ОПЫТНО-ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ, Разработка структурно-функциональной схемы стенда управления шаговым двигателем, Возможные неполадки в работе шагового двигателя - Разработка стенда управления шаговым двигателем
Разработка структурно-функциональной схемы стенда управления шаговым двигателем
Постановка задачи
Предметом изучения и объектом управления был выбран униполярный шаговый двигатель, так как именно такой тип двигателя наиболее часто используется в принтерах, сканерах, плоттерах, станках с числовым управлением и в других цифровых устройствах, где требуется точность перемещения и позиционирования.
Ориентировочно, проект стенда должен содержать следующие блоки:
- - Блок А -- блок отработки навыков переключения обмоток униполярного шагового двигателя; - Блок Б -- блок отработки навыков разработки программных модулей для управления различными режимами шагового двигателя.
Структурно-функциональная схема блока отработки навыков переключения обмоток униполярного шагового двигателя -- Блока А
Очевидно, что Блок А должен быть примитивно-простым, но позволяющим получить простейшие навыки управления обмотками униполярного шагового двигателя. В связи с этим, самым простым решением является ручное управление с помощью контактных переключателей, например, с помощью кнопок или реле. Для этого, в среде электронного проектирования Isis Proteus, было проведено исследование1 модели MOTOR-STEPPER из библиотеки Isis Proteus. Библиотечные характеристики этого устройства приведены на рисунке 26.
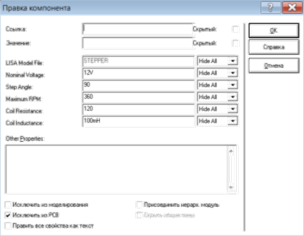
Рисунок 26 -- Библиотечные характеристики примитива Isis Proteus MOTOR-STEPPER -- униполярного шагового двигателя
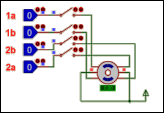
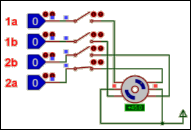
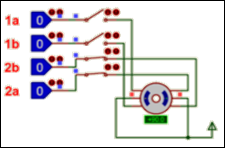
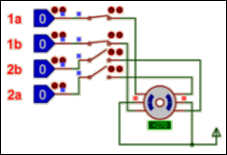
Модель Блока А приведена на рисунке 27.
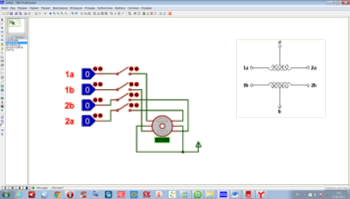
Рисунок 27 -- Модель Блока А, блока ручного управления
В качестве источников импульсов выбраны библиотечные примитивы примитивы Isis Proteus -- логические ноль (меньше 2,5 В) и единица (5 В) -- LOGICSTATE
Основные положения при разработке модели, основанные на анализе теоретической части:
- - При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя; - Одним из распространенных методов коммутации обмоток является метод с перекрытием или метод полушаговой последовательности, при котором двигатель делает шаг в половину основного (в данном случае при шаге 900, половиной шага будет значение 450); - Источником питания для модели выбран примитив внешнего источника питания Isis Proteus POWER (для ручного управления скорость вращения вала не имеет значения)
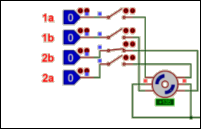
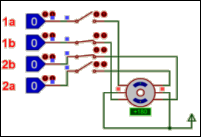
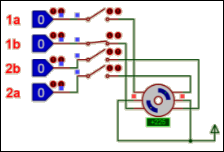
Результаты моделирования (результаты исследования 1) представлены в таблице 1 .
Таблица 1 -- Результаты моделирования ручного управления шаговым двигателем в прямом направлении
|
Скриншоты состояний |
Наименования обмоток, на которые подан ток |
Переключатель(состояние, биты) |
Начальное состояние (все реле -- разомкнуты) | ||
2a |
1000 | |
|
2a2b |
1100 | |
|
2b |
0100 | |
|
2b1b |
0110 | |
|
1b |
0010 | |
|
1b1a |
0011 | |
|
1a |
0001 | |
* При моделировании угол примет значение 360, а затем обнулится |
1a2a |
1001 |
Структурно-функциональная схема блока отработки навыков разработки программных модулей для управления различными режимами шагового двигателя
Центральным узлом такого блока должен быть, очевидно, микроконтроллер, выбор которого предполагает наличие таких характеристик, как стоимость и достаточное количество выводов. В линейке микроконтроллеров AVR фирмы ATMEL таким микроконтроллером является восьмиразрядный микроконтроллер Attiny2313, основные характеристики которого представлены в приложении А [стр. 12, 4]. Для управления униполярным шаговым двигателем необходимо количество выводов, равное четырем, поэтому недорогой и простой в управлении микроконтроллер Attiny2313 подходит по всем характеристикам.
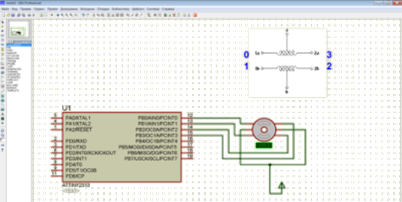
Рисунок 28 -- Модель Блока Б (первый вариант)
Чтобы удостовериться в правильности первого исследования, проведенного по блоку ручного управления, необходимо было провести исследование на тех же битовых значениях сигналов относительно обмоток шагового двигателя (исследование 2) применительно к микроконтроллеру Attiny2313, выбранному в качестве управляющего блока. Исходные значения битов представлены в таблице 3 (в прямом направлении) и в таблице 4 (в обратном направлении):
Таблица 3 -- Исходные значения битов для моделирования полушагового режима в прямом направлении
|
Значение угла поворота |
Наименования обмоток, на которые подан ток |
Битовые значения (для микроконтроллера) | |||||||
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 | ||
|
450 |
2a |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
900 |
2a2b |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
|
1350 |
2b |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
1800 |
2b1b |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
|
2250 |
1b |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
2700 |
1b1a |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
|
3150 |
1a |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
360000 |
1a2a |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
Таблица 4 -- Исходные значения битов для моделирования полушагового режима в обратном направлении
|
Значение угла поворота |
Наименования обмоток, на которые подан ток |
Битовые значения (для микроконтроллера) | |||||||
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 | ||
|
-450 |
1a |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
-900 |
1a1b |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
|
-1350 |
1b |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
-1800 |
1b2b |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
|
-2250 |
2b |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
-2700 |
2b2a |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
|
-3150 |
2a |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
-360000 |
2a1a |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
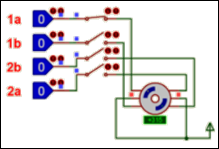
Но, при первом же запуске программы (листинг 1), угол поворота шагового двигателя показал значение -1350 (рисунок 29), вместо значения угла поворота +450. Анализ ситуации показал отсутствие цепи электрического тока (логическая 1 (5v) - ток микроконтроллера направлен навстречу току двигателя, электрическая цепь отсутствует)
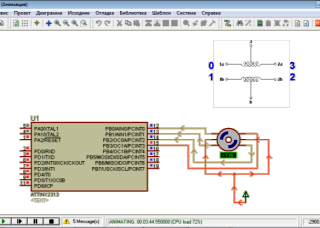
Рисунок 29 - Модель Блока Б - блока управления шаговым двигателем микроконтроллером
Листинг 1 - Программа управления обмоткой 2а шагового двигателя микроконтроллером
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s. r.l.
Project : issled2
Version : 1
Date : 19.06.2015
Author : Freeware, for evaluation and non-commercial use only
Company : xrom
Comments:
Shagmk
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{
PORTB=0b00001000;
Delay_ms(1500);
}
}
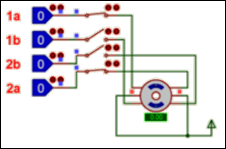
Чтобы создать электрическую цепь, необходимо в 3 бит (4-й пин микроконтроллера) записать 0 (рисунок 30, листинг 2).
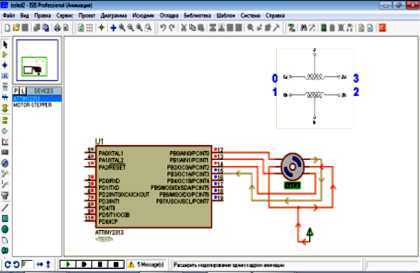
Рисунок 30 - Модель Блока Б - блока управления шаговым двигателем микроконтроллером
Листинг 2 - Программа управления обмоткой 2а шагового двигателя микроконтроллером
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s. r.l.
Project : issled2
Version : 1
Date : 19.06.2015
Author : Freeware, for evaluation and non-commercial use only
Company : xrom
Comments:
Shagmk
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{
PORTB=0b00000111;
Delay_ms(1500);
Полученный результат виртуальной модели удовлетворяет условиям позиционирования угла поворота шагового двигателя: +450. Поэтому таблицы временных битовых комбинаций в прямом направлении (+, Таблица 5, листинг 3) и в обратном (-, Таблица 6, листинг 4) примут следующий вид:
Таблица 5 -- Измененные исходные значения битов для моделирования полушагового режима в обратном (+) направлении
|
Значение угла поворота |
Наименования обмоток, на которые подан ток |
Битовые значения (для микроконтроллера) | |||||||
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 | ||
|
450 |
2a |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
|
900 |
2a2b |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
|
1350 |
2b |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
|
1800 |
2b1b |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
2250 |
1b |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
|
2700 |
1b1a |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
|
3150 |
1a |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
360000 |
1a2a |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s. r.l.
Project : issled2
Version : 1
Date : 19.06.2015
Author : Freeware, for evaluation and non-commercial use only
Company : xrom
Comments:
Shagmk
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{
PORTB=0b00000111;//45 grad
Delay_ms(1500);
PORTB=0b00000011;//90 grad
Delay_ms(1500);
PORTB=0b00001011;//135 grad
Delay_ms(1500);
PORTB=0b00001001;//180 grad
Delay_ms(1500);
PORTB=0b00001101; //225 grad
Delay_ms(1500);
PORTB=0b00001100;//270 grad
Delay_ms(1500);
PORTB=0b00001110;//315 grad
Delay_ms(1500);
PORTB=0b00000110;//360 --> 00 grad
Delay_ms(1500);
}
}
Таблица 6 -- Измененные исходные значения битов для моделирования полушагового режима в обратном (-) направлении
|
Значение угла поворота |
Наименования обмоток, на которые подан ток |
Битовые значения (для микроконтроллера) | |||||||
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 | ||
|
-450 |
1a |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
-900 |
1a1b |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
|
-1350 |
1b |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
|
-1800 |
1b2b |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
-2250 |
2b |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
|
-2700 |
2b2a |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
|
-3150 |
2a |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
|
-360000 |
2a1a |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
Project : issled2
Version : 1
Date : 19.06.2015
Author : Freeware, for evaluation and non-commercial use only
Company : xrom
Comments:
Shagmk
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{
PORTB=0b00011110;//-45 grad
Delay_ms(1500);
PORTB=0b00001100;//-90 grad
Delay_ms(1500);
PORTB=0b00001101;//-135 grad
Delay_ms(1500);
PORTB=0b00001001;//-180 grad
Delay_ms(1500);
PORTB=0b00001011; //-225 grad
Delay_ms(1500);
PORTB=0b00000011;//-270 grad
Delay_ms(1500);
PORTB=0b00000111;//-315 grad
Delay_ms(1500);
PORTB=0b00000110;//-360 --> 00 grad
Delay_ms(1500);
}
}
Полученные и проверенные виртуальные модели и программы управления шаговым двигателем в прямом и обратном направлениях удовлетворяют условиям позиционирований угла поворота шагового двигателя, но для реальной модели может возникнуть ситуация "пробоя" микроконтроллера, особенно, в том случае, когда для увеличения скорости вращения шагового двигателя будет увеличена величина напряжения.
Вывод: большую нагрузку нельзя "напрямую" подключать к микроконтроллеру. В этом случае, нагрузку к микроконтроллеру необходимо подключать через транзистор, используя его как ключ [5].
Исходя из этого, и подобрав сопротивления, модель Блока Б принимает вид, представленный на рисунке 31:
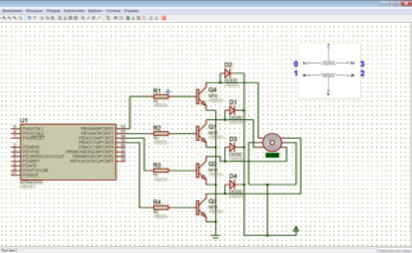
Рисунок 31 - Модель Блока Б - блока управления шаговым двигателем микроконтроллером на транзисторных ключах
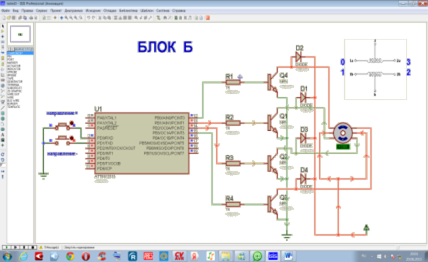
Рисунок 32 - Модель Блока Б - блока управления шаговым двигателем микроконтроллером на транзисторных ключах с кнопками управления
Окончательный вариант Блока Б с добавлением кнопок для управления шаговым двигателем в прямом (+) и обратном (-) направлении представлен на рисунке 32. Программный код управления представлен листингом 5. При этом битовые значения сигналов на соответствующих пинах микроконтроллера соответствуют значениям из таблицы 3 (для прямого (+) направления) и значениям из таблицы 4 (для обратного (-) направления), так как для работы транзистора на базу должно быть подано напряжение (в данном случае 5 В, то есть логическая единица)
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s. r.l.
Http://www. hpinfotech. com
Project : issled3
Version : 1
Date : 20.06.2015
Author : XROMOLUK
Company : XROM
Comments:
Upravl shag dvig
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{if(PIND.0==0)
{
PORTB=0b00001000;
Delay_ms(1500);
PORTB=0b00001100;
Delay_ms(1500);
PORTB=0b00000100;
Delay_ms(1500);
PORTB=0b00000110;
Delay_ms(1500);
PORTB=0b00000010;
Delay_ms(1500);
PORTB=0b00000011;
Delay_ms(1500);
PORTB=0b00000001;
Delay_ms(1500);
PORTB=0b00001001;
Delay_ms(1500);
}
If(PIND.1==0)
{
PORTB=0b00000001;
Delay_ms(1500);
PORTB=0b00000011;
Delay_ms(1500);
PORTB=0b00000010;
Delay_ms(1500);
PORTB=0b00000110;
Delay_ms(1500);
PORTB=0b00000100;
Delay_ms(1500);
PORTB=0b00001100;
Delay_ms(1500);
PORTB=0b00001000;
Delay_ms(1500);
PORTB=0b00001001;
Delay_ms(1500);
}
}
}
Общая структурно-функциональная схема стенда управления шаговым двигателем с добавлением кнопки полного шага в прямом направлении представлена на рисунке 33. Окончательный вариант программы для Блока Б представлен на листинге 6.
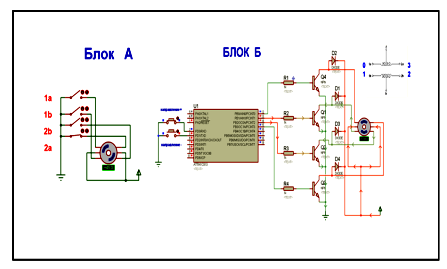
Рисунок 33 -- Проект стенда управления шаговым двигателем
This program was produced by the
CodeWizardAVR V2.05.1b Evaluation
Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s. r.l.
Project : issled3
Version : 1
Date : 20.06.2015
Author : XROMOLUK
Company : XROM
Comments:
Upravl shag dvig
Chip type : ATtiny2313A
AVR Core Clock frequency: 4,000000 MHz
Memory model : Tiny
External RAM size : 0
Data Stack size : 32
#include <tiny2313a. h>
#include <delay. h>
// Declare your global variables here
Void main(void)
{
// Declare your local variables here
// Crystal Oscillator division factor: 1
#pragma optsize-
CLKPR=0x80;
CLKPR=0x00;
#ifdef _OPTIMIZE_SIZE_
#pragma optsize+
#endif
// Input/Output Ports initialization
// Port A initialization
// Func2=In Func1=In Func0=In
// State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=1 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTB=0xFF;
DDRB=0xFF;
// Port D initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0x7F;
DDRD=0x00;
While (1)
{if(PIND.0==0)
{
PORTB=0b00001000;
Delay_ms(1500);
PORTB=0b00001100;
Delay_ms(1500);
PORTB=0b00000100;
Delay_ms(1500);
PORTB=0b00000110;
Delay_ms(1500);
PORTB=0b00000010;
Delay_ms(1500);
PORTB=0b00000011;
Delay_ms(1500);
PORTB=0b00000001;
Delay_ms(1500);
PORTB=0b00001001;
Delay_ms(1500);
}
If(PIND.1==0)
{
PORTB=0b00000001;
Delay_ms(1500);
PORTB=0b00000011;
Delay_ms(1500);
PORTB=0b00000010;
Delay_ms(1500);
PORTB=0b00000110;
Delay_ms(1500);
PORTB=0b00000100;
Delay_ms(1500);
PORTB=0b00001100;
Delay_ms(1500);
PORTB=0b00001000;
Delay_ms(1500);
PORTB=0b00001001;
Delay_ms(1500);
}
If(PIND.2==0)
{
PORTB=0b00001100;
Delay_ms(1500);
PORTB=0b00000110;
Delay_ms(1500);
PORTB=0b00000011;
Delay_ms(1500);
PORTB=0b00001001;
Delay_ms(1500);
}
}
}
Возможные неполадки в работе шагового двигателя
|
Вид неполадки |
Причина |
Рекомендации по устранению |
|
Пропуск шагов |
Некачественный блок управления двигателем (подделка драйвера) |
Заменить драйвер |
|
Неверные настройки драйвера |
Неверно выбранное напря-жение питания и тока. Проверить нас-тройки повторно и отредактировать при необходимости | |
|
Двигатель перегружен |
Нагрузка на двигатель слишком велика. Снизить скорость или поставить двигатель побольше | |
|
Бракованный двигатель |
Прозвонить обмотки, проверить их сопротивление(должно совпадать с паспортным). Проверить вращение вала рукой - при разомкнутых обмотках вал отключенного двигателя должен вращаться легко и беззвучно, при замкнутых накоротко вал крутиться не должен. Заменить двигатель при необходимости. | |
|
Неточноережимов |
Дребезг на контактах управляющих сигналов |
Проверить пайку и изоляцию. При необходимости перепаять и заменить изоляцию |
|
Проблемы с генерацией сигналов |
Заменить драйвер |
Похожие статьи
-
Способы питания шагового двигателя - Разработка стенда управления шаговым двигателем
Для питания обычного двигателя постоянного тока требуется лишь ис-точник постоянного напряжения, а необходимые коммутации обмоток вы-полняются...
-
Способы изменения направления тока - Разработка стенда управления шаговым двигателем
При работе шагового двигателя требуется изменение направления маг-нитного поля независимо для каждой фазы. Изменение направления магнит-ного поля может...
-
Стабилизация тока и скорость спада тока - Разработка стенда управления шаговым двигателем
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рас-сеиваемую мощность...
-
Устройство шаговых двигателей Двигатели с переменным магнитным сопротивлением [стр. 4, 2] Шаговые двигатели с переменным сопротивлением имеют несколько...
-
Способы управления шаговым двигателем - Разработка стенда управления шаговым двигателем
Волновая и фазовая коммутация фаз Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена...
-
Классификация шаговых двигателей - Разработка стенда управления шаговым двигателем
Биполярные и униполярные шаговые двигатели Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля...
-
Достоинства и недостатки шагового двигателя - Разработка стенда управления шаговым двигателем
К Достоинствам Шаговых Двигателей можно отнести следующие их особенности: Ь угол поворота ротора определяется числом импульсов, которые поданы на...
-
Резонанс шагового двигателя - Разработка стенда управления шаговым двигателем
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях....
-
Заключение - Разработка стенда управления шаговым двигателем
В данном дипломном проекте представлен проект стенда управления шаговым двигателем в полушаговом прямом (+)режиме, полушаговом обратном (-)режиме и...
-
Введение - Разработка стенда управления шаговым двигателем
Одной из основных компетенций базовой подготовки техника по специальности 230113 "Компьютерные системы и комплексы" является разработка цифровых...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Блок управления реверсивным двигателем
Блок управления реверсивным двигателем В настоящее время практически невозможно указать какую-то отрасль науки и производства, в которой бы не...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Измерение скорости вращения вала основано на подсчете количества импульсов пришедших с датчика за определенный промежуток времени. В нашем случае за 1...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Описание работы принципиальной схемы - Электрооборудование механизма подъема мостового крана
Для начала работы электротехнический персонал собирает схему, включая автоматические выключатели QF1, QF2, QF3. Одновременно с подачей напряжения...
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
Структурная схема предлагаемого дискретного анализатора частотного спектра сигнала, представленного в [7] как устройство для вычисления модулей...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Холодильная автоматизированная установка состоит из трех компрессоров (КМ), оснащенных устройствами автоматической защиты, маслоотделителя (МО), сборника...
-
Как уже отмечалось в современных условиях, для организации ремонта двигателя ЯМЗ-240 рекомендуется не обезличенный поточный способ ремонта, при котором...
-
И их сравнительный анализ Для реализации данного устройство можно предложить два варианта cтрутурной схемы изображенные на рисунках 1.2 и 1.3 Рисунок...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Где Г - генератор; ССУ - схема синхронизации и управления; УР - управление режимом; СС и У - сигналы синхронизации и управления; МП - микропроцессор;...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Структурная схема После обоснования выбора структурной схемы устройства останавливаемся на схеме с одним дешифратором. Структурная схема приведена на...
-
Статор имеет 24 паза, в которые вкладываю пусковую и рабочую обмотку, состоящие из 4 катушечных групп по три катушки. Схема обмотки двухслойная...
-
При эксплуатации подвижного состава возникает необходимость ремонта двигателя. Ремонт двигателя может сопровождаться частичной или полной его разборкой....
-
Функциональная схема системы автоматизации приведена на рис. Э1. В дополнение к существующим подсистемам включены следующие: АСК концентрации входящей...
-
Устройство управления и синхронизации - Электрическая структурная схема микропроцессорной системы
Базовым интервалом времени, на котором основана синхронизация работы всего микроконтроллера, является машинный цикл. Машинный цикл имеет фиксированную...
-
Разработка структурной схемы системы защиты информации с использованием анализатора частотного спектра сигнала Предлагаемый способ защиты и увеличения...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Определение передаточной функции объекта управления Проведение эксперимента начинают с установки на объекте выбранного режима работы, который...
-
Ток якоря двигателя определяется формулой (29.2). Если принять U и неизменными, то ток Iа зависит от противо-ЭДС Еа. Наибольшего значения ток Iа...
-
Основной частью роторного измельчителя (см. рис.2.4) являются два массивных, горизонтально расположенных ротора (2) установленными в сварном коробе (1)....
ОПЫТНО-ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ, Разработка структурно-функциональной схемы стенда управления шаговым двигателем, Возможные неполадки в работе шагового двигателя - Разработка стенда управления шаговым двигателем