Нечеткие множества в системах управления, Общая структура нечеткого микроконтроллера - Нечеткая логика
Наиболее важным применением теории нечетких множеств являются контроллеры нечеткой логики. Их функционирование несколько отличается от работы обычных контроллеров; для описания системы вместо дифференционных уравнений используются знания экспертов. Эти знания могут быть выражены с помощью лингвистических переменных, которые описаны нечеткими множествами.
Общая структура нечеткого микроконтроллера
Общая структура микроконтроллера, использующего нечеткую логику, показана на рис.1. Она содержит:
- - блок фаззификации; - базу знаний; - блок решений; - блок дефаззификации.
Блок фаззификации преобразует четкие величины, измеренные на выходе объекта управления, в нечеткие величины, которые описаны лингвистическими переменными в базе знаний.
Блок решений использует нечеткие условные ( if - then ) правила, заложенные в базу знаний, для преобразования нечетких входных данных в необходимые управляющие влияния, которые также носят нечеткий характер.
Блок дефаззификации превращает нечеткие данные с выхода блока решений в четкую величину, которая используется для управления объектом.

Рис. 1. Общая структура нечеткого микроконтроллера
В качестве примера известных микроконтроллеров, использующих нечеткую логику можно назвать 68HC11, 68HC12 фирмы Motorola, MCS-96 фирмы Intel, а также некоторые другие.
Все системы с нечеткой логикой функционируют по одному принципу: показания измерительных приборов: фаззифицируются (превращаются в нечеткий формат), обрабатываются, дефаззифицируются и в виде обычных сигналов подаются на исполнительные устройства.
Рассмотрим случай управления мобильным роботом, задачей которого является объезд препятствий. Введем две лингвистические переменные: ДИСТАНЦИЯ (расстояние от робота до препятствия) и НАПРАВЛЕНИЕ (угол между продольной осью робота и направлением к препятствию).
Рассмотрим лингвистическую переменную ДИСТАНЦИЯ. Ее значения можно определить термами ДАЛЕКО, СРЕДНЕ, БЛИЗКО и ОЧЕНЬ БЛИЗКО. Для физической реализации лингвистической переменной необходимо определить точные физические значения термов этой переменной. Пусть переменная ДИСТАНЦИЯ может принимать любые значения из диапазона от нуля до бесконечности. Согласно теории нечетких множеств, в таком случае каждому значению расстояния из указанного диапазона может быть поставлено в соответствие некоторое число от нуля до единицы, которая определяет степень принадлежности данного физического расстояния (допустим 40 см) до того или другого терма лингвистической переменной ДИСТАНЦИЯ. Степень принадлежности определяем функцией принадлежности М(d), где d - расстояние до препятствия. В нашем случае расстояние 40 см. Можно задать степень принадлежности до терма ОЧЕНЬ БЛИЗКО равное 0,7 , а до терма БЛИЗКО - 0,3 (рис. 2.). Конкретное определение степени принадлежности проходит только при работе с экспертами.
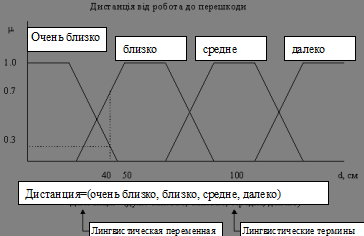
Рис. 2. Лингвистическая переменная и функция принадлежности
Переменной НАПРАВЛЕНИЕ, которая принимает значения в диапазоне от 0 до 360 градусов, зададим термы ЛЕВЫЙ, ПРЯМОЙ и ПРАВЫЙ.
Теперь необходимо задать исходные переменные. В данном примере достаточно одной, которую назовем РУЛЕВОЙ УГОЛ. Она может содержать термы: РЕЗКО ВЛЕВО, ВЛЕВО, ПРЯМО, ВПРАВО, РЕЗКО ВПРАВО. Связь между входом и выходом запоминается в таблице нечетких правил.
