Выполнение теоретических исследований по моделированию 4-х квадратного преобразователи, Схемы и работа 4-х квадратных преобразователей ЭПС - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
Схемы и работа 4-х квадратных преобразователей ЭПС
Электровозы различных типов должны быть максимально унифицированы между собой. Анализ схем и конструкций узлов магистральных электровозов постоянного 3 кВ и переменного 25 кВ, 50 Гц токов с асинхронны-ми тяговыми двигателями показывает, что они могут быть унифицированы по многим позициям: тяговым двигателям; некоторым устройствам систем преобразования электроэнергии (инверторам): вспомогательному оборудованию; устройствам зашиты, управления и обеспечения безопасноти; конструкции тележек, силовых передач; устройствам связей кузова с тележками и передачи тягового усилия и др. Такая унификация выгодна и изготовителям электровозов и тем, кто их эксплуатирует, обслуживает и ремонтирует.
Требования к характеристикам перспективных электровозов устанавливаются исходя из того, что основным показателем успешного функционирования и развития железных дорог должна стать минимизация совокупных затрат на единицу полезной работы, а параметры средств тяги являются определяющими для экономики перевозок. Не менее важным при определении параметров средств тяги является необходимость создания оптимального запаса провозной и пропускной способности железных дорог при максимальных вероятных потребностях в перевозках и минимальных инвестициях. Реально обеспечить спрос на транспортные услуги в перспективе можно за счет увеличения веса поездов и скорости их движения [20,21].
Минимизировать расходы в эксплуатации можно несколькими путями:
- 1) повышая единичную (осевую) мощность электровозов до величины, которую можно реально использовать по условию сцепления; 2) снижая повреждаемость и повышая коэффициент готовности; 3) повышая производительность технических средств и обслуживающего персонала; 4) снижая энергозатраты на единицу полезной работы; 5) обеспечивая безопасность персонала и сохранность грузов.
Наиболее рационально эти цели могут быть достигнуты при применении на перспективных элекровозах тягового привода с асинхронными тяговыми двигателями [17,22,23].
Номинальная мощность АТД (осевая мощность) по сравнению с двигателем постоянного (пульсирующего) тока больше в 1,5...2 раза. Эта мощность может быть использована во всем диапазоне скоростей, что делает электровоз с АТД универсальным. Опыт железных дорог ФРГ показывает, что за счет этого парк электровозов может быть уменьшен на 10%, а суточные пробеги увеличены на 35...50% [20,24].
После освоения производства быстродействующих полупроводниковых приборов большой единичной мощности и микропроцессоров с высокой производительностью создание электровозов с АТД стало реальной задачей. Из возможных вариантов силовых схем статических преобразователей частоты и числа фаз для магистральных электровозов переменного тока практически всегда применяют схему с входным 4q-S преобразователем [25] и автономным инвертором напряжения (АИН), а для электровозов постоянного тока - схемы с входным импульсным регулятором и автономным инвертором напряжения [26].
При применении на электровозе переменного тока 4q-S преобразователя с широкоимпульсной модуляцией практически не искажается форма напряжения контактной сети и обеспечивается при изменении нагрузки в широком диапазоне коэффициент мощности, близкий к единице.
В инверторах тока имеют место высокие перенапряжения, что требует применения полупроводниковых элементов более высоких классов и принятия специальных мер защиты. Инвертор тока требует применения во входном фильтре реактора с большей индуктивностью (и массой), имеет более низкий коэффициент мощности по сравнению с АИН [26].
Расчет параметров и выбор полупроводниковых приборов к электрической схеме:
-мощность двигателя:
=1000 кВт;
=1000 A


В. (2.1)
Выбираем тип транзистора для однофазного моста: МТКИ 1200 - 12;
Выбираем тип транзистора для трехфазного моста: МТКИ 1800 - 12.
Четырех квадрантный преобразователь 4Qs - это два моста (однофазный и трехфазный) с транзисторами и обратными диодами, соединенные между собой со стороны постоянного напряжения. Со стороны переменного тока - последовательно включен индуктивный фильтр. Со стороны постоянного напряжения - параллельно включен емкостной фильтр.
Со стороны однофазного моста напряжение контактной сети UКс =const и FКс=const. Со стороны трехфазного моста напряжение АТД UАТД=var и FАТД=var (рис.5.13,а).
Первые образцы четырех квадрантного преобразователя, примененные фирмой Siemens в 1979 году на электровозе Е120, имели одно операционные тиристоры с контурами искусственной коммутации. Название преобразователя объясняется тем, что преобразователь допускает работу в режимах тяги и торможения. Причем ток потребляемый из сети, может, как отставать от напряжения сети, так и опережать его. Если вектор напряжения сети совпадает с положительным направлением вещественной оси, то возможны режимы работы преобразователя, при которых вектор сетевого тока располагается в любом из четырех квадрантов комплексной плоскости.
Режимы работы четырехквадрантного преобразователя приведены в табл. 2.1.
Таблица 2.1
|
Режимы |
Режимы мостов |
Частота модулиру-ющего напряжения | |
|
АТД |
Однофазного |
Трехфазного | |
|
Тяга |
Транзисторы закрыты, неуправляемый выпрямитель, Ed=const |
АИН с ШИМ, регулирование FАТД и UАТД; |
FM=FАТД |
|
Торможение |
ИН с ШИМ, Постоянные частота FС, и действующее значение напряжения U , регулирование угла |
Транзисторы закрыты, неуправляемый выпрямитель, Ed=var За счет измерения скорости АТД |
FM=fС |
Принцип работы четырехквадрантного преобразователя проще рассмотреть на примере режима рекуперации, когда происходит однофазное инвертирование.
Работа однофазного моста в режиме инвертирования:
Постоянное напряжение ED на конденсаторе преобразуется в переменное напряжение UA. При этом происходит чередование следующих режимов:
Открыты два транзистора в противоположных плечах VТ1 и VТ2. Конденсатор разряжается на вторичную обмотку трансформатора с сохранением полярности UA=ED. Ток IA=iD спадает (интервалы времени 1-2, 3-4, 5-6, 7-8, 9-10 на рис. 2.1.)
Открыты два транзистора в смежных плечах VТ1 и VТ3 (интервалы времени 2-3, 6-7, 10-11, 14-15, 18-19 на рис. 21.). Вторичная обмотка трансформатора замкнута накоротко в первом полупериоде через VD3 и VТ1,во втором полупериоде через VD1 и VТ3. Токнарастает. Напряжение на выходе однофазного моста UA=0. Конденсатор заряжается от трехфазного моста и отделен от однофазного, ID=0. Открыты два транзистора в противоположных плечах VТ3 и VТ4. Конденсатор разряжается на вторичную обмотку трансформатора с изменением полярности UA=-ED. Ток IA=-iD спадает (интервалы времени 11-12, 13-14, 15-16, 17-18, 19-20 на рис. 2.1.).
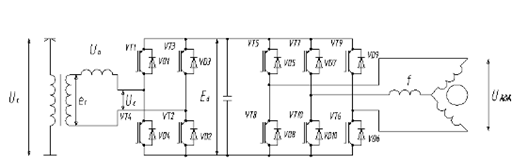
Рис. 2.1 Принципиальная схема четырех квадрантного преобразователя
Открыты два тиристора в смежных плечах VТ2 и VТ4 (интервалы времени 0-1, 4-5, 8-9, 12-13, 16-17 и 20-??? на рис.2. 1.). Вторичная обмотка замкнута накоротко в первом полупериоде через VТ2 и VD4, аво втором, полупериоде через VТ4 и VD2. Как и в случае 3.2, конденсатор заряжается трехфазного моста и отделен от однофазного. Ток IA нарастает, ID=0.
Система управления тиристорами сравнивает напряжения и.
- синусоидальное модулирующее напряжение с частотой, сдвинутое по фазе на угол относительно первой гармоники напряжения на вторичной обмотке трансформатора. Напряжение вырабатывается специальным генератором, позволяющим регулировать угол. (-UМ) - синусоидальное напряжение, сдвинутое на 1800 относительно.
При рекуперации частота модулирующего напряжения равна частоте контактной сети FM=fC , А при тяге - частоте на статоре АТДFM=fАТД.
- пилообразное напряжение симметричной формы с частотой

(2.3)
Достигающее максимума при прохождении модулирующего напряжения через ноль. Отношение частот пилообразного и модулирующего напряжений должно быть равно целому нечетному числу. В нашем примере

.
Условия открытого состояния транзисторов:
- - VТ1: ; - VТ4: ; - VТ3: ; - VТ2: .
Напряжение на вторичной обмотке трансформатора EA можно разложить в ряд Фурье. Амплитуда первой гармоники этого ряда EA1 регулируется глубиной модуляции µ, которая равна отношению амплитуд модулирующего и пилообразного напряжений

(2.4)
При этом
(2.5)
UМ=uМmSIN(2fМT (2.6)
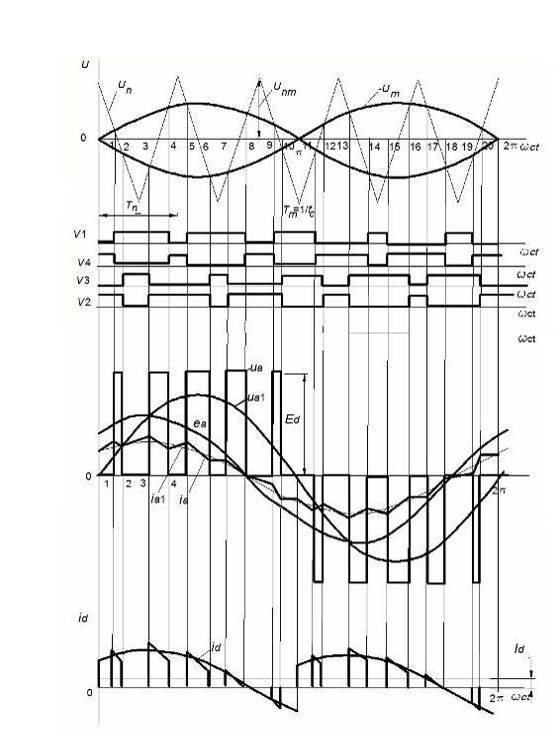
Рис. 2.2 Осциллограмма напряжений и токов
Угол сдвига, А между первыми гармониками тока и напряжения регулируется изменением угла сдвига между модулирующим напряжением и напряжением на вторичной обмотке трансформатора.

Напряжение на первичной обмотке трансформатора равно геометрической сумме напряжения на выходе инвертора и падения напряжения на индуктивности. Регулируя угол сдвига между и можно добиться, чтобы угол А в режиме тяги был равен нулю, а в режиме рекуперации -1800.
Пояснения к рис. 2.2 приведены в таблице 2.2 Работа однофазного моста 4Qs преобразователя в режиме инвертирования
Таблица 2.2
|
Открыты транзисторы |
Проводящие плечи |
Сторона переменного тока |
Сторона постоянного тока |
Интервалы времени по рис. 5.14 | |||
|
UA |
IA |
ED |
ID | ||||
|
VТ1, VТ2 |
Противоположные |
UA=ED |
IA=iD |
Конденсатор С разряжается через однофазный мост на трансформатор |
Id спадает |
1-2, 3-4, 5-6, 7-8, 9-10 | |
|
VТ3, VТ4 |
UA=-ED |
Ia=-id |
11-12,13-14, 15-16, 17-18, 19-20 | ||||
|
VТ1, VТ3 |
Смежные |
Ua=0 К. з. трансформатора Через вентили |
VD3, VТ1 |
Ia нарастает |
Конденсатор С отделен от однофазного моста и заряжается от трехфазного |
Id=0 |
2-3, 6-7, 10-, |
|
VD1, VТ3 |
-11, 14-15, 18-19 | ||||||
|
VТ2, VТ4 |
VТ2, VD4 |
0-1, 4-5, 8-9 | |||||
|
VТ4, VD2 |
12-13, 16-17, 20-2 |
На электрифицированных железных дорогах Узбекистана (переменное напряжение 25 кВ) до последних лет использовались электровозы ВЛ-60 и ВЛ-80. В настоящие время электровозы ВЛ-60 выработали свой ресурс. Для их замены были закуплены электровозы серии "Узбекистан", произведенные на Чжучжоуском электровозостроительном заводе (КНР). Эти электровозы отличаются от ВЛ-60 тем, что на них использованы асинхронные тяговые двигатели и преобразователь частоты для регулирования частоты и напряжения (рис.2.2).
Электровоз оснащен двумя тяговыми преобразователями. Каждый тяговый преобразователь включает: два четырехквадрантных импульсных регулятора; два импульсных инвертора (по одному на каждый тяговый двигатель); один инвертор для питания вспомогательных бортовых потребителей энергии. Во всех компонентах преобразовательной установки в качестве элементной базы использованы биполярные транзисторы с изолированным затвором (IGBT). При питании от контактной сети переменного тока напряжением 15 или 25 кВ тяговый ток поступает к преобразователям, предварительно пройдя через последовательность коммутационных аппаратов, в которую входят разъединитель, переключатель заземления, индуктивный дроссель и главный вакуумный быстродействующий выключатель, на первичную обмотку главного трансформатора. Четырехквадрантные регуляторы 4qS подключены к вторичной обмотке главного трансформатора. Выпрямленный ток от них через промежуточное звено постоянного напряжения проходит к трем импульсным инверторам.
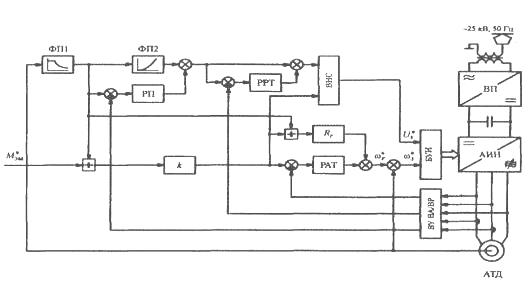
Рис. 2.2 Функциональная схема ТЭП одной оси электропоезда ICE
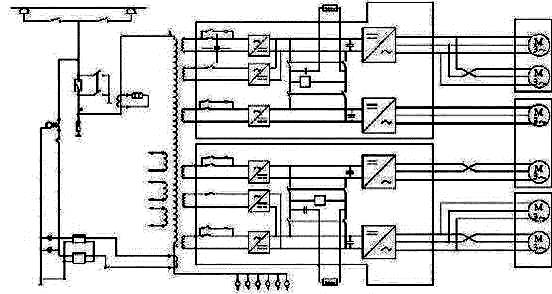
Рис. 2.3 Принципиальная электрическая схема электровоза "Узбекистан"
Каждый инвертор питает трехфазным переменным током тяговые двигатели. Протекание тока возможно как в прямом, так и в обратном направлении, т. е. реализуются режимы как тяги, так и электродинамического торможения.
Итак, на основе выполненного анализа, учитывая особенности работы тяговых двигателей на ЭПС, такие как широкий диапазон изменения нагрузок и рабочих температур; работа в условиях постоянных возмущений, можно сформулировать требования к системам управления асинхронным тяговым приводом перспективного ЭПС, выполнение которых позволят обеспечить наибольший эффект.
Для максимальной реализации потенциальных возможностей двигателя и условий сцепления колеса с рельсом системы управления асинхронным тяговым приводом должны обладать следующими свойствами:
- - максимально учитывать нелинейности характеристики намагничивания; - максимально учитывать температурную нелинейность активного сопротивления ротора; - быть нечувствительными к возмущениям со стороны контактной сети; - быть нечувствительными к возмущениям со стороны нагрузки.
В наибольшей степени этим требованиям соответствуют системы управления, реализующие автоматическое поддержание постоянства магнитного потока - векторное управление.
Похожие статьи
-
Введение - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
Актуальность темы исследований. Ведущее место в транспортной системе Республики Узбекистан занимают железные дороги. Они имеют важнейшее государственное,...
-
К тяговым электродвигателям (ТЭД) ЭПС предъявляются следующие требования [9,10]: -возможность реализации больших мощностей в ограниченных габаритах;...
-
Обзор научные литературы по импульсному регулирование АД Управление - это воздействие на объект, направленное на достижение поставленной цели. Цель...
-
Электрические элементарные преобразователи - Типы преобразователей
Наиболее распространенные электрические элементарные преобразователи рассмотрены в данном разделе. Ими являются: реостат, неуравновешенный мост,...
-
Работа выполняется на двух экспериментальных макетах: № 1 -- выпрямитель, собранный по одно - и двухполупериоднoй схемам; № 2 -- выпрямитель, собранный...
-
Большинство современного подвижного состава оборудовано системами регулирования с помощью реостатов. Во время разгона на каждый пуск расходуется энергия...
-
Контрольные испытания двигателей - Обязанности локомотивной бригады при ведении поезда по участку
Каждая прошедшая ремонт электрическая машина должна пройти контрольные испытания. Порядок проведения таких испытаний должен соответствовать требованиям...
-
Схемы устройств согласования и защиты - Рельсовые цепи тональной частоты
Схема устройства согласования и защиты зависит от решаемых задач (см. п. 2.4.1) и условий применения. Условия применения определяются наличием или...
-
Первые модели автомобилей КамАЗ оснащались генератором Г272. Этот генератор напряжением 28 В имел в обмотках статора в два раза больше витков более...
-
Схема подключения генератора с дополнительным выпрямителем широко применяется на автомобилях ВАЗ. При применении такой схемы на автомобиль не приходится...
-
Для реализации ПУ выберем транзистор КТ503А, который является кремниевым, эпитаксиально-планарным п-р-п универсальным низкочастотным маломощным....
-
Следующим типом интегрирующего АЦП с частотно-импульсным преобразованием, принцип работы которого основан на предварительном преобразовании входного...
-
Исходные данные для расчета: 1. напряжение на выходе каскада = 2,5 В; 2. сопротивление нагрузки = 250 Ом; 3. нижняя граничная частота =120 Гц; 4....
-
Полный вращающий момент двигателя складывается из вращающих моментов, созданных многими парами проводников, лежащих на якоре под разно полярными главными...
-
Цифро-аналоговые преобразователи - Типы преобразователей
Задача заключается в преобразовании величины, которая задана двоичным (или многозначным двоично-десятичным) числом в пропорциональный уровень напряжения...
-
В состав лабораторной установки входят: - аналоговая вычислительная машина МН-10, на лицевой панели которой набрана электронная модель следящей системы;...
-
Буксование электровозов -- явление частое и довольно опасное. Оно возникает, когда сила тяги превысит силу сцепления колес с рельсами, что приводит к...
-
Иccледование последовательного и параллельного колебательных контуров при гармоническом воздействии Цель работы Изучение последовательного и...
-
Электроснабжение электроподвижного состава
Петрозаводский колледж железнодорожного транспорта - филиал федерального государственного бюджетного образовательного учреждения Высшего...
-
Электрическая схема и работа генератора Г-250 - Назначение генератора переменного тока
Генератор Г250 является одним из самых распространенных генераторов и имеет наиболее простую электрическую схему. Электрическая схема этого генератора...
-
В установку входят следующие радиоизмерительные приборы. 1. Звуковой генератор. 2. Генератор стандартных сигналов. 3. Генератор импульсов. 4. Вольтметр...
-
Система подачи топлива предназначена для хранения запаса топлива, очистки топлива и посторонних примесей и для подачи его в цилиндры двигателя. Система...
-
Схемы ЭСЛ _ эмиттерно-связанной логики - Электроника и схемотехника аналоговых устройств
Цифровые микросхемы эмиттерно-связанной логики имеют более высокое быстродействие, чем схемы ТТЛ (даже ценой большей рассеиваемой мощности), достигшее в...
-
Типы полупроводниковых диодов - Исследование полупроводниковых диодов
Выпрямительные Диоды используют для выпрямления переменных токов частотой 50 Гц - 100 кГц. В них используется главное свойство p-n-перехода -...
-
Структурная схема усилителя постоянного тока - Проектирование усилителей электрических сигналов
При проектировании усилителя постоянного тока следует учесть, что его структурная схема состоит из нескольких частей: КП 52.292028.201Э2 Изм. Лист №...
-
Введение - Реверсивный тиристорный преобразователь для электроприводов постоянного тока
Электропривод на основе двигателей постоянного тока используется в различных отраслях промышленности - металлургии, машиностроении, химической, угольной,...
-
Основные типы полупроводниковых преобразователей электрической энергии - Типы преобразователей
К основным типам полупроводниковых преобразователей относятся: - неуправляемые и управляемые выпрямители, ведомые сетью инверторы; - импульсные...
-
Преобразователь напряжения переменного тока в ток - Типы преобразователей
Этот преобразователь (рис.20, а) обычно применяют в качестве нормирующего для преобразования в унифицированный токовый сигнал выходного сигнала...
-
Общая схема технологического процесса диагностирования, ТО и ремонта, технологическая цепочка и маршрутная схема от приема, до сдачи объекта клиенту...
-
Характеристика производственного участка и технологического процесса по сервисному обслуживанию объекта (Диагностика(д) ТО и ремонт(р). Автосервис имеет...
-
Схема централизованного управления производством при методе технологических комплексов приведена в Приложении А. Схема технологического процесса зоны...
-
Различают 4 поколения ГБО. К 1-му поколению относятся механические системы, включающие газовый баллон, редуктор, смеситель, устанавливаемый перед...
-
Объем, предоставляемых автокомплексом, услуг в среднем равен 25550 мелких и крупных ремонтов в год. Это значит, что за один день через комплекс проходит...
-
На основании разработанных этапов работы алгоритма спектрального вычитания и в соответствии ГОСТ 19.701-90 (ИСО 5807-85) "Схемы алгоритмов, программ,...
-
Выбор усилительного полупровдникового прибора Сложность современных радиоэлектронных систем наряду со специфическими радиотехническими требованиями...
-
Измерения напряжения и тока - Оcновы радиоэлектроники
Измерения тока и напряжения являются основными при исследовании различных устройств и контроле их работы. Однако в радиотехнике преобладающее значение...
-
Составные части операционного усилителя - Оcновы радиоэлектроники
Усилитель постоянного тока (УПТ). УПТ отличается от усилителей переменного тока отсутствием каких-либо емкостей. Рис. 2. Простейший усилитель постоянного...
-
Реле промежуточные. - Реле времени, промежуточные и сигнальные реле
Промежуточные реле в схемах максимальных токовых защит и токовых отсечек используются, главным образом, в качестве исполнительного органа (выходного...
-
Трансформаторы - Общая электротехника и электроника
Трансформаторы - это электрические аппараты, предназначенные для преобразования переменного напряжения одной величины в переменное напряжение другой...
-
Назначение генератора переменного тока - Назначение генератора переменного тока
Генератор служит для преобразования механической энергии в электрическую, необходимую для питания всех приборов электрооборудования автомобиля (кроме...
Выполнение теоретических исследований по моделированию 4-х квадратного преобразователи, Схемы и работа 4-х квадратных преобразователей ЭПС - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава