Разработка стенда управления, Устройство шаговых двигателей - Разработка стенда управления шаговым двигателем
Устройство шаговых двигателей
Двигатели с переменным магнитным сопротивлением [стр. 4, 2]
Шаговые двигатели с переменным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует. На рисунке 1 представлен двигатель с 4 зубцами на роторе и с 6-ю полюсами на статоре. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 300.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т. е.зубцы ротора будут находиться напротив тех полюсов, на которых запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток.
Таким образом, для реализации постоянного вращения, нужно включать фазы попеременно. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рисунок 2). Чередую-щиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
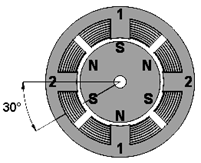
Рисунок 2 -- Двигатель с постоянными магнитами
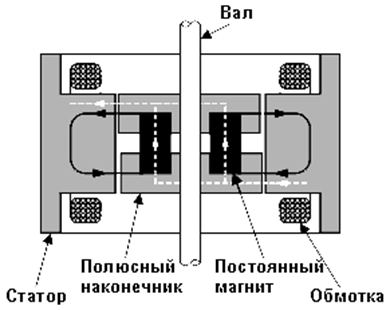
Такой двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 24 - 48 шагов на оборот (угол шага 15 - 7,5 град). Разрез реального шагового двигателя с постоянными магнитами показан на рисунке 3.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
Гибридные Двигатели [стр. 7, 2]
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 - 0.9°). Гибридные двигатели сочетают в себе преимущество двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении.
Ротор разделен на две части, между которыми расположен цилиндри-ческий постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки - южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6°. двигателей и 8 основных полюсов для 1.8- и 0.9°. двигателей. Зубцы ро-тора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Ротор показанного на рисунке 4 двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов - 200, а шаг, соответственно, 1,8°.
Продольное сечение гибридного шагового двигателя показано на рисунке 5. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно из рисунка 5, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке 5 показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его "видит" слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Большинство современных шаговых двигателей являются гибридными. По сути, гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, далее будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3,6° или 1,8°. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Похожие статьи
-
Способы питания шагового двигателя - Разработка стенда управления шаговым двигателем
Для питания обычного двигателя постоянного тока требуется лишь ис-точник постоянного напряжения, а необходимые коммутации обмоток вы-полняются...
-
Способы управления шаговым двигателем - Разработка стенда управления шаговым двигателем
Волновая и фазовая коммутация фаз Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена...
-
Классификация шаговых двигателей - Разработка стенда управления шаговым двигателем
Биполярные и униполярные шаговые двигатели Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля...
-
Разработка структурно-функциональной схемы стенда управления шаговым двигателем Постановка задачи Предметом изучения и объектом управления был выбран...
-
Стабилизация тока и скорость спада тока - Разработка стенда управления шаговым двигателем
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рас-сеиваемую мощность...
-
Способы изменения направления тока - Разработка стенда управления шаговым двигателем
При работе шагового двигателя требуется изменение направления маг-нитного поля независимо для каждой фазы. Изменение направления магнит-ного поля может...
-
Резонанс шагового двигателя - Разработка стенда управления шаговым двигателем
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях....
-
Достоинства и недостатки шагового двигателя - Разработка стенда управления шаговым двигателем
К Достоинствам Шаговых Двигателей можно отнести следующие их особенности: Ь угол поворота ротора определяется числом импульсов, которые поданы на...
-
Введение - Разработка стенда управления шаговым двигателем
Одной из основных компетенций базовой подготовки техника по специальности 230113 "Компьютерные системы и комплексы" является разработка цифровых...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Заключение - Разработка стенда управления шаговым двигателем
В данном дипломном проекте представлен проект стенда управления шаговым двигателем в полушаговом прямом (+)режиме, полушаговом обратном (-)режиме и...
-
Принцип действия асинхронного двигателя - Асинхронный двигатель
В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле....
-
Статор имеет 24 паза, в которые вкладываю пусковую и рабочую обмотку, состоящие из 4 катушечных групп по три катушки. Схема обмотки двухслойная...
-
Проектируемая система адаптивного управления представляет собой комплексную систему автоматического регулирования, состоящую из двух подсистем,...
-
Активное сопротивление обмотки статора Для четырехполюсной машины с неизолированными лобовыми частями: K 1=1,25; B =1 мм. Зубцовое деление, отнесенное к...
-
Схема замещения асинхронного двигателя - Асинхронный двигатель
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и...
-
Основные сведения Коллекторные машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому...
-
Основные понятия - Асинхронный двигатель
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в...
-
В качестве аналога рассматриваемой электромеханической системы (ЭМС) целесообразно рассмотреть ЭМС блока Р16К на базе шагового двигателя с постоянным...
-
Пуск асинхронных двигателей - Асинхронный двигатель
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя....
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
При эксплуатации подвижного состава возникает необходимость ремонта двигателя. Ремонт двигателя может сопровождаться частичной или полной его разборкой....
-
Блок управления реверсивным двигателем
Блок управления реверсивным двигателем В настоящее время практически невозможно указать какую-то отрасль науки и производства, в которой бы не...
-
Как уже отмечалось в современных условиях, для организации ремонта двигателя ЯМЗ-240 рекомендуется не обезличенный поточный способ ремонта, при котором...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Вращающееся магнитное поле. - Асинхронный двигатель
Допустим в начале, что все проводники статора двухполюсного асинхронного двигателя размещены в двух диаметрально расположенных пазах и в обмотке...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
-
Скорость вращения ротора асинхронного двигателя (28-3) Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно...
-
Расчет подчиненного регулирования скорости двигателя постоянного тока
Цель и задачи расчетно-графической работы. В соответствии с кинематической схемой исполнительного механизма (рис. 1) и заданным вариантом требуется: 1)...
-
Механическая характеристика асинхронного двигателя - Асинхронный двигатель
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при...
-
РОТОРЫ, НАЗНАЧЕНИЕ И УСТРОЙСТВО - Буровое оборудование
НАЗНАЧЕНИЕ И УСТРОЙСТВО Роторы предназначены для вращения вертикально подвешенной бурильной колонны с частотой 30300 об/мин при роторном бурении или...
-
Ток якоря двигателя определяется формулой (29.2). Если принять U и неизменными, то ток Iа зависит от противо-ЭДС Еа. Наибольшего значения ток Iа...
-
Потери в стали статора Масса ярма статора: G As =7800- H As - L - K C-р- D A - H As =0,139 кг. Удельные потери в стали 1521 при B =1 Тл и F =400 Гц: P...
-
Устройство машин - Значение электрических машин в Российской Федерации
Как уже указывалось, электрическая машина постоянного тока конструктивно состоит из магнитной системы, создающей магнитное поле, и вращающегося в...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Настройка контроллера и управление контроллером осуществляются через персональный или карманный компьютер при помощи программы "AK2-Service Tool"....
-
В инженерной практике принято промышленные холодильные камеры описывать линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами....
-
Введение - Разработка автоматизированной системы управления промышленной холодильной установкой
Современный уровень производства пищевых продуктов характеризуется с одной стороны увеличением урожайности полей за счет введения новых урожайных сортов...
-
Предлагается конструкция стенда для ремонта У-образных двигателей, основными достоинствами которого является универсальность, простота конструкции,...
Разработка стенда управления, Устройство шаговых двигателей - Разработка стенда управления шаговым двигателем