (класс временных сетей Петри), соответствующий задачам,...
-
Пример с tegview ¦ L-- qml ¦ +-- tegrender. js ¦ L-- tegview. qml +-- tegview ¦ +--...
-
Сеть Петри это двудольный направленный граф с маркировкой, ребра которого задают причинно-следственные отношения "события-условия" и именуются дугами....
-
Приложение разрабатывается в соответствии с паттерном проектирования Model-View-Presenter (MVP), который является производным от Model-View-Controller...
-
Итерационные алгоритмы разрезания графа на куски
Лекция Итерационные алгоритмы разрезания графа на куски Суть Итерационных Алгоритмов Разрезания Графов заключается в выборе первого случайного разрезания...
-
Розвиток комп'ютерної графіки - Визначні постаті у розвитку комп'ютерної графіки
Комп'ютерна графіка з'явилась достатньо давно - вже у 1960-х роках існували повноцінні програми роботи з графікою. Сьогодні прийнято користуватися...
-
Наслідки використання комп'ютерної графіки - Визначні постаті у розвитку комп'ютерної графіки
Абсолютно змінилася архітектура програм. Якщо раніше батько програмування Вірт говорив, що будь-яка програма це алгоритм + структура даних, то з появою...
-
Вступ - Визначні постаті у розвитку комп'ютерної графіки
Комп'ютерний графіка сазерленд дуглас На початку свого розвитку комп'ютерну графіку розглядали, як частину системного програмування для ЕОМ чи один з...
-
Заповнивши список координат ділянки вручну, або зробивши імпорт із зовнішніх форматів, у Вас виникне природна потреба в перегляді результатів вашої...
-
Библиотека GridMD поддерживает три механизма определения действий, связываемых с узлами графа [8]. Узел графа может соответствовать исполнению стороннего...
-
Геоінформаційний система проектування моделювання Порядок реєстрації земельних ділянок З набранням чинності Законом України "Про Державний земельний...
-
Вступ - Розробка графічної частини проекту землеустрою засобами геоінформаційних систем
Геоінформацімйна Системма - сучасна комп'ютерна технологія, що дозволяє поєднати модельне зображення території (електронне відображення карт, схем,...
-
Стек технологий При выборе стека технологий основное внимание уделялось следующим факторам, в порядке убывания значимости: § Кроссплатформенность; §...
-
Висновок - Комп'ютерна графіка - погляд у майбутнє
Усі області застосування - чи це інженерна і наукова, бізнес, і мистецтво - є сферою застосування комп'ютерної графіки. Возрастающий потенціал ПК та його...
-
Застосування КГ для формування різноманітної графічної інформації в різних галузях людської діяльності свідчить про те, що комп'ютерна графіка та...
-
Выбор интерфейса Пользовательский интерфейс представляет собой совокупность программных и аппаратных средств, обеспечивающих взаимодействие пользователя...
-
Головне вікно програми роботи з пристроєм містить декілька кнопок керування, а саме: "Scan PCI", "Memory operations", "Configure device", "Send". Рис.11....
-
Элементы теории графов. Сеть Петри. Конечный автомат
Вариант №8 Задача 1. Элементы теории графов Связный ориентированный граф G(Х, Г) задан множеством вершин X={x1, x2, ..., xn} и отображением Гxi={x|Ik|,...
-
Граф переходов конечного автомата лексического анализатора Исходная КС-грамматика G({prog, end., if, else, then, begin, end, while, do, or, and, not,...
-
Програмний забезпечення інформація база Для адміністрування і перегляду бази даних скористаємося програмним продуктом EMS SQL Manager 2010 for MYSQL....
-
Розроблений програмний модуль ІС "ГППР " призначений для використання на тепловій електростанції з метою забезпечення комплексної автоматизації обліку...
-
Загальні відомості Для реалізації даного проекту було вибрано середовище розробки Visual Studio 2008 Professional Edition. Дане середовище розробки є...
-
Нормалізація таблиць бази даних - перший крок на шляху проектування структури реляційної бази даних. Нормалізація - це процес організації даних в базі...
-
Модель Суть-Зв'язок (ER-модель) - модель даних, що дозволяє описувати концептуальні схеми. Надає собою графічну нотацію, засновану на блоках і лініях, що...
-
UML - моделювання Більшість існуючих методів об'єктно-орієнтованого аналізу і проектування (ООАП) включають як мову моделювання, так і опис процесу...
-
Сучасні вимоги до ІС "ГППР" надає адміністрації та співробітникам унікальну можливість отримувати повну і достовірну інформацію про наявне устаткування,...
-
Існуючим аналогом є програма "1С: Управління Виробничим Підприємством для України". Програма "Управління виробничим підприємством" дозволяє планування,...
-
Загальні відомості Теплова електростанція (ТЕС) - це електростанція, що виробляє електричну енергію в результаті перетворення теплової енергії, що...
-
Невід'ємною частиною життя людини є використання теплової та електричної енергії. Ці види енергії використовуються всіма та в усіх видах діяльності, без...
-
Історія і перспективи розвитку комп'ютерної графіки - Комп'ютерна графіка - погляд у майбутнє
У 1942 р. математик Кембриджського університету Аллан Тьюрінг розробив "Колос" - перший у світі комп'ютер на електронних лампах, який увів людство в...
Алгоритми растрової графіки