Цифро-аналоговый преобразователь - Системы цифрового управления
Цифро-аналоговый преобразователь (ЦАП) - устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток, напряжение или заряд). Цифро-аналоговые преобразователи являются интерфейсом между дискретным цифровым миром и аналоговыми сигналами.
Аналого-цифровой преобразователь (АЦП) производит обратную операцию.
Звуковой ЦАП обычно получает на вход цифровой сигнал в импульсно-кодовой модуляции (англ. PCM, pulse-code modulation). Задача преобразования различных сжатых форматов в PCM выполняется соответствующими кодеками.
ЦАП применяется всегда, когда надо преобразовать сигнал из цифрового представления в аналоговое, например, в проигрывателях компакт-дисков.
Типы ЦАП
Наиболее общие типы электронных ЦАП:
- - Широтно-импульсный модулятор - простейший тип ЦАП. Стабильный источник тока или напряжения периодически включается на время, пропорциональное преобразуемому цифровому коду, далее полученная импульсная последовательность фильтруется аналоговым фильтром нижних частот. Такой способ часто используется для управления скоростью электромоторов, а также становится популярным в Hi-Fi-аудиотехнике; - ЦАП передискретизации, такие, как дельта-сигма-ЦАП, основаны на изменяемой плотности импульсов. Передискретизация позволяет использовать ЦАП с меньшей разрядностью для достижения большей разрядности итогового преобразования; часто дельта-сигма ЦАП строится на основе простейшего однобитного ЦАП, который является практически линейным. На ЦАП малой разрядности поступает импульсный сигнал с Модулированной плотностью импульсов (c постоянной длительностью импульса, но с изменяемой скважностью), создаваемый с использованием отрицательной обратной связи. Отрицательная обратная связь выступает в роли фильтра верхних частот для шума квантования.
Большинство ЦАП большой разрядности (более 16 бит) построены на этом принципе вследствие его высокой линейности и низкой стоимости. Быстродействие дельта-сигма ЦАП достигает сотни тысяч отсчетов в секунду, разрядность - до 24 бит. Для генерации сигнала с модулированной плотностью импульсов может быть использован простой дельта-сигма модулятор первого порядка или более высокого порядка как MASH (англ. Multi stage noise SHaping). С увеличением частоты передискретизации смягчаются требования, предъявляемые к выходному фильтру низких частот, и улучшается подавление шума квантования;
- - ЦАП взвешивающего типа, в котором каждому биту преобразуемого двоичного кода соответствует резистор или источник тока, подключенный на общую точку суммирования. Сила тока источника (проводимость резистора) пропорциональна весу бита, которому он соответствует. Таким образом, все ненулевые биты кода суммируются с весом. Взвешивающий метод один из самых быстрых, но ему свойственна низкая точность из-за необходимости наличия набора множества различных прецизионных источников или резисторов и непостоянного импеданса. По этой причине взвешивающие ЦАП имеют разрядность не более восьми бит; - ЦАП лестничного типа (цепная R-2R-схема). В R-2R-ЦАП значения создаются в специальной схеме, состоящей из резисторов с сопротивлениями R и 2R, называемой матрицей постоянного импеданса, которая имеет два вида включения: прямое - матрица токов и инверсное - матрица напряжений. Применение одинаковых резисторов позволяет существенно улучшить точность по сравнению с обычным взвешивающим ЦАП, так как сравнительно просто изготовить набор прецизионных элементов с одинаковыми параметрами. ЦАП типа R-2R позволяют отодвинуть ограничения по разрядности. С лазерной подгонкой пленочных резисторов, расположенных на одной подложке гибридной микросхемы, достигается точность 20-22 бита. Основное время на преобразование тратится в операционном усилителе, поэтому он должен иметь максимальное быстродействие. Быстродействие ЦАП единицы микросекунд и ниже. В троичных ЦАП матрица постоянного импеданса состоит из резисторов 3R-4R с терминатором 2R.
На рис. 5.1 представлены наиболее распространенные структурные схемы систем прямого цифрового управления.
Состояние объекта управления в данный момент времени оценивается на основе информации, получаемой с помощью датчиков.
На рис. 5.1, А представлена система, в которой ЭВМ выполняет функцию сравнения (определение отклонения) и управляющего устройства (регулятор) и включена в основной контур управления.
