Кинематическая характеристика - Расчет и анализ приводных характеристик навозоуборочного транспортера
Кинематическая характеристика показывает последовательность передачи движения от двигателя к рабочим органам машины и изображается в виде схемы. Она дает сведения о характере движения, величине передаточных отношений, угловой и линейной скорости, позволяет рассчитать траектории движения и возникшие ускорения движущихся масс машины. Кинематическая характеристика позволяет выявить наличие зазоров и оценить их влияние на изменение момента сопротивления и инерции при пуске. Используя передаточные отношения, определяют приведенный момента сопротивления и инерции.
Кинематическая характеристика транспортера заключается в следующем (рисунок 2.2). Ведущая звездочка горизонтального транспортера получает движение от электродвигателя с помощью редуктора и ременной передачи, а наклонный с использованием только редуктора. Скорость движения транспортерной цепи горизонтального транспортера 0,19 м/с, наклонного ? 0,72 м/с. Число зубьев приводной звездочки горизонтальной цепи Z=13, наклонной части Z=6. Зацепление с цепью у горизонтального транспортера осуществляется через зуб. Шаг цепи горизонтального и наклонного транспортеров 0,12 м. Шаг скребков горизонтального транспортеров 1,12м, наклонного ? 0,65м. Усредненная масса одного метра цепи со скребками 6 кг.
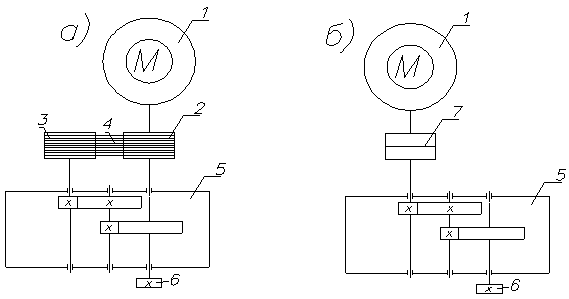
Рисунок 2.2 ? Кинематическая схема горизонтального (а) и наклонного (б) транспортеров: 1 - электродвигатель; 2, 3 - многоручьевые шкивы; 4 - ремни; 5 - редуктор; 6 - приводная звездочка; 7 - соединительная муфта.
Учитывая небольшую частоту вращения приводных звездочек, выбираем для горизонтального транспортера электродвигатель с синхронной частотой вращения 1000 об/мин, для наклонного ? 1500 об/мин.
Для определения передаточного отношения ременной передачи и редуктора определим угловую скорость ведущих звездочек.
Для горизонтального транспортера
, рад/с (2.2.1)
ГдеVЦГ=0,19 ? скорость цепи горизонтального транспортера, м/с;
T=0,12 ? шаг цепи транспортера, м;
ZГ=6 ? число зубьев звездочки, участвующих в зацеплении.
рад/с
Для наклонного транспортера
, рад/с (2.2.2)
ГдеVЦН=0,72 ? скорость цепи наклонного транспортера, м/с;
T=0,12 ? шаг цепи транспортера, м;
ZН=6 ? число зубьев ведущей звездочки.
рад/с
Общее передаточное число для горизонтального транспортера

, (2.2.3)
Где ? синхронная угловая скорость двигателя горизонтального транспортера, рад/с
, рад/с (2.2.4)
Где=1000 ? синхронная частота вращения, об/мин;
.72 рад/с
Передаточное число редуктора наклонного транспортера

, (2.2.5)
Где ? синхронная угловая скорость двигателя наклонного транспортера, рад/с
, рад/с (2.2.6)
Где=1500 ? синхронная частота вращения, об/мин;
рад/с
Учитывая, что для машин длинным тяговым или рабочим органом не рекомендуются червячные редукторы, выбираем для горизонтального и наклонного транспортеров цилиндрические редукторы. Их окончательный выбор будет осуществлен после подсчета передаваемой мощности на быстроходном и тихоходном валу.
Похожие статьи
-
Технологическая характеристика Скребковый навозоуборочный транспортер установлен в двухрядном коровнике (рисунок 2.1) и убирает навоз от 100 коров. Он...
-
Электропривод транспортер навозоуборочный управление Преобладающее количество рабочих машин, применяемых в сельском хозяйстве, имеют электрический привод...
-
Расчет технологии Примерное количество Qcyт (кг) навоза, получаемое на комплексе за сутки, может быть определено по формуле Годовой выход Qгод навоза...
-
Характеристика хозяйства с анализом производственной деятельности Предприятие ООО "Север+" находится в Костромской области, Октябрьского района, с....
-
Показатели травматизма на разрезе за время с 2013 по 2015 годы включительно, отражены в таблице 4.1. В таблице показаны параметры, рассчитанные по...
-
Взамен транспортеров ТСН-ЗБ и ТСН-2 промышленность начала выпуск новых, более совершенных транспортеров ТСН-160, основным отличием которых является...
-
Установление исходных данных для расчета Марка трактора - Т-150К; Технологическая операция - посев по ресурсосберегающей технологии; Марка СХМ - посевной...
-
1. Количество перевозимого корма в течение суток -Зимний период QК=?mI*qI=6000*6,796=40776 кг -Летний период QК=?mI*qI=6000*2,778=16668 кг MI -...
-
С учетом диаметра вала в месте посадки подшипника принимаем шариковый радиальный однорядный подшипник № 80204 закрытого типа (по ГОСТ 7242-81). У...
-
Машинно-тракторный агрегат комплектуется с учетом следующих факторов: 1. Наиболее полной используемой мощности трактора. 2. Максимальной...
-
Силовым электрооборудованием зерноочистительно-сушильного комплекса является электродвигатели, которые используются в приводах технологического...
-
Характеристика рынка недвижимости Ханты-Мансийского автономного округа В Ханты-Мансийском автономном округе рынок недвижимости развивается хорошо....
-
Рыночная стоимость - это наиболее вероятная цена продажи участка на конкурентном и открытом рынке при осознанных и рациональных действиях в своих...
-
Сравнительно-морфологический метод. С помощью этого метода изучали макроструктуру роз, проводя морфологический анализ вегетативных органов, соцветий,...
-
Общая площадь приточных каналов берется 20-70 % от общей площади всех вытяжных труб, а для Севера-Запада (Ленинградской области) она составляет 50%, т. е...
-
Массовые диагностические исследования запланированы по следующим болезням: туберкулез, бруцеллез и лейкоз крупного рогатого скота и сап лошадей....
-
Местонахождение лесничества ГКУ ПО "Кададинское лесничество" расположено в восточной части Пензенской области, на территории Сосновоборского и Кузнецкого...
-
Исходя из поголовья согласно заданию, рассчитаем структуру поголовья фермы (таблица 1.2.1) . Таблица 1.2.1 Структура поголовья фермы КРС, % Группы...
-
Анализ исходных характеристик территории. Выбор территории под застройку. Общая схема планировки является эскизным решением архитектурно - планировочной...
-
Местоположение. Социально-экономическая и территориальная характеристика. Населенный пункт - Усьва расположен на севере Пермского края, в112 км к северу...
-
Общая характеристика СПК "Зимницкий" СПК "Зимницкий" был основан в 8 апреля 1993 г. Юридический адрес: 242750, Брянская область, Дубровский район, д....
-
Расположение станков четырехрядное, с устройством между средними рядами сплошной стены и между крайними и средними рядами - общих кормовых проходов. В...
-
Не смотря на то, что сахаристый сок можно получать от многих древесных растений, в нашей стране основным его источником является береза. Принимая это во...
-
В составе здания основного назначения есть следующие помещения : А) помещение для телят Б) молочная В) моечная Г) помещение для хранения текущего запаса...
-
Основы теории и расчет сепараторов - Механизация первичной обработки молока
Основы теории и расчет сепараторов разработали советские ученые Г. А. Кук, Г. И. Бремер, Н. Я. Лукьянов и др. Физическая сущность процесса сепарирования...
-
Барабанный подборщик с пружинными пальцами. Основными условиями качественной работы подборщика являются частота подбора валка, непрерывность поступления...
-
Производительность горизонтального шнекового смесителя определяется, как и обычного шнека, с той лишь разницей, что заполнение смесителя должно быть...
-
Производительность ВТМ ЛП-58 Для расчета производительности ВТМ необходимо установить объем трелюемой пачки деревьев. Масса трелюемой пачки будет...
-
Исходными данными для выполнения расчетов является производительность Q (т/час), масса корма, размещенная на 1 м2 поверхности вальца G, Энергоемкость Е....
-
Краткая техническая характеристика машины и обоснование модернизации Дробилка кормов универсальная КДУ-2,0 (рисунок 4.1) предназначена для измельчения...
-
Предварительное охлаждение молока искусственным холодом. - Обзор и анализ систем охлаждения молока
Эта система мгновенного охлаждения молока позволяет нам повысить качество молока. Она проста по конструкции и не требует больших затрат на обслуживание....
-
Стационарные доильные установки подразделяются на установки для доения коров в переносные ведра и в молокопровод при привязном содержании животных...
-
В данном курсовом проекте для выполнения основных работ на лесосеке применяются укрупненные комплексные бригады (УКБ) и функциональные бригады (звенья)....
-
Тягово-приводной агрегат, как правило, состоит из трактора и сельхозмашины. В этом случае расчет сводится к определению суммарных затрат мощности...
-
Расчет производительности агрегатов Производительность агрегата - это работа, выполненная агрегатом в единицу времени (час, смену, сезон). Для мобильных...
-
Номинальные (нормальные) тяговые усилия трактора с учетом потерь силы тяги на преодоление склона. , Где mэ. , mк. - эксплуатационная и конструктивная...
-
Введение, Льнотеребилки: общая характеристика - Механизация уборки льна
Уборка льна -- наиболее трудоемкий процесс, затраты труда на нее составляют 30--50% общих затрат труда в льноводстве. Чтобы получить льнопродукцию...
-
Управление ветеринарии находится в черте города Кызыла, в восточном районе, по улице Оюна-Курседи 6а, и относится к министерству сельского хозяйства и...
-
Анализ охраны, защиты, воспроизводства лесов и источников их финансирования Арендаторы лесного фонда и ООО "Кададинское лесное хозяйство" осуществляют...
-
Ландшафтный анализ территории - Ландшафтная характеристика Голышмановского района Тюменской области
На территории Голышмановского района преобладают следующие виды ландшафтов: Ландшафты дренированных равнин Озерные с покровом лессовидных суглинков...
Кинематическая характеристика - Расчет и анализ приводных характеристик навозоуборочного транспортера