Алгоритм для исследования местности на основе многоагентных и нейронечетких систем
Введение
Лесные пожары, радиационные, различные биологические и химические заражения происходят ежегодно. Точно спрогнозировать распространение "облаков" загрязнения обычно довольно трудно, если вообще возможно. Поэтому для наблюдения за местностью используют людей, которые на транспорте перемещаются и вручную с помощью датчиков и зрительного наблюдения определяют ситуацию, на данный момент технический прогресс позволяет заменить их автоматизированными роботами (дронами).
Цели и задачи:
Цель работы - создание алгоритма управления дронами для разведывания обстановки загрязнения местности. Для достижения данной цели нам необходимо выполнить поставленные задачи:
- - Провести анализ проблем системы управления программой полетов. - Сравнить возможные архитектуры систем входящие в разрабатываемый алгоритм. - Провести исследование работоспособности системы и выбранного алгоритма.
Система управления полетов должна обеспечить возможность в любой момент максимально быстро исследовать определенный выбранный участок из всей подконтрольной ей территории, постоянную разведку всей территории и невредимость дронов и окружающих их объектов.
Исходя из требований к данной системе можно выделить ее задачи:
- 1) Максимально равномерно рассредоточить дроны по контролируемой ей территории 2) Следить за тем чтобы они находились на безлопастном расстоянии друг от друга 3) Определять, наблюдать и избегать инородные опасные объекты, такие как другие воздушные средства, плохие погодные условия и др.
Возможные архитектуры систем входящих в разрабатываемый алгоритм
Централизованная система - данный тип систем имеет единый центр из которого управляются все дроны.
Плюсы данной системы:
- 1) Возможен полный контроль за действиями дронов. 2) Информация попадает в центр обработки информации сразу после получения ее дроном.
Минусы:
- 1) Большие трудности при масштабировании данной системы. 2) Необходим большой комплекс для управления всем в случае выхода из строя или недоступности которого вся система становится неработоспособной. 3) Технически труднореализуем из-за необходимости поддержания постоянной связи между всеми дронами и центром управления
Последний недостаток данной архитектуры системы является причиной отказа от нее.
Многоагентная система - система управления при которой нет единого центра.
Плюсы данной системы:
- 1) Легко масштабируемая 2) Кроме самих дронов и систем обеспечения их работоспособности для работы ничего не нужно. 3) Не требует внесения никаких специальных требований в технические характеристики дронов 4) При выходе из строя одного или нескольких агентов система остается работоспособной
Минусы:
- 1) Управление данной системы очень "инертно". 2) В общем случае информация полученная дроном будет получена человеком которому она требуется через какой-то промежуток времени.
Так как для решения глобальной задачи по исследованию территории необходимо решить две больших подзадачи: управление полетами дронов и собственно исследование территории, то имеет смыл разнести эти задачи так чтобы подсистемы решающие их не зависели друг от друга, а именно на разные уровни многоагентных системы.
Построение и исследование системы
Мониторинг зараженный местность дрон
Для моделирования процесса поиска зараженной местности нам нужны двухуровневая многоагаентная система, первый уровень которой будет отвечать за управление полетами, это накладывает на него множество обязанностей, не вдаваясь в детальную имитацию этих процессов воспроизведем основные из них:
- 1) Группировка дронов, (экземпляров агента класса дрон), предназначенная для декомпозиции множества дронов на группы, которые потенциально могут конфликтовать. Это делается с целью снижения нагрузки на вычислительные мощности дронов. Информационный обмен выполняется только "внутри" каждой группы дронов. (U3) 2) Автономное планирование собственного движения дрона в зоне прибытия, выполняемое экземплярами агента класса дрон. (U4) 3) Перепланирование собственного движения в зоне прибытия, выполняемое экземплярами агента класса дрон для избегания конфликта как с другими дронами, так и с НЛО. (U5) 4) Управление выполнением взлета. (U6) 5) Управление выполнением маневра по обследованию зараженного участка. (U8) 6) Получение полетного плана от сторонних систем (Требование спасателей или указание от верхнего уровня системы исследовать определенный участок). (U7)
Сам первый уровень многоагентой системы должен состоять из нескольких типов агентов:
- 1) Агента класса дрон - агент этого типа управляет движением дрона. 2) Агента класса диспетчер дронов - агент который отвечает за запуск, возвращение и под заправку дронов. 3) Агент класс НЛО - агент моделирующий поведение неопознанного летающего объекта, (дроны не принадлежащие системе, летательные средства, инородный мусор и т. д.) 4) Сервер симуляции. Эта компонента не является агентом системы. Она предназначена для симуляции и отображения воздушной обстановки. Кроме того, она ответственна за генерацию событий типа появление нового дрона в воздушном пространстве и уход дрона из него. Эта компонента обеспечивает также пользовательский интерфейс, который необходим для задания различных ситуаций.
На рисунке 1 показана схема устройства первого уровня многоагентой системы.
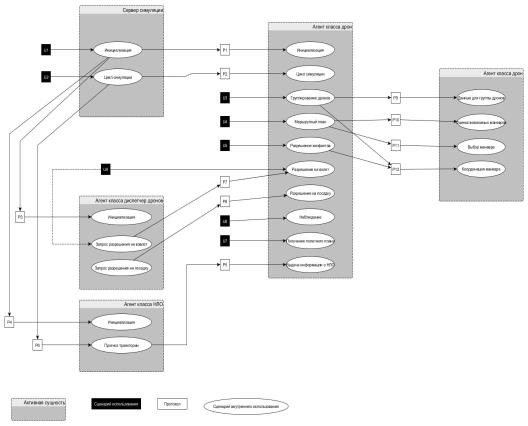
Рис1. Устройство первого уровня многоагентной системы.
Второй уровень многоагентой системы должен отвечать за собственно исследование территории.
Для этого в систему должны входить агенты:
- 1) Агента класса дрон-поисковик - агент этого типа управляет действиями дронов. 2) Агента класса человек - агент который отвечает выдачу запросов на исследование территории. 3) Сервер симуляции. Эта компонента не является агентом системы. Она предназначена для симуляции и отображения воздушной обстановки. Кроме того, она ответственна за генерацию событий типа появление нового дрона в воздушном пространстве и уход дрона из него. Эта компонента обеспечивает также пользовательский интерфейс, который необходим для задания различных ситуаций.
Данный уровень системы должен уметь:
- 1) Создавать распределенную базу знаний 2) Распределить дроны по заданиям. 3) Обеспечить людей находящихся на потенциально зараженной территории необходимой информацией о ситуации.
На рисунке 2 показана схема второго уровня многоуровневой многоагентой системы.
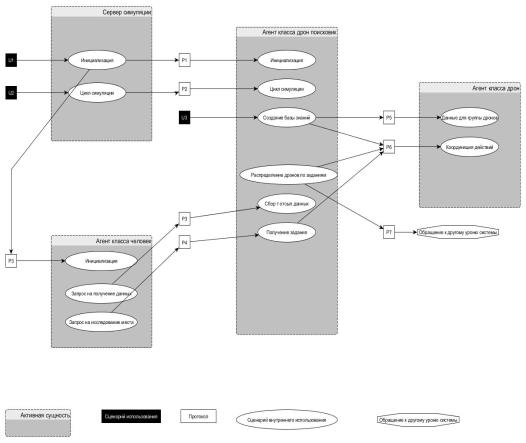
Рис2 Второй уровень многоагентной системы.
Результаты моделирования
Для проведения исследования были использованы карты реально существующих мест.
Карты предоставлены на Рисунке 3, Рисунке 4 и Рисунке 5.
Так как система может работать по разному при одинаковых параметрах запуска из-за неоднозначности группировки агентов. Для каждой карты было проведено по десять испытаний и в результаты были занесены средние значения.
Зараженная область считалась обнаруженной если дрон пролетел мимо нее на расстоянии менее 15 метров, здания считались абсолютно высокими и перелететь через них нельзя, только облететь сбоку, области где расположены деревья считались недоступными для полетов на высотах ниже 10 метров. Красными кругами на картах обозначены зараженные области, зелеными точки запуска дронов.
Результаты:
|
Номер карты для исследования |
Количество найденных мест заражения |
Время поиска |
Процент исследованной территории |
|
1 |
Все |
15.37 |
72 |
|
2 |
Все |
37.46 |
98 |
|
3 |
Все |
48.03 |
86 |
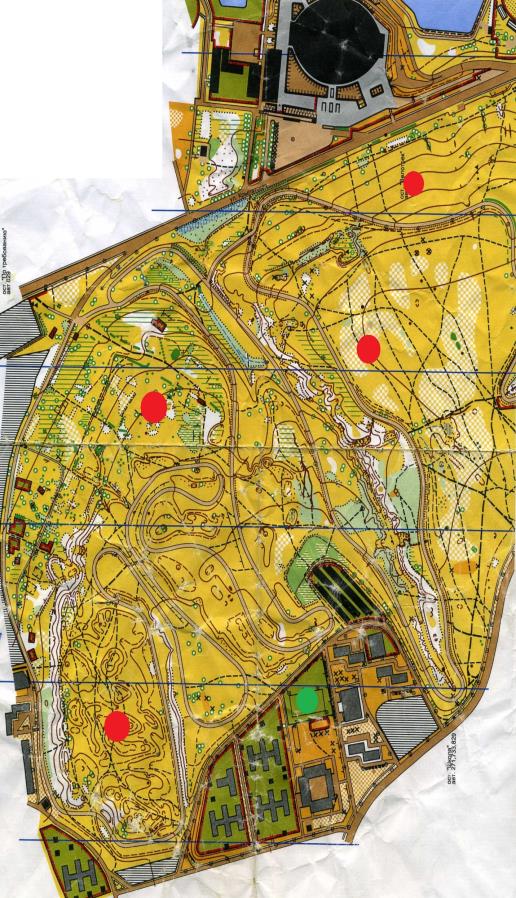
Рисунок 3 Карта для первого испытания
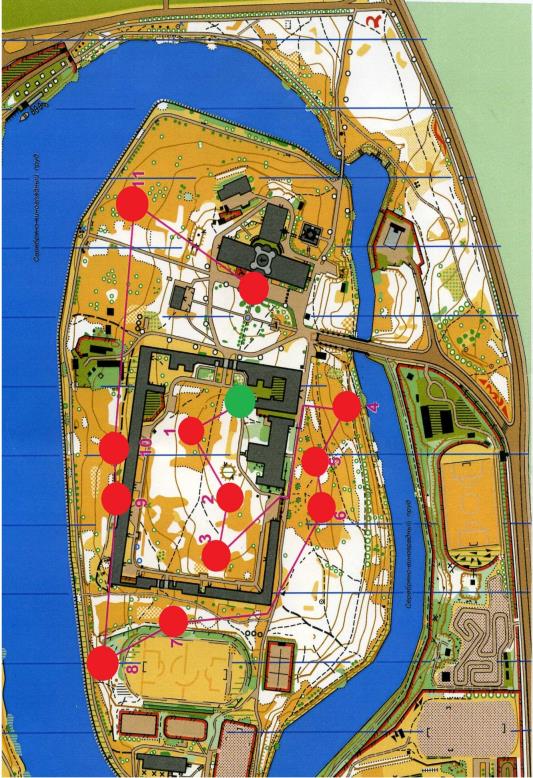
Рисунок 4 Карта для второго испытания
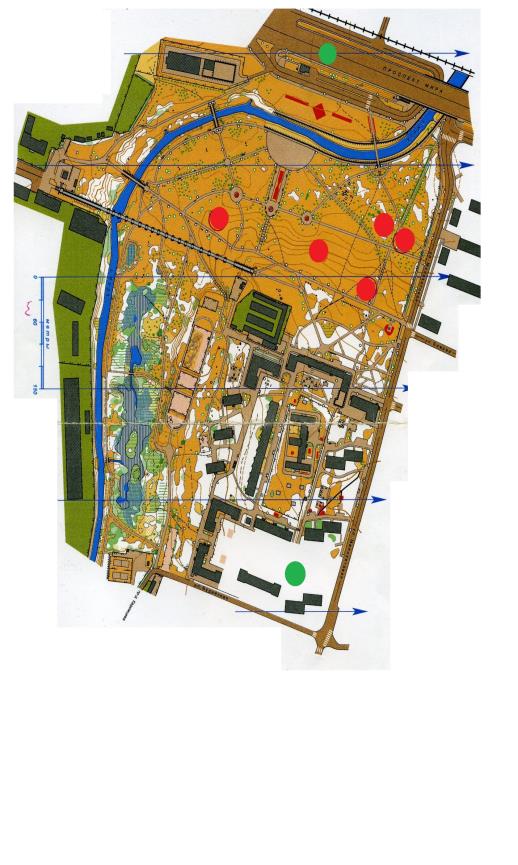
Рисунок 5 Карта для третьего испытания.
Заключение
Были проанализированы возможные варианты архитектуры системы поиска зараженных областей и выбранная многоуровневая многоагентная система. Разработана архитектура и при помощи имитационных моделей про исследована. В результате исследования данная архитектура показала свою работоспособность и возможные варианты ее улучшения.
Список литературы
- 1) В. И. Городецкий, О. В. Карсаев, В. В. Самойлов, С. В. Серебряков "Прикладные многоагентные системы группового управления" 2004г 2) В. Б. Тарасов "Основы теории агентов и многоагентых систем" 3) Френц Щебек. Вариации на тему одной планеты. 1972 год.
Похожие статьи
-
Методологические подходы Под эколого-экономической системой (ЭЭС) в настоящее время понимается сложная система взаимосвязанных и взаимообусловленных...
-
Согласно ст. 14 Федерального закона "Об отходах производства и потребления", индивидуальные предприниматели и юридические лица, в процессе деятельности...
-
Для понимания сущности управления эколого-экономическими процессами, в том числе и процессами в эколого-экономических системах, необходимо...
-
Территориально общественное самоуправление может служить своего рода платформой для внедрения системы раздельного сбора мусора. Я провела интервью с...
-
В условиях устойчивого экономического развития важное значение имеет не только получение прибыли любой ценой, но и управление современным экологически...
-
Уровни организации живых систем - Основы экологии
Экология изучает живые системы различных уровней организации в их взаимодействии со средой обитания. А что представляют собой живые системы? Что такое...
-
Повышение уровня жизни, особенно в европейских странах, привело к изменению отношения потребителя к пищевой продукции. Потребитель становится все более...
-
ИССЛЕДОВАНИЕ БУДУЩЕГО. МОДЕЛИ МИРА - Экология, современность и будущее
Научное прогнозирование (в отличие от разнообразных форм ненаучного предвидения) - это соответственно непрерывное, специальное, имеющее свою методологию...
-
В настоящее время наиболее полная схема концептуальной базы данных для научных исследований на особо охраняемых природных территориях разработана Н. А....
-
При проведении оценки жизненного цикла приходится иметь дело с большими объемами данных, учитывать сложные взаимосвязи между характеризуемыми...
-
Находясь в постоянном взаимодействии с природой, человек все острее ощущает необходимость налаживания таких взаимосвязей с окружающей средой, при которых...
-
Источники и виды загрязнения водных систем - Основы экологии
Мировой водохозяйственный баланс показал, что на все виды водопользования тратится 2200 км воды в год. На разбавление стоков уходит почти 20% ресурсов...
-
Первым этапом при организации обращения с отходами на предприятии является установление классов их опасности для окружающей среды. В соответствии со ст....
-
Природные системы атмосферы - Основы экологии
Типы воздушных масс формируются в зависимости от принадлежности к основным климатическим поясам и от характера увлажнения. В соответствии с этим...
-
Роль и значение российского государства в охране природы Государственное управление - это целенаправленная деятельность российского государства по...
-
Экология (от греч. жилище, местопребывание и понятие, учение) -- наука, изучающая взаимоотношения организмов друг с другом и со средой их обитания....
-
Среди мероприятий по стабилизации и дальнейшему улучшению экологической обстановки в Казахстане особое место отводится формированию системы...
-
Виды систем и виды связей в системах - Основы экологии
Предметом изучения экологии являются живые системы, следовательно, важно познакомиться с общими положениями теории систем. Различают три вида систем: 1....
-
Допустимые уровни шума для населения - Автотранспорт и его влияние на экологию
Для защиты людей от вредного влияния городского шума необходима регламентация его интенсивности, спектрального состава, времени действия и других...
-
Что такое организм и как в нем происходят метаболические процессы - Основы экологии
Организм -- любое живое существо. Он отличается от неживой природы определенной совокупностью свойств, присущих только живой материи: клеточная...
-
Материалы исследования Информационной базой стали ресурсы библиотек города, документы государственного законодательства, а так же материалы и методики...
-
Кадмий и человек - Свинец и кадмий в системе "почва - растения - удобрения
Основным источником отравлений Cd является работа в промышленности. Виды деятельности, при которых повышается риск отравления кадмием, таковы: *...
-
Солнечная энергия - Исследование экономических особенностей использования природных ресурсов
Один из источников энергии - Солнце. По классификации астрономов, Солнце - желтый карлик очень "средняя" для Галактики звезда по своим параметрам: массе,...
-
Допустимые уровни шума для населения - Транспортный шум и методы его снижения
В современных условиях нормирование уровня шума с целью устранения его негативного воздействия на здоровье населения диктуется многообразием факторов...
-
Системы автоматического мониторинга - Мониторинг окружающей среды
Как известно, первые автоматические системы слежения за параметрами внешней среды были созданы в военных и космических программах. В 50-е гг. в системе...
-
Экологическая система как объект математического моделирования - Математические методы в экологии
Любая единица (биосистема), включающая все совместно функционирующие организмы (биотическое сообщество) на данном участке и взаимодействующая с...
-
Анализ опытной эксплуатации существующей системы мониторинга г. Таганрога показал: - недостаточное количество стационарных постов наблюдений за уровнем...
-
Развитие экосистемных исследований - Экология как наука: история становления
Термин "экосистема" был предложен в 1935 году видным английским экологом-ботаником Артуром Тенсли (1871-1955) для обозначения естественного комплекса...
-
Невід'ємною частиною бакалаврської роботи на сам перед являється демонстрація умінь студента, які він отримав за 4 роки навчання в університеті. А саме...
-
Введение - Система государственного управления охраной окружающей среды
Актуальность предмета курсового проекта заключается так же в том, что нужды человека в соприкосновении с окружающим миром растут, а природные ресурсы,...
-
Региональные и локальные системы природопользования
Согласно Реймерсу, природопользование представляет собой совокупность всех форм эксплуатации природно-ресурсного потенциала и мер по его сохранению....
-
Целью дипломной работы является анализ ситуации по проблемам образования диоксинов в городе Костанай, в результате накопления бытового и промышленного...
-
Методические основы изучения экологической обстановки территории Зонирование - районирование, способ оптимизации условий существования человека путем...
-
Материалом исследований являлся лугово-степной компонент лесостепных ландшафтов Северного Казахстана и Среднерусской возвышенностей, его флора и...
-
Классификация устройств для очистки воздуха от пыли Пылеулавливающее оборудование при всем его многообразии может быть классифицировано по ряду...
-
Функционирование экосистем - Основы общей экологии
Энергия В Экосистемах. Напомним, что экосистема - это совокупность живых организмов, обменивающихся непрерывно энергией, веществом и информацией друг с...
-
Управление природопользованием - Особенности системы управления природопользованием
Управление природопользованием предполагает рациональное расходование природных ресурсов и основано на планировании природопользования, включающем...
-
В числе важнейших проблем, которые приходится решать каждому промышленному предприятию, -- организация системы экологически безопасного обращения с...
-
РАЦИОНАЛЬНОЕ ИСПОЛЬЗОВАНИЕ И ПОНЯТИЕ ОБ ЭКОЛОГИЧНСКОМ НОРМИРОВАНИИ. КАДАСТРЫ - Основы экологии
Экологическое нормирование - это деятельность по установлению качества окружающей природной среды, объема использования природных ресурсов и других...
-
Национальная система экологической сертификации - будущее России
В ходе длительного исследования проблем глобального потепления выяснилось, что современные города, а точнее здания -- один из главных источников...
Алгоритм для исследования местности на основе многоагентных и нейронечетких систем