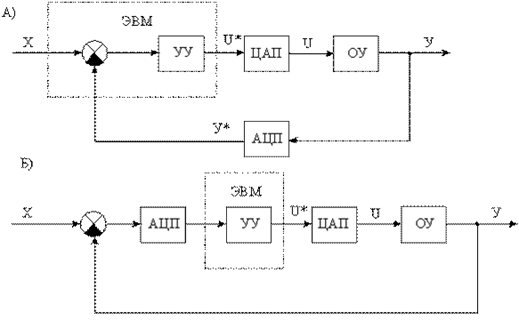
Рис. 5.1. Структурные схемы систем цифрового управления: А - функция сравнения; Б - функция управляющего устройства
Такой подход стал возможен благодаря повышению надежности работы ЭВМ. В данной структуре наиболее полно используются возможности ЭВМ, особенно при оптимизации работы объекта управления. Если ЭВМ выполняет только функции управляющего устройства, то структура системы имеет вид, представленный на рис. 5.1, Б. Кроме того, возможно использование ЭВМ для формирования задающих воздействий.
При этом реализуются достаточно сложные алгоритмы выработки заданий, связанные с учетом состояний внешней среды, желаемого поведения объекта как цели управления. Возможно использование ЭВМ в качестве последовательного или параллельного корректирующего устройства. Во всех случаях необходимо применение дополнительных устройств ЦАП и АЦП.
Если система управления является многомерной, то необходимо дополнительно установить аналоговый коммутатор и распределитель. Аналоговый коммутатор устанавливается перед АЦП, а распределитель - перед объектом управления. Во всех случаях ЭВМ предоставляет человеку дополнительное информационное обеспечение, необходимое для эффективного управления технологическими и транспортными процессами.
Наибольший эффект прямого цифрового управления достигается за счет того, что часть функций по обработке и анализу информации об управляемом процессе осуществляется не на предварительной стадии синтеза, а самой системой в процессе эксплуатации. Рассмотрим в качестве примера адаптивную самонастраивающуюся систему, построенную по принципу эталонной модели. Наиболее эффективным способом поддержания экстремального режима самонастраивающихся систем является введение в контур самонастройки модели-эталона. Процессы, протекающие в модели-эталоне, соответствуют задаваемым экстремальным условиям. В результате сравнения динамических процессов, происходящих в реальном объекте, с процессами модели можно подстроить характеристики регулятора таким образом, чтобы эти процессы достаточно близко совпадали. Тем самым обеспечивается действие реальной системы в экстремальном режиме. На рис. 5.2 представлена структура самонастраивающейся системы с моделью-эталоном (М-Э).
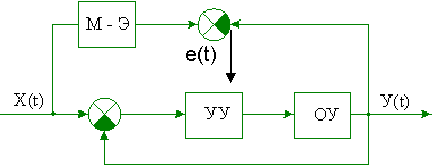
Рис. 5.2. Самонастраивающаяся система с моделью-эталоном
Задающее воздействие X(t) поступает одновременно на вход основного замкнутого контура управления и на вход модели-эталона. В результате сравнения получим сигнал E(t), т. е. отклонение параметра объекта управления Y(t) от сигнала модели YМ(t). В зависимости от величины и знака сигнала E(t) происходит изменение параметров УУ основного контура. Эти изменения происходят в соответствии с законами самонастройки, которые позволяют свести к нулю за конечный промежуток времени величину E(t), т. е. привести объект управления в экстремальную точку.
Похожие статьи
-
В системах цифрового управления средства вычислительной техники в основном выполняют роль регулятора или регулятора и устройства сравнения. Если объект...
-
В настоящее время стала очень актуальна проблема разработки, проектирования и создания "умных" зданий. Умные здания помогают более эффективнее и...
-
Интерфейсы систем управления. Классификация, основные характеристики интерфейсов. Системные (внутримашинные) интерфейсы. Интерфейсы персональных...
-
Назначение и технологические функции автоматизированной системы оперативного управления перевозками Автоматизированная система оперативного управления...
-
Основная цель системы ДИСКОР - совершенствование оперативного управления работой железных дорог на основе более эффективного использования пропускной...
-
Сформулируем задачу поиска оптимального регулятора в общих понятиях: дан многомерный реальный объект управления с квадратной матричной передаточной...
-
Для ускорения процесса конструирования регулятора в пространстве состояний в Matlab была разработана функция, которая, при должной настройке, позволяет...
-
CASE-технологии - Банки и базы данных. Системы управления базами данных
В последнее время широкое распространение получила технология автоматизированного проектирования информационных систем (ИС) и программных продуктов,...
-
Последовательность действий при принятии решения о внедрении корпоративной информационной системы С чего начать разработку решения? Любая промышленная...
-
Структура и процесс функционирования системы управления базами данных - Разработка базы данных
СУБД является прикладным программным обеспечением, предназначенным для решения конкретных прикладных задач и выполнения системных функций, расширяющих...
-
Solidworcks Enterprise PDM (SWE-PDM) управляет данными и процессами на различных этапах жизненного цикла изделия, обеспечивая коллективную (параллельную)...
-
Структура программно-аппаратного комплекса СКУД Полное наименование системы: автоматизированная система контроля и управления доступом (СКУД)....
-
Технология управленческого процесса в банке состоит по крайней мере из 2 частей: информационного процесса и связанного с принятием управленческих...
-
В работе использовались следующее программное обеспечение для решения поставленных задач: AutoCAD, ANSYS Workbench, ANSYS Icepak. Система AutoCAD...
-
Представляет собой двухтактный импульсный преобразователь, силовыми ключами которого являются Q1 и Q2. При поочередном переключении этих транзисторов...
-
В настоящее время систем видеонаблюдения на рынке продается очень много, и обычно бывает очень сложно принять правильное решение, выбрать нужное решение....
-
Числовой массив блок используется для чтения или записи массив до 64 целых или отдельных значений с плавающей точкой точности. Входы / Выходы Блоки...
-
Введение - Система управления базами данных
Развитие средств вычислительной техники обеспечило для создания и широкого использования систем обработки данных разнообразного назначения....
-
Распределенная обработка данных - Банки и базы данных. Системы управления базами данных
В современных условиях работа пользователя с небольшой по объему БД, расположенной на одном компьютере, в монопольном режиме является нехарактерной....
-
После того, как был реализован процесс карьерного планирования в информационной системе, можно сделать выводы о том, что внедрение информационной системы...
-
Уровни и типы моделей БД - Банки и базы данных. Системы управления базами данных
Любая БД отражает информацию об определенной предметной области. В зависимости от уровня абстракции, на котором представляется предметная область,...
-
Обзор классического подхода Приведем теорему для формирования линейного закона управления с обратной связью в пространстве состояний [3]: Дан объект,...
-
Введение - Проблемы конструирования устойчивой системы автоматического управления
Теория автоматического управления - молодая наука, оформившаяся в самостоятельную общенаучную дисциплину в начале XX века. Истоки ее инженерных методов...
-
Приведем некоторые оценки, линейные комбинации которых используются в качестве обобщенного интегрального критерия при решении задач в пространстве...
-
Информационная система Lumesse ETWeb является системой, которая автоматизирует весь комплекс процессов управления персоналом. Важно отметить, что данная...
-
Известно, что схемы процессов являются основой для настройки процесса в информационных системах. Схемы процессов легли в основу настройки процесса...
-
Строгое определение протокола выглядит как формализованный набор правил, используемый ПК для коммуникаций. Из-за сложности коммуникаций между системами и...
-
Сетевыми протоколами называют протоколы первого и второго уровней, определяющих архитектуру локальной сети, в том числе ее топологию, передающую среду,...
-
Микропроцессорная система управления лифтом - Технологический комплекс управления лифтом
Системы управления лифтами выполняются с применением релейноконтактной аппаратуры, бесконтактной логики и микропроцессорной техники. Первые два решения в...
-
Инфологическое моделирование - Банки и базы данных. Системы управления базами данных
Инфологическое проектирование является вторым этапом проектирования БД, который следует непосредственно после анализа предметной области. Эта стадия...
-
Блок модуля последовательного управления SCM (Sequential Control Module) представляет собой модуль-контейнер для последовательности блоков шагов STEP и...
-
Блок накопителя импульсного входа (Pulse Input Totalizer Block) предоставляет функция накопления расхода, дополняющую блок канала импульсного входа...
-
Управляющим компонентом многих СУБД является ядро, выполняющее следующие функции: Хоменко А. Д. Основы современных компьютерных технологий /А. Д....
-
Физические модели БД - Банки и базы данных. Системы управления базами данных
Под физической моделью БД понимается способ размещения данных на устройствах внешней памяти и способ доступа к этим данным. Каждая СУБД по-разному...
-
В современной технологии баз данных предполагается, что создание базы данных, ее поддержка и обеспечение доступа пользователей к ней осуществляются...
-
Транспортная стратегия России до 2025 г. определила основные направления развития железнодорожного транспорта. Предусмотрено создание таких условий, при...
-
АСУ СС взаимодействует с дорожной АСОУП. В условиях АСУ СС используют информацию двух типов: постоянную (нормативно-справочную информацию) и оперативную...
-
Представляет собой набор из более чем 35 интегрированных приложений, в которые входят: - приложения для управления финансами - приложения для управления...
-
Описание проекта, который является объектом исследования Проект - представляет собой внедрение информационно - аналитической системы управления карьерой...
-
Для лучшего понимания сути концепции необходимо знать следующие понятия и определения. Концепция информатизации железнодорожного транспорта - это система...
Цифро-аналоговый преобразователь - Системы цифрового управления