Моделирования автономного инверторного напряжения (АИН) - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
При широтно-импульсной модуляции (ШИМ) последовательность и моменты переключения ключей трехфазного мостового инвертора, определяются равенством мгновенных напряжений задающей и несущей частот (рис.1). Под напряжением задающей частоты понимается трехфазное синусоидальное напряжение, частота которого равна выходной частоте инвертора FВых А напряжение несущей частоты FH имеет пилообразную форму. Отношение амплитуд задающего и пилообразного напряжений называется коэффициентом модуляции кМ. При к"<10 автономный инвертор напряжения (АИН) работает в режиме ШИМ.
Комбинации открытых (1) и закрытых (0) ключей АИН при 180° управлении приведены в табл. 1. Эти комбинации можно представить в виде двоичных кодов, которым соответствуют десятичные числа. Эти числа для всех 60° зон оказываются кратными числу 7=22+21+2°. Для более компактной записи разделим эти десятичные числа на 7 и полученные величины будем называть десятичными кодами.
Для исключения возможности короткого замыкания на входе инвертора при его работе необходимы межкоммутационные паузы, когда открыты только два полупроводниковых прибора. Для этого необходимо открывать очередной ключ с задержкой 5-10мкс, после запирания предыдущего.
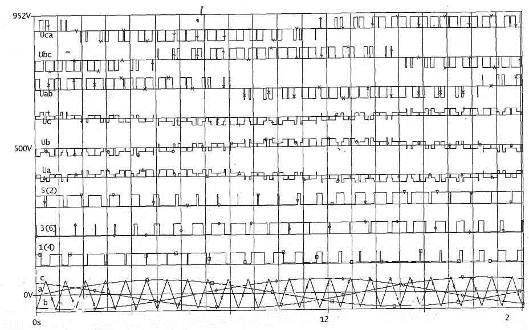
Рис. 4.1. Осциллограммы трехфазного задающего напряжения частотой 50 Гц (а, б, с), напряжений на ключах АИН (1(4), 3(6), 5(2)), фазных (UA UB UC) и линейных (UAb UAc UCa ) напряжений АИН при несущей частоте FН = 1200 Гц коэффициенте модуляции KМ = 1
В алгоритме управления ШИМ для создания пауз дополнительно используются еще два состояния. Открытию всех нечетных ключей инвертора соответствует двоичный код 010101 или десятичное число 21=16+4+1. Открытию всех четных ключей соответствует двоичный код 101010 или десятичное число 42=32+8+2. При делении этих чисел на 7 получаем соответственно десятичные коды 3 и 6.
Таблица 4.1 Порядок работы ключей АИН при 180° алгоритме управления

ШИМ реализуется чередованием комбинаций открытых ключей, которое можно обозначить последовательностью десятичных кодов 3 a b 6 b a, 3 a b 6 b a... . Значения переменных а и b изменяются в каждой 60° зоне в соответствии с рис.4.2. Количество комбинаций 3 a b 6 b а в пределах каждой 60° зоны определяется отношением несущей и выходной частот.

Рис. 4.2 Временная диаграмма для ШИМ
На рис.4.3 показана блок схема реализации предложенного программного способа формирования ШИМ.
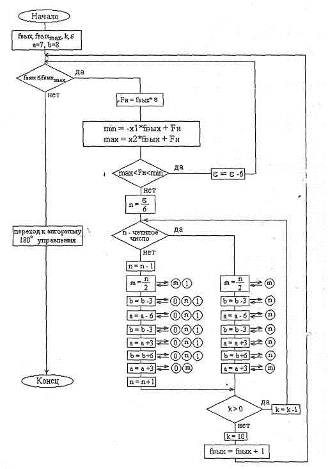
Рис. 4.3 Блок-схема выполнения программы для алгоритма управления широтно-импульсной модуляцией.
В начале алгоритма задаются значения: текущей выходной частоты инвертора fBbIX, максимальной выходной частоты - fBbIX(max), кратности несущей и выходной частот - , количество периодов выходной частоты, проходящих при неизменной кратности частот, начальные значения переменных а=7 и Ь=8, определяющие состояние ключевых элементов в первые 30°.
Выражения min(fВых) и max(fВых) являются уравнениями прямых, ограничивающих значения несущей частоты, где Xi и х2 Коэффициенты, определенные заранее по условиям пуска асинхронного привода, заложенных в алгоритм в виде готовых значений. На рис.4.4 показан пример данной зависимости.
Проверяется условие, что полученное значение несущей частоты находится в интервале между min и max. Если FH выходит за ограничения, то кратность уменьшается на шесть (е = Ј-6) и цикл повторяется до тех пор, пока значение несущей частоты не попадет в требуемый интервал.
Если FH находится в этом интервале, то определяется количество периодов несущей частоты, приходящихся на 60° выходной частоты - п=е/6. По результатам определения количества периодов принимается решение о работе алгоритма управления с четным или нечетным ШИМ.
Для формирования последовательности импульсов управления используется 29 подпрограмм, которые выводят в порт микроконтроллера определенную последовательность импульсов. Подпрограммы №0 и №1 выводят в порт соответственно последовательности 6,а, b и 3,а, b, при этом в качестве переменных а и b выводятся значения, присвоенные им в данный момент. Все остальные подпрограммы выводят в порт последовательность 3,a, b,6,b, a определенное количество раз.
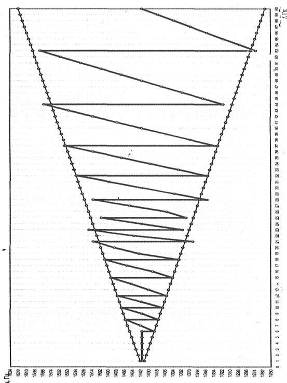
Рис.4.4 График зависимости несущей частоты от выходной, с ограничением возможных значений несущей частоты.
Для обращения к подпрограммам используется ссылка с возвратом. Для четного ШИМ с целью обращения к разным подпрограммам используются переменные n и m. При этом ссылка производится на ту подпрограмму, номер которой в данный момент равен переменным n или m.
Сначала выполняется подпрограмма №0, затем подпрограмма с номером, которому в данный момент равна переменная п, затем выполняется подпрограмма №1. После этого алгоритм возвращается на тот же шаг, с которого была выполнена ссылка. В моменты выполнения подпрограмм формируются сигналы управления ключами АИН.
Разработанный способ программного формирования алгоритма управления ШИМ, с учетом межкоммутационных пауз, заменяет традиционное формирование алгоритмов управления ШИМ аналоговым или табличным способом, а также позволяет уменьшить объем памяти, занимаемый программой управления и увеличить скорость ее выполнения.
При переходе из одной зоны в другую последовательность операций остается неизменной, что позволяет упростить программную реализацию и тем самым повысить надежность и быстродействие систем управления АИН.
Похожие статьи
-
Схемы и работа автономного инверторного напряжения (АИН) На входе АИН (рис. 4.1) устанавливают накопитель энергии в виде конденсатора С большой емкости;...
-
Схемы и работа 4-х квадратных преобразователей ЭПС Электровозы различных типов должны быть максимально унифицированы между собой. Анализ схем и...
-
Эффективность работы электроподвижного, состава с плавным регулированием. напряжения во многом зависит от синхронной работы его преобразователей с...
-
Введение - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
Актуальность темы исследований. Ведущее место в транспортной системе Республики Узбекистан занимают железные дороги. Они имеют важнейшее государственное,...
-
Схемы и работа импульсного регулятор напряжения (ИРН) Принцип работы импульсных преобразователей энергии. Импульсное преобразование энергии достигается...
-
Обзор научные литературы по импульсному регулирование АД Управление - это воздействие на объект, направленное на достижение поставленной цели. Цель...
-
К тяговым электродвигателям (ТЭД) ЭПС предъявляются следующие требования [9,10]: -возможность реализации больших мощностей в ограниченных габаритах;...
-
Типы полупроводниковых диодов - Исследование полупроводниковых диодов
Выпрямительные Диоды используют для выпрямления переменных токов частотой 50 Гц - 100 кГц. В них используется главное свойство p-n-перехода -...
-
Измерения напряжения и тока - Оcновы радиоэлектроники
Измерения тока и напряжения являются основными при исследовании различных устройств и контроле их работы. Однако в радиотехнике преобладающее значение...
-
Преобразователь напряжения переменного тока в ток - Типы преобразователей
Этот преобразователь (рис.20, а) обычно применяют в качестве нормирующего для преобразования в унифицированный токовый сигнал выходного сигнала...
-
- Коэффициент, учитывающий изменение условий охлаждения по длине поверхности корпуса, обдуваемого наружным вентилятором (6 - 341,[1]) : - Коэффициент...
-
- А - Реактивная составляющая тока холостого хода. Электрические потери в статоре при х. х . ( Приближенно ринимаются) , Вт, (6 - 214,[1]) : Активная...
-
Выбор электродвигателя. Для выбора электродвигателя необходимо рассчитать скорость вращения и мощность, при которой будут нормально реализовываться выше...
-
Расчет ротора - Проектирование трехфазного асинхронного двигателя с фазным ротором
Наиболее распространенной обмоткой для фазных роторов является Двухслойная стержневая волновая обмотка. У Читывая выбранный аналог двигателя...
-
Вязкостью называют свойство жидкости оказывать сопротивление взаимному перемещению ее слоев под действием внешней силы. Это сопротивление возникает...
-
Расчет токов и напряжений до коммутации. Докоммутационная схема приведена на рис. 2. Рис. 2 Докоммутационная схема Расчет токов и напряжений в момент...
-
Качество топлива определяется теплотой его сгорания, т. е. количеством теплоты, выделившейся при полном сгорании массовой единицы топлива. В результате...
-
1-3 подъемника грузоподъемностью до 4т 2- компьютерный диагностический комплекс Siemens Vas 5052 Современный диагностический на базе персонального...
-
Изучение характеристик логических элементов ТТЛ
Предварительные расчеты ,,,, , , , , , , , . Для схемы 1 1) напряжение отпирания транзистора Для кремниевых транзисторов напряжения отпирания равно 0.7В...
-
"Интегрирующие АЦП", АЦП многотактного интегрирования - Интегрирующие АЦП
Недостатком рассмотренных выше последовательных АЦП является низкая помехоустойчивость результатов преобразования. Действительно, выборка мгновенного...
-
Аппаратура рельсовых цепей - Блокировка и сигнализация на железнодорожном транспорте
Аппаратура рельсовых цепей размещается централизованно, на прилегающих к перегону станциях. Допускается, при необходимости, размещение аппаратуры всех...
-
Введение, ИОН на стабилитронах - Источники опорного напряжения
В любой схеме стабилизатора требуется наличие опорного напряжения, с которым сравнивается величина выходного напряжения. Стабильность выходного...
-
Точностные параметры - Основные параметры линейных стабилизаторов напряжения
Основное назначение стабилизаторов - поддерживать выходное напряжение неизменным, равным номинальному значению в условиях изменяющегося входного...
-
Рассчитываем крутящий момент двигателя в целом. Для этого выписываем заносим в него ординаты крутящего момента из табл. 14. Суммируем значение ординат...
-
Экспериментальное исследование характеристик устройства - Разработка схем кодера PAL
Целью проведения экспериментального исследование было снятие временных характеристик следующих функциональных узлов цифрового кодера PAL: генератора...
-
Рис.1' Построение внешних скоростных характеристик двигателей сравниваемых автомобилей Трансмиссия автомобиль силовой буксование Внешней скоростной...
-
В состав лабораторной установки входят: - аналоговая вычислительная машина МН-10, на лицевой панели которой набрана электронная модель следящей системы;...
-
Полупроводниковые диоды - Исследование полупроводниковых диодов
Полупроводниковый прибор с одним р-n-переходом, имеющий два омических вывода, называют полупроводниковым диодом (рис.1.4). Одна из областей р-n-структуры...
-
Выбор структурной схемы и назначение блоков состава структуры - ЖК-телевизоры
В состав телевизора 5СЦТ входят следующие функциональные узлы: кассета обработки сигналов КОС (А1); селектор каналов всеволновой СК-1В (А1.1); модуль...
-
Выходные каскады усиления напряжения В качестве выходного каскада усиления напряжения часто используется дифференциальный каскад V1-V2 (оба транзистора...
-
Характеристика производственного участка и технологического процесса по сервисному обслуживанию объекта (Диагностика(д) ТО и ремонт(р). Автосервис имеет...
-
Так как входное напряжение дано в сложном виде, то рассмотрим два промежутка времени: первый от до в течении которого действует напряжение вида , (22) И...
-
Электроснабжение электроподвижного состава
Петрозаводский колледж железнодорожного транспорта - филиал федерального государственного бюджетного образовательного учреждения Высшего...
-
После восстановления и ремонта составных частей необходимо произвести комплектацию деталей с целью обеспечения комплектности для дальнейшей операции...
-
Расчет магнитной цепи - Проектирование трехфазного асинхронного двигателя с фазным ротором
Расчет магнитной цепи проводят для режима холостого хода двигателей, при котором для АД характерно относительно сильное насыщение стали зубцов статора и...
-
Защитное заземление - преднамеренное электрическое соединение с землей или ее эквивалентом металлических нетоковедущих частей, которые могут оказаться...
-
Выбор главных размеров - Проектирование трехфазного асинхронного двигателя с фазным ротором
1. Высота оси вращения (предварительно) по рис. 9.18, Б h = 0,225 м. DA = 0,392 м (см. табл. 9.8). kD = 0,68 по табл. 9.9. 2. Внутренний диаметр статора...
-
Электробезопасность Электричество широко применяется во всех отраслях народного хозяйства, в быту, в медицине и т. д. Поэтому вопросам...
-
При сгорании жидкого топлива число молей всегда несколько увеличивается. Приращение количества продуктов сгорания происходит вследствие увеличения...
-
Цифро-аналоговые преобразователи - Типы преобразователей
Задача заключается в преобразовании величины, которая задана двоичным (или многозначным двоично-десятичным) числом в пропорциональный уровень напряжения...
Моделирования автономного инверторного напряжения (АИН) - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава