Методы решения задач оптимизации в АСУ - Автоматизированные системы обработки информации и управления на автомобильном транспорте
Математическое обеспечение позволяет использовать методы автоматизированного поиска оптимальных вариантов при проектировании системы.
Часто при решении задач оптимизации одновременно используются несколько критериев (многокритериальность). Оптимизация параметров за счет выделения одной из критериальных функций в ранг целевой не всегда приносит желаемые результаты. В этом случае можно использовать либо процедурную декомпозицию, либо последовательно совершенствовать проектируемую АСУ, сменяя критериальные ограничения. Неоднородность и высокая размерность пространства поиска также вызывают необходимость декомпозиционного подхода к проектированию АСУ. К указанным факторам, как правило, добавляется дискретность переменных и нелинейность целевой функции. Количество переменных достигает порядка нескольких тысяч, что исключает возможность использования полного перебора. Неприемлем также подход, заключающийся в решении соответствующей непрерывной задачи с последующим округлением нецелоисчисленных компонент до ближайших целых значений.
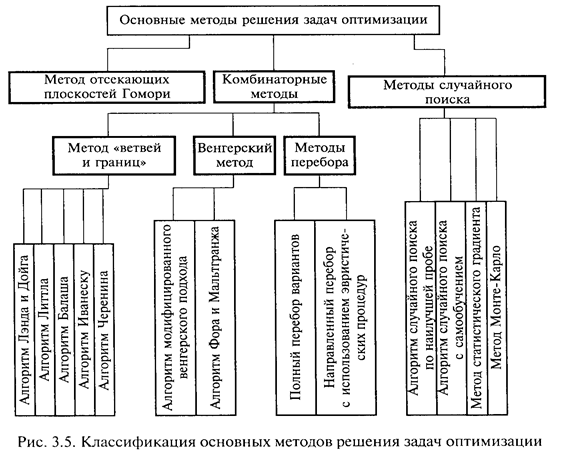
В качестве решения может быть использован метод замены целевой функции с ее кусочно-линейной аппросимакцией и последующее решение задачи методом отсекающих плоскостей Гомори. Однако возможности использования алгоритмов Гомори ограничиваются тем, что формирование правильного отсечения сопряжено с определенными трудностями и быстрым ростом размерности задачи за счет новых ограничений. Кроме того, полученное решение представляет собой лишь аппроксимацию оптимального решения.
Использование методов, основанных на идее метода "ветвей и границ", требует построения правил ветвления и вычисления оценок получаемых множеств, которые сильно зависят от особенностей рассматриваемой задачи. Хотя эти методы весьма эффективны в вычислительном отношении, не во всех случаях удается получить эффективные правила ветвления и вычисления оценок.
Наибольшее распространение при решении задач с большим числом переменных получили приближенные методы и, в первую очередь, методы направленного поиска с использованием декомпозиции и разнообразных эвристических приемов. Вместе с тем можно считать целесообразным поиск новых эвристических процедур, существенно сокращающих число возможных вариантов перебора и упрощающих процесс оценки получаемых вариантов. Очевидно, что такие процедуры должны основываться на физическом смысле задачи и ее особенностях (рис. 3.5).
Большая размерность и высокая сложность задач, решаемых на этапе системного программирования, дискретность переменных, неразработанность соответствующих математических моделей и методов, а также сложность получения выражения целевой функции определяют необходимость разработки новых методов и алгоритмов.
Анализ показывает, что единственно возможным в данном случае является декомпозиционный подход к решению задач этапа системного проектирования. Основная идея декомпозиционного подхода состоит в последовательной оптимизации по одному из управляемых параметров при ограничениях на остальные управляемые параметры. Использование декомпозиционного подхода к проектированию АСУ позволяет существенно упростить задачу проектировщиков. При таком подходе задачи проектирования подсети связи и подсети вычислительных ресурсов и пользователей решаются в соответствии с принципом покомпонентного спуска, обеспечивающим поочередное решение частных задач и установления связи между ними. При этом полученное решение является субоптимальным. Сложность получения точного решения определяется, с одной стороны, недостаточностью задания исходных данных и, с другой стороны, следует из того факта, что для решения общей задачи проектирования используется ее декомпозиция на подзадачи. При этом оптимизация каждой подзадачи Sh i = = 1,...,/ из множества всех подзадач приводит к субоптимальным решениям задачи S*, составленной из всех этих подзадач.
Если при решении частных задач принципиально возможно использование универсальных математических методов, то разработка процедур координации необходима при проектировании каждой конкретной системы. Именно поэтому вопросы координации решений, получаемых при проектировании каждой из подсистем АСУ, наиболее сложны и в настоящее время проработаны недостаточно полно.
Попытка синтеза АСУ сразу по всем параметрам с учетом всех ограничителей нереальна как по объему информации, так и по трудоемкости вычислительных работ. Методология синтеза АСУ представляет собой разбиение общих задач проектирования на ряд взаимосвязанных подзадач, установление информационного обмена и последовательности их выполнения.
Основная трудность заключается в нахождении компромисса между простотой описания и необходимостью учета многочисленных характеристик АСУ. Решение этой проблемы заключается в иерархическом описании, при котором система представляется семейством моделей, каждая из которых описывает поведение системы на различных уровнях абстракции. Для эффективности такого описания системы необходима наибольшая независимость моделей для различных уровней. Рассмотренные выше обстоятельства приводят к схеме структурно-процедурной вложенности задач проектирования АСУ (рис. 3.6).
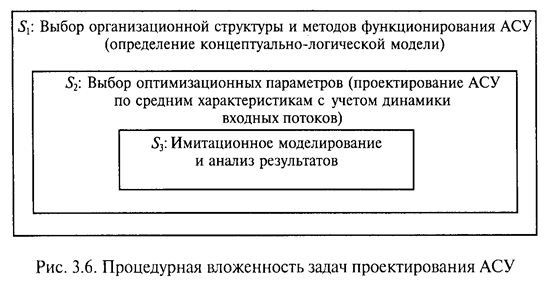
В задаче верхнего уровня 5, при заданных требованиях к функционированию следует определить общие принципы построения АСУ, которые в дальнейшем позволяют сформулировать математическую модель АСУ. В задаче второго уровня в условиях известных входных воздействий и общих принципов функционирования требуется синтезировать оптимальные параметры АСУ. В задаче третьего уровня требуется проанализировать выбранные параметры АСУ на соответствие заданным критериям, используя метод имитационного моделирования.
Понятие вложенности процессов проектирования в данном случае отражает строгую последовательность решения задач и степень конкретизации принимаемых решений.
После подобной неформальной декомпозиции проблема декомпозиции не снимается, а подчиняется новым требованиям обеспечения автоматизированного поиска решений с использованием формальных процедур.
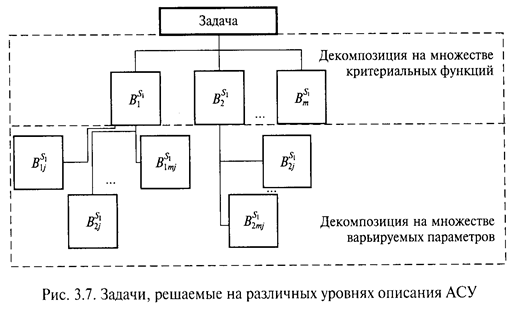
Рассмотрим более подробно задачу S1. Наличие нескольких критериев, которые в данном случае невозможно свести к одному функциональному критерию, и неоднородность пространства варьируемых параметров обусловливают дальнейшую декомпозицию, реализуемую на принципах однородности критериальных функций и пространства поиска. Над задачей S1 проводится формальная декомпозиция на ВР, р = 1,...,m блоков, в функции каждого из которых входит расчет одной из критериальных функций.
Например, блок В1 решает задачу обеспечения классической устойчивости и адаптируемости, блок В2 -- задачу обеспечения структурной устойчивости и надежности. Целевая функция всегда выносится в отдельный блок. Часто это -- экономические требования. При этом все блоки задачи S1, имеют одно и то же пространство варьируемых параметров Rx. Здесь нет вложенности процедур проектирования, так как последовательность решения задач в блоках не является существенной. Информационный обмен типа "связь по варьируемым параметрам" для блоков ВР порождает дополнительные обратные связи по управлению, что приводит к необходимости многократного синтеза блоков.
Далее над каждым блоком BS1P возможно провести декомпозицию на блоки ВS1Pq, q =1,..., mq, локальные по множеству варьируемых параметров. При этом возникает задача координации полученных блоков. Таким образом, синтез каждого блока является многошаговым процессом (рис. 3.7).
Рассмотрим задачу выбора оптимальных параметров АСУ -- задачу S2. Особенность данной задачи заключается в том, что ее решение находится на двух уровнях. Это представляет дальнейшую декомпозицию задачи S2 на две вложенные подзадачи S21 и S22, решаемые на различных уровнях описания АСУ. Подзадача S21 является задачей проектирования АСУ по средним характеристикам, а подзадача S22 является задачей проектирования АСУ с учетом динамики выходных информационных потоков и внутренних параметров.
Многозначность решений определяет использование метода, заключающегося в поиске решений при различных начальных условиях. Задача проектирования АСУ с учетом динамических характеристик системы в свою очередь также декомпозируется на задачи. Решение указанного множества задач в соответствии с их вложенностью и с обязательным учетом внешних обратных связей позволяет на макроуровне получить рациональный вариант проектируемой системы. Необходимость координации решений частных задач и организации итерационных процедур диктует необходимость рассмотрения вопросов организации управления системным анализом. Объектами управления при системном проектировании являются процедуры первого и второго уровней декомпозиции задач 5, и 5"2.
Таким образом, более детальная разработка изложенных направлений исследования методов автоматизированного проектирования АСУ позволит вплотную подойти к решению общей задачи синтеза АСУ. Обобщая результаты настоящего раздела, можно представить состав задач системного уровня проектирования АСУ и их взаимосвязь (рис. 3.8). Все задачи S1, S2, S3 охвачены обратными
Связями, обеспечивающими координацию результатов их решений и итерационность процесса проектирования.
Необходимость создания средств автоматизации проектирования таких больших систем, как АСУ, обусловливает интерес проектировщиков к созданию достаточно универсальных и высокопроизводительных методов решения подзадач, указанных на рис. 3.8.
Похожие статьи
-
Значительное влияние на процесс дифференциации и интеграции управленческого труда оказывает возрастание сложности и масштабов решаемых управленческих...
-
Методы и средства проектирования - Автоматизированные системы обработки экономической информации
Проектирование - процесс создания проекта-прототипа, прообраза предполагаемого или возможного объекта, его состояния. Современная технология создания АИС...
-
В составе большинства АСУ (а для АСУП это обязательно) принято выделять функциональную и обеспечивающую части (рис. 2.3). Функциональная часть...
-
ОСНОВНЫЕ ПОЛОЖЕНИЯ, ОПРЕДЕЛЕНИЯ И ПОНЯТИЯ Совокупность управляющих воздействий, направленных на то, чтобы действительный ход процесса соответствовал...
-
Нет необходимости для детального рассмотрения предлагающихся разнообразных направлений классификации информации. Выделим только те признаки информации,...
-
Структура программно-математического обеспечения АСУ, его функции и принципы разработки Программные средства обеспечивают обработку данных и состоят из...
-
Если множество элементов объединено в систему по определенному признаку, то всегда можно ввести некоторые дополнительные признаки для разделения этого...
-
При принятии стратегического решения относительно используемых в корпоративной сети сетевых ОС необходимо учитывать, что они делятся по своим...
-
ВВЕДЕНИЕ - Автоматизированные системы обработки информации и управления на автомобильном транспорте
Автоматизированные системы управления нашли широкое применение во всех отраслях экономики. Создано и функционирует несколько тысяч АСУ различного класса...
-
Известно, что создание систем "с нуля" приводит к глобальным затратам компании на фонд оплаты труда, на поддержание созданного решения. К тому же, чем...
-
Для того, чтобы разработать оптимальный метод интеграции сторонних систем в существующую ИТ-инфраструктуру систем компании, требуется точно поставить...
-
Актуальность проблемы хранения и оперативного поиска данных привела к появлению такого понятия, как хранилище данных. Следует упомянуть о необходимости...
-
СТРУКТУРА И СОДЕРЖАНИЕ ИНФОРМАЦИОННОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ Своевременно получать информацию о ходе перевозочного процесса, расходе горючесмазочных...
-
ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ База данных как основа информационного обеспечения В состав информационного, программного и математического обеспечения...
-
Назначение и структура комплекса технических средств АСУ АТП Для информатизации бизнеса необходим широкий спектр программно-аппаратных средств, в том...
-
Информационное обеспечение, информационный фонд, информационная база, автоматический банк данных, система информации -- далеко не полный перечень...
-
"Автоматизированные системы обработки информации и управления (по отраслям)" -- специальность, по которой готовят специалистов, занимающихся созданием...
-
Основные принципы построения САПР - Состав систем автоматизированного проектирования
Разработка САПР представляет собой крупную научно-техническую проблему, а ее внедрение требует значительных капиталовложений. Накопленный опыт позволяет...
-
При создании или при классификации информационных систем неизбежно возникают проблемы, связанные с формальным - математическим и алгоритмическим...
-
АРМ - это рабочее место, которое оснащено вычислительной техникой и другими инструментальными средствами, обеспечивающими автоматизацию большей части...
-
Способы обработки данных - Автоматизированные системы обработки экономической информации
Различаются следующие способы обработки данных: централизованная, децентрализованная, распределенная и интегрированная. Централизованная предполагает...
-
ПО развивается исходя из требований других подсистем. ПО при обработке данных является связующим звеном между комплексом технических средств и другими...
-
Корпоративная интеграционная подсистема на базе IBM WebSphere Business Integration Message Broker [28] отвечает за выстраивание корпоративной...
-
Общая характеристика предприятия Здание администрации муниципального поселения Новый Сарбай, которое расположено на территории села Новый Сарбай, ул....
-
Параметры и особенности АСУ весьма индивидуальны для каждого предприятия. На них накладываются достаточно жесткие ограничения, диктуемые характером...
-
Математические методы в управлении - Офисные автоматизированные технологии
Один из мощных инструментов анализа, которым располагают люди, ответственные за управление сложными системами, - моделирование. Модель является...
-
Программный алгоритм визуальный гаусс В программу включены следующие процедуры: "gauss1", "gaussj", "New1Click", "Button1Click", "Button2Click",...
-
Вариант №1 1. Выбрать и обосновать наиболее эффективный метод решения задачи. 2. Разработать алгоритм и программу для решения задачи в общем виде. 3....
-
Построение модели предметной области с помощью описания структур данных и программного кода является классическим подходом в разработке ИС. Зачастую...
-
1. по функциональному назначению: информационные сети, вычислительные (по обработке), смешанные. Информационная сеть выполняет функции обработки,...
-
Наиболее распространенная форма - ЭВМ. Раньше чаще использовались вычислительные центры (ВЦ). Вычислительный центр - организуется и специализируется на...
-
Обеспечение высокопомехоустойчивого обмена информацией в автоматизированных системах управлениях
При передаче цифровых данных в комплексах средств автоматизации управления войсками и оружием существует вероятность того, что принятые данные могут...
-
Безопасность информации предполагает отсутствие недопустимого риска, связанного с утечкой информации по техническим каналам, несанкционированными и...
-
Технология управленческого процесса в банке состоит по крайней мере из 2 частей: информационного процесса и связанного с принятием управленческих...
-
Техническое обеспечение (ТО) - совокупность технических средств, предназначенных для работы информационной системы, а также соответствующая документация...
-
В данной главе представлено описание возможных вариантов совершенствования архитектуры предприятия в части гибкого подключения сторонних систем и их...
-
Всю документацию на программный продукт можно разделить на следующие категории: Документация управления проектом -- организационные документы, которыми...
-
Охрана труда на предприятии - Автоматизированные системы управления и обработки информации
1. Общие требования безопасности Настоящая инструкция разработана для административно-управленческого персонала, специалистов, инженерно-технического...
-
Состояние ОТ и ТБ - Автоматизированные системы управления и обработки информации
Инструктаж по технике безопасности проводит главный инженер по технике безопасности. Особое значение имеет инструктаж на рабочем месте с показом...
-
Развитие новых технологий постоянно ужесточает требования, предъявляемые к инженеру-конструктору. На первое место в современном конструировании выходят...
Методы решения задач оптимизации в АСУ - Автоматизированные системы обработки информации и управления на автомобильном транспорте