Таблица нечетких правил
|
Дистанция | |||||
|
Очень близко |
Близко |
Средне |
Далеко | ||
|
Направление |
Правый |
Резко влево |
Резко влево |
Влево |
Прямо |
|
Прямой |
Резко влево |
Влево |
Влево |
Прямо | |
|
Левый |
Резко вправо |
Резко вправо |
Вправо |
Прямо |
Каждая запись в данной таблице соответствует своему нечеткому правилу, например "Если дистанция близко и направление правое, тогда рулевой угол резко влево".
Таким образом, мобильный робот с нечеткой логикой будет работать по следующему принципу: данные от сенсоров про расстояние до препятствия и направление к нему будут фаззифицированы, обработаны согласно табличным правилам, дефаззифицированы, и полученные данные, в виде управляющих сигналов поступают на приводы робота.
Похожие статьи
-
Нечеткими высказываниями будем называть высказывания следующего вида: 1. Высказывание , где ? - имя лингвистической переменной, ?' - ее значение,...
-
Преимущества нечетких систем, Применение нечетких систем - Нечеткая логика
Коротко перечислим преимущества fuzzy-систем по сравнению с другими: - возможность оперировать нечеткими входными данными: например, непрерывно...
-
Операции над нечеткими множествами - Нечеткая логика
Содержание Пусть A и B - нечеткие множества на универсальном множестве E. Говорят, что A содержится в B, если ?x ?E ?A(x) <?B(x)....
-
Методы построения функций принадлежности нечетких множеств - Нечеткая логика
В приведенных выше примерах использованы прямые методы, когда эксперт или просто задает для любого x?E значение ?A(x), или определяет функцию...
-
Пусть эксперт определяет толщину изделия, с помощью понятия "маленькая толщина", "средняя толщина" и "большая толщина", при этом минимальная толщина...
-
Нечеткая и лингвистическая переменные - Нечеткая логика
При описании объектов и явлений с помощью нечетких множеств используется понятие нечеткой и лингвистической переменных. Нечеткая переменная...
-
Основные характеристики нечетких множеств, Примеры нечетких множеств - Нечеткая логика
Пусть M = [0,1] и A - нечеткое множество с элементами из универсального множества E и множеством принадлежностей M - Величина ?A(x) называется...
-
Пусть: A = 0,4/ x1 + 0,2/ x2+0/ x3+1/ x4; B = 0,7/ x1+0,9/ x2+0,1/ x3+1/ x4; C = 0,1/ x1+1/ x2+0,2/ x3+0,9/ x4. Здесь: 1. A?B, то есть A содержится в...
-
Задача кластеризации реализуется набором методов (алгоритмов), каждый из которых осуществляет разбиения региона на компактные зоны обслуживания. Аппарат...
-
В данной главе описан способ прогнозирования с помощью НС, основанный на методе окон. Также приведен обзор применения НС в финансовой сфере. Общий подход...
-
Аппроксимация функции предпочтения ЛПР нейронными сетями имеет в работе ту особенность, что процесс обучения нейронных сетей происходит в условиях малой...
-
СТРУКТУРЫ УПРАВЛЕНИЯ ЛОГИСТИЧЕСКИМИ СИСТЕМАМИ - Понятие и виды логистической системы
Объектом логистическими системами, как известно является сквозной материальный поток, тем не менее на отдельных участках управление им имеет известную...
-
Прогнозирование курса Ukb/Usd, Общий подход к прогнозированию курса UKB/USD - Прогнозирующие системы
В данной главе описаны эксперименты по прогнозированию курса американского доллара по отношению к украинскому карбованцу (UKB/USD). Сначала описаны...
-
Модель в общем смысле (обобщенная модель) есть создаваемый с целью получения и (или) хранения информации специфический объект (в форме мысленного образа,...
-
Основные направления совершенствования организационной структуры предприятия ОАО "Огонек". Любую перестройку структуры управления необходимо оценивать, в...
-
СПОСОБЫ ОПИСАНИЯ СТРУКТУР. МОРФОЛОГИЯ СОЦИАЛЬНО-ПОЛИТИЧЕСКОЙ И ЭКОНОМИЧЕСКОЙ СФЕР Структурное моделирование. Структурный анализ Основная цель...
-
Часто оказывается, что входные величины, приложенные к системе, имеют стохастический характер. В этом случае нельзя использовать детерминированные...
-
Программное управление является приемлемым подходом во многих прикладных ситуациях. На этом принципе основаны, например, простые металлорежущие станки...
-
Система химии, логика ее развития и построения Что такое химия? Химия является высокоупорядоченной - постоянно развивающейся системой знаний о веществах,...
-
Функциональные свойства систем - Системная революция и принцип дуального управления
Функциональная полнота системы определяет степень соответствия системы функций, выполняемых системой, множеству функций, выполнение которых необходимо с...
-
При управлении подвижными объектами (такими, например, как мобильные роботы, подводные аппараты и т. п.) часто имеет место неопределенность цели, когда...
-
Счетные и несчетные множества - Методы решения системы линейных уравнений
Пусть, например, А и В Ї некоторые множества. Тогда их возможные взаимоотношения можно рассмотреть в виде таблицы: Диаграмма Венна Диаграмма Венна...
-
Для заданного региона обслуживания с помощью технологии ГИС предоставляется карта автомобильных дорог, на которой указаны пункты, соответствующие...
-
Статистические испытания схемы проводятся исходя из того, что генерирование случайных логических переменных xI проводится с помощью равномерного...
-
Общие принципы системной организации - Математическое описание объектов управления
Естественно, что решение задач управления, получение законов управления базируется на некоторых формально-математических основах, образующих теорию...
-
Основные понятия и определения проблемы прогнозирования - Прогнозирующие системы
Необходимо отметить, что мы рассматриваем прогнозирование в целях планирования производства или управления запасами. Таким образом, наш интерес лежит в...
-
Методы прогнозирования - Прогнозирующие системы
Методы прогнозирования можно разделить на два класса квалитативные и квантитативные, в зависимости от того, какие математические методы используются....
-
Построим теперь на базе полиинтервальной оценки такую теоретико-вероятностную модель представления экспертных знаний, которая сочетала бы в себе описание...
-
Модель "вход - выход" для нестационарной системы управления можно представить в следующем виде [2] . Где коэффициенты матриц возмущения и ограничены...
-
Реализация интеллектуальных систем поддержки решений (ИСППР) в задачах оценки перспективности объектов природопользования на ранних стадиях их...
-
В качестве примера конкретной модели процесса управления обсудим модель распределения времени между овладением знаниями и развитием умений, впервые...
-
Моделирование процессов управления предполагает последовательное осуществление трех этапов исследования. Первый - от исходной практической проблемы до...
-
Математическое моделирование экономических явлений и процессов с целью оптимизации процессов управления - область научно-практической деятельности,...
-
Понятие и структура экономической системы. - Моделирование экономических систем
Употребление понятия системы имеет долгую историю, уходящую в античную эпоху. В переводе с греческого "система" означает некое целое, состоящее из...
-
Конкретные модели процессов управления в социальных и экономических системах исходят из общей методологии, которую и формулируем в настоящей статье....
-
Основные понятия теории экономико-математического моделирования Кибернетический подход к исследованию экономико-математических систем Обычно...
-
Структурная целостность (связность) В системно-физическом плане внутренняя связность (связность) системы проявляется в наличии внутренних...
-
На сегодняшний день основным видом деятельности ОАО "Огонек" является розничная торговля. В процессе труда человек вступает во взаимодействие с...
-
Система управление и его основные элементы С раннего детства человеку знакомо понятие "управление". Сначала мы сталкиваемся с управлением автомобилем,...
-
Равноускоренное (равнозамедленное) развитие. Этому типу динамики свойственно постоянное во времени увеличение (замедление) развития. Уровни таких рядов...
Нечеткие множества в системах управления, Общая структура нечеткого микроконтроллера - Нечеткая логика