Уравновешивание углов сети теодолитных ходов по способу полигонов профессора В. В. Попова - Уравновешивание систем ходов плановой съемочной сети
Задание
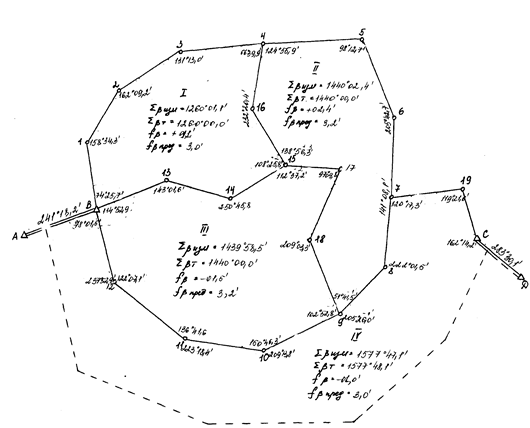
Уравновесить углы и вычислить дирекционные углы сторон сети, изображенной на рисунке 6.
В таблице 15 по вариантам предложены начальный а вех и конечный Оср. дирекционные углы опорных линий АВ и СО.
Таблица 15 Исходные данные
|
№№ вариантов |
Дирекционные углы |
Порядок решения.
Подсчитываем число полигонов, включая и несомкнутый полигон между твердыми (исходными) сторонами АВ и CD.
Исправить непосредственно на схеме полигонов (рисунок б) сумму углов при каждой внутренней узловой точке (15 и 9) для соблюдения условий горизонта (360°), внеся поправки поровну. на каждый угол до десяти долей минуты. Поправки записываем на схеме у соответствующих углов в десятых долях минуты в скобках. Например, поправку +0,1' записываем в виде +1.
Подсчитываем сумму измеренных углов в каждом полигоне с учетом поправок за условие горизонта и записываем ее на схеме внутри соответствующего полигона (см. рисунок б). Несомкнутый полигон IV, включающий твердые линии АВ и CD условно считаем сомкнутыми при помощи пунктирной линии. Число углов, сторон или направлений по этой пунктирной линии в процессе вычислений считается равным нулю.
Под практической суммой углов в каждом полигоне записываем сумму углов теоретическую, причем по полигону IV теоретическую сумму углов следует вычислять по формуле:

(42)
Вычисляем для каждого полигона полученную невязку в сумме углов

(43)
И сравниваем ее с предельной
(44)
Где n - число углов полигона.
Полученные предельные невязки записываем на схеме (см. рис. б) под соответствующими суммами углов в каждом полигоне.
Составляем схему сети теодолитных ходов для уравновешивания углов (рисунок 7). На этой схеме выписываем номера узловых точек и полигонов. Внутри каждого полигона под его номером заготовить табличку невязок и около каждого звена, кроме пунктирного, таблички поправок. В таблички записываем полученные невязки.
Вычисляем красные числа для каждого звена всех полигонов по правилу:
Красное число звена равно числу направлений в звене деленному на число
Направлений в звене, деленному на число направлений в полигоне.
При этом каждую линию в замкнутых полигонах |,||, и ||| а в полигоне IV твердые линии АВ и СD считаем каждую за одно направление. Поэтому на чертеже пунктирная линия, условно замыкающая полигон, вычерчивается у середины твердых линий, включая в полигоне не целые линии, а одно направление. Контроль: сумма красных чисел по каждого полигону должна быть точно равна единице. Красные числа выписать красным цветом под соответствующими табличками.
Распределяем невязки пропорционально красным числам соответствующих полигонов. Начинаем с полигона, имеющего наибольшую по абсолютной величине невязку, умножая, ее последовательно на красные числа звеньев данного полигона и вносим произведения в соответствующие таблички поправок со знаком невязки, с округлением до 0.1г
Подсчитываем алгебраические суммы чисел, а таблицу поправок и записываем их над двойной чертой.
Подсчитываем поправки во внутренние углы каждого полигона по всем звеньям. Для внутренних звеньев сети поправки получаем так: изменяем, знак суммы чисел внешней по отношению к полигону таблички и складываем с суммой чисел внутренней таблички того же знака. Для каждого внешнего звена сети поправка равна итогу внешней таблички с противоположным знаком. Все поправки на звенья записываем в скобках внутри полигона у соответствующих звеньев (см. рис. 7).
Контроль вычислений поправок: их сумма по каждому полигону должна быть равна невязке полигона с обратным знаком.
Таблица 16 Ведомость вычисления дирекционных углов.
|
№№ точек |
Углы |
№ точек |
Углы | ||||
|
Измер |
Исправл. |
Дирекц. |
Измер. |
Исправл. |
Дирекц. | ||
|
1 |
2 |
3 |
4 |
5 |
Б |
7 |
8 |
|
А В
| |||||||
| |||||||
|
C D |
Уравновешивание системы полигонометрических ходов способом последовательных приближений
Задание.
По данным, указанным на схеме полигонометрических ходов (рис. 8, 9), способом последовательных приближений произвести уравновешивание:
- * дирекционных углов узловой линий; * координат узловых точек.
В таблице 17 приведены по вариантам углы при точках № 1,12,16. Остальные углы принять такими же, как и на схеме (см. рис. 8).
Таблица 17 Значения углов № 1,12,16.
|
№ варианта |
Углы | |
|
1 |
12 |
16 |
В таблице 18 приведены суммы приращений координат в звеньях по вариантам.
Таблица 18 Суммы приращений координат по звеньям
|
№ варианта |
Суммы приращений координат | ||||
|
Звено 1 |
Звено 2 |
Звено 3 |
Звено 4 |
Звено 5 |
Звено б |
Порядок уравновешения.
Вычисление дирекционных углов.
На схематическом чертеже (см. рис. 8) у каждого звена выписываем в виде дроби: в числителе номер звена и сумму измеренных углов, в знаменателе - число углов (звеном называют часть хода, заключенного между угловыми линиями или между "твердой" и узловой линией)
По данным, представленным на чертеже, подсчитываем угловые невязки по ходам и замкнутому полигону и выписываем их на чертеж (см. рис. 8). Если угловые невязки не превышают допустимой, то продолжаем вычисление.
Заполняем ведомость вычисления дирекционных углов (таблица 19) в следующем порядке:
- * выписываем исходные данные дирекционные углы "твердых" линий с чертежа сети; * в графу 1 выписываем название узловых линий, для которых вычисляются дирекционные углы; * в графу 2 выписываем наименование начальных (исходных) линий (твердых и узловых) звена, от которых можно вычислить искомые дирекционные углы, при этом в первую очередь выписываем наименование "твердых", исходных сторон; * в графу 3 выписываем номера звеньев примыкающих к соответствующей узловой (искомой) линии, графы 4, 5 и 6 заполняем со схемы ходов в соответствии с их названием; * вычисляем веса дирекционных углов по каждому звену (до 0,01) по формуле:

(46)
Где i = 1,2,3,... "- номер звена;
K - произвольный постоянный коэффициент обычно выбираем так, чтобы веса выражались числами близкими к единице;
Ni - число углов звена.
Для дирекционного угла каждой узловой линии вычисляем сумму весов примыкающих к ней звеньев и определяем веса по формуле:

(47)
Контроль:[Pг]=1
* вычисляем методом последовательных приближений значения дирекционных
Углов узловых линий.
Нулевое приближение для дирекционных углов каждой узловой линии вычисляем непосредственно от " твердой" стороны:
(48)
Нулевое приближение записываем в первых строках каждого блока графы 9 и подчеркиваем;
* для вычисления первого приближения дирекционного угла каждой узловой линии находим значения дирекционного угла этой линии путем передачи от исходных данных по воем примыкающим к ней звеньям. Из полученных значений найти среднее весовое значение (графы 9,10)
(50)
Где б0 - приближенное (наименьшее) значение дирекционного угла узловой линии (взятое до целых минут) из полученных значений по каждому примыкающему звену:
(51)
Это и будет первым приближением.
Аналогично вычисляем второе, а затем и следующие приближения (графы 11,...). При вычислении каждого последующего приближения за исходные данные принимаем самые последние значения приближений.
Приближения заканчиваем, тогда когда последнее вычисленное приближение дает одинаковый результат с предыдущим. Это последнее приближение и является окончательным значением о. Величины еi и б вычисляем до целых секунд;
* для контроля вычислений определяем поправки в углы по звеньям.
(углы левые), (52)
Где б и бi - значения дирекционных углов соответственно узловой линии, записанные в графы последнего приближения, и окончательное. Выполнение равенства:
(53)
Служит контролем правильности вычисления окончательного значения дирекционного угла.
Из-за погрешностей округления У P'iнi может быть не равно нулю, но должна быть

(54)
Значения поправок нi выписать на схему ходов (см. рис. 8) красным цветом над суммой измеренных углов соответствующего звена и произвести подсчет поправок по ходам, имея в виду, что
(55)
Т. е. в случае правых углов знак полученной поправки должен быть изменен на противоположный.
Контроль: сумма поправок по ходу должна быть равна невязке с обратным знаком. Вычисление координат. По данным, указанным на чертеже (рис. 9), подсчитываем линейные невязки по ходам и по замкнутому полигону и выписываем их на чертеже.

(57)

Контроль:

Е) вычисляем нулевые приближения координат узловых точек путем передачи координат по одному звену от твердых точек:
(59)
И записываем в первых строках каждого блока графы 8 таблицы 20.
Ж) аналогично вычисляем, дирекционных углов получаем первые, вторые и т. д.
Приближения координат узловых точек по формулам:
(60)
Где X0 и Y0 - приближенные значения координат узловой точки, взятые до целого центра; X, Y - значения координат узловой точки полученные по каждому звену;
(61)
Значения pi ; ,еx, и еy, вычислить в сантиметрах с округлением до 1 см;
З) для контроля вычислений определяем поправки нx1 и нy1 в суммах приращений по ходам. Эти поправки равны разностям между окончательными значениями координат и значениями, записанными в той же графе, которые получены по отдельным звеньям.
Контролем правильности вычислении среднего весового приращения координат для каждой узловой точки служит равенство:
(62)
Вследствие погрешностей округлений равенство (таблица 62) точно не выполняется, но должно быть

(63)
Поправки в приращениях записываем в графу 14 таблицы 20, а так же выписываем красным цветом на схеме (см. рисунок 9) над соответствующими суммами приращений. Следует иметь ввиду, что знак поправок соответствует приращению хода, указанному стрелкой. Контроль: сумма поправок по отдельным ходам равна невязке с обратным знаком.
Похожие статьи
-
Порядок вычислений в ведомости координат следующий: 1. Выписываем из табл. 1 в графу 1 номера точек; в графу 2 - измеренные горизонтальные углы (); в...
-
Обработка ведомости координат - Геодезическое испытание автомобильных дорог
Цель работы: Составление ведомости координат. Вычисление координат вершин полигона Приборы и оборудование: микрокалькуляторы; таблицы тригонометрических...
-
Городская полигонометрия является опорной геодезической сетью. В больших городах ее прокладывают между пунктами триангуляции, а в малых городах, где...
-
По результатам измерений, полученным при выполнения Задания № 1, а также по исходным данным, выполнить вычисление координат точек теодолитно-высотного...
-
Вначале проверяют все вычисления в полевом журнале. Затем строят схему теодолитного хода, на которую выписывают номера точек теодолитного хода, средние...
-
Основу системы составляет сеть ИСЗ (искусственные спутники земли) развернутых в около земной орбите и равномерно "покрывающих" всю земную поверхность....
-
Для сгущения государственной геодезической сети необходимо запроектировать плановую геодезическую сеть сгущения в виде двух отдельных полигонометрических...
-
По значению углов поворота У, радиусов круговых кривых Р и длин переходных кривых L вычисляют значения элементов кривых, а затем рассчитывают пикетажное...
-
Высоты пунктов съемочной основы вычисляют в следующем порядке: А) в полевом журнале нивелирования делают постраничный контроль: ; Где - сумма задних...
-
Для решения многих задач гораздо удобнее и практичнее перейти от геодезических координат В и L к системе плоских прямоугольных геодезических координат X,...
-
Проектирование и оценка проекта прямой многократной засечки Расчеты выполняются для ОПВ8таблица 4.Б.1. Наименование направлений , км , Т1-ОПВ8 181 30...
-
Расчеты выполняются для ОПВ9 Таблица 4.А.1. Наименование направлений , км , ОПВ9-ПП107 28 30 0,598 2,796389 ОПВ9-Т2 88 00 2,888 0,119896 ОПВ9-ПП110 118...
-
Определение географических координат углов рамки трапеции листа топографической карты масштаба 1:25000 номенклатуры М-39-69-Б-б. 39-номер колонны М-13...
-
Расчет токов короткого замыкания в низковольтных сетях ведем методом именованных единиц, выражая: напряжение в кВ, мощность в кВА, сопротивление в мОм....
-
При подземной теодолитной съемке измеряются левые по ходу горизонтальные углы. В качестве сигналов используются, как правило, шнуровые отвесы,...
-
Понятие о прямой и обратной геодезической задаче Прямая задача: По координатам "Х" у одной точки по дирекционному углу и длине стороны вычисляют...
-
Обработка материалов геометрического нивелирования трассы
Контрольная работа 2. Обработка материалов геометрического нивелирования трассы Геометрическое нивелирование трасса профиль Геометрическое нивелирование...
-
Вычисление координат пунктов теодолитного хода - Теодолитная съемка
Вычисление прямоугольных координат пунктов теодолитного хода основано на решении Прямой Геодезической Задачи . По прямоугольным координатам пункта...
-
ТЕОДОЛИТНАЯ СЪЕМКА - Теодолитная съемка
Теодолитная съемка, как и другие съемки, производится по основному правилу геодезии "от общего к частному", то есть сначала создается съемочная...
-
Вычисление превышений между связующими точками Согласно приведенным отсчетам по двухсторонним рейкам (рис.1), необходимо вычислить превышения связующих...
-
Горизонталь - Понятие и способы расчета азимута
Горизонталь - замкнутая кривая линия, все точки которой имеют одну и ту же высоту над начальной уровенной поверхностью (могут выходить за рамку данного...
-
Способ полярных координат, Способ биполярных координат (засечек) - Теодолитная съемка
Способ полярных координат (полярных направлений)применяется на открытой местности для съемки отдельных местных предметов и характерных точек контуров,...
-
Истинные азимуты - Понятие и способы расчета азимута
Истинный азимут A измеряется от 0° до 360°. Зависимость между истинными азимутами и румбами такая же, как и между дирекционными углами и осевыми румбами....
-
Длина запроектированного теодолитного хода ([s]) составляет 595,624 м. Число сторон в ходе 6. Длины сторон хода: Sp1 - T1 = 62,367 м; Т1 - Т2 = 102,663...
-
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для...
-
В этом разделе необходимо выполнить ранжирование имеющихся показателей. При ранжировании показателей, границы рангов отмечены в таблице № 2. Значения...
-
Вычисление токов короткого замыкания производим для: - сопоставления и выбора наиболее рационального варианта построения схемы электроснабжения -...
-
Создание планового обоснования промплощадки шахты - Маркшейдерские работы и опорные сети
Опорная маркшейдерская сеть промплощадки шахты необходима для решения целого ряда маркшейдерских задач, которые обеспечивают работу шахты: -...
-
1. Инструкция по топографической съемке в масштабах 1:5000; 1:2000; 1:1000; 1:500. ГКИНП-02-033-82 Официальное издание. Москва "Недра" 1985г. (10.8.1 -...
-
Проектирование и оценка проекта теодолитного хода Для определения планового положения опознаков можно применять теодолитные хода. Теодолитные хода при...
-
Сканеры: оптико-механические (сканирующее устройство - быстрокачающееся зеркало, которое, просматривая местность поперек движения носителя, посылает...
-
Масштаб и пространственное разрешение - Обзор современных съемочных аэро - и космических систем
На протяжении всей истории развития аэросъемки показателем детальности изображения на снимках служил масштаб. Аэроснимки‚ как правило‚ подвергаются...
-
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и...
-
ГОСУДАРСТВЕННАЯ ПЛАНОВАЯ ГЕОДЕЗИЧЕСКАЯ СЕТЬ - Геодезическая сеть
Государственная плановая сеть, охватывающая всю территорию Российской федерации, подразделяется по точности на 4 класса: 1-й, 2-й, 3-й и 4-й....
-
Недалеко от проектируемого квартала 11-12-13-14 имеются исходные пункты полигонометрии - 111 -112 и 113 -114. Вынос в натуру поворотных точек квартала...
-
№№ точек Углы Дирекционные углы Горизон-тальные проложения Приращения координат Координаты, м №№ точек Измеренные Исправленные Вычисленные Исправленные Х...
-
ОПРЕДЕЛЕНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ - Выполнение геодезических измерений
Положения объекта в системе прямоугольных координат можно определить приближенно или с точностью, возможной для карты данного масштаба. Основой для этой...
-
Полигонометрия 1 и 2 разряда Проектирование геодезических сетей сгущения на территории промплощадки осуществляется методом проложения ходов...
-
Обработка выписки из тахеометрического журнала - Теодолитная и тахеометрическая съемки
Для определения отметок реечных точек из журналов нивелирования следует выписать отметки станций 3, 5, 6 и согласно этим отметкам вычислить отметки...
-
Пикетажные значения главных точек кривых, полученные по основной формуле, заносятся в ведомость прямых и кривых (прил. 4) и предъявляются преподавателю...
Уравновешивание углов сети теодолитных ходов по способу полигонов профессора В. В. Попова - Уравновешивание систем ходов плановой съемочной сети