Электрические элементарные преобразователи - Типы преобразователей
Наиболее распространенные электрические элементарные преобразователи рассмотрены в данном разделе. Ими являются: реостат, неуравновешенный мост, магнитоэлектрический преобразователь, трансформаторный преобразователь, усилитель, реверсивный электродвигатель
Реостат. Представляет собой намотанную на каркас проволочную спираль, по которой перемещается передвижной контакт (рис. 4). Реостат предназначен для преобразования перемещения l в изменение электрического сопротивления R
.
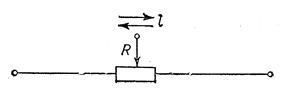
Рис.4 Реостат.
Существуют реостаты с линейной и нелинейной характеристиками. Зависимость выходного сигнала от входного для реостатов с линейной характеристикой имеет вид:

Достоинство реостата как преобразователя -- возможность получения любой заданной зависимости выходного сигнала от входного, например линейной или квадратичной. Следует иметь в виду, что для работы реостата как преобразователя его необходимо включить в электрическую цепь. При этом в зависимости от способа включения выходным сигналом реостата может быть напряжение на нем, ток или сопротивление. В последнем случае его включают в специальную схему, называемую уравновешенным мостом.
Неуравновешенный мост. Некоторые технологические параметры, например температура, первичным преобразователем преобразуются в изменение электрического сопротивления. Такие преобразователи можно рассматривать как резисторы с переменным сопротивлением. Для работы переменного резистора его так же, как и реостат, необходимо включить в электрическую цепь, В качестве такой цепи часто используют неуравновешенный мост, который преобразует переменное сопротивление в напряжение.
Чтобы понять принцип действия неуравновешенного моста, рассмотрим сначала более простой преобразователь сопротивления в напряжение, называемый делителем. Делитель представляет собой последовательное соединение переменного резистора R1 и постоянного резистора R2, включенных по схеме, показанной на рис. 4, а. Входным сигналом делителя является сопротивление резистора R1, а выходным -- напряжение на нем U1(рис.4,6).
Для работы делителя на него необходимо подать напряжение питания U пит. При изменении входного сигнала -- сопротивления R1 -- изменяется и общее сопротивление делителя равное R1+ R2.При этом изменяется ток через делитель i в напряжение на переменном резисторе U1, т. е. выходной сигнал. В соответствии с законом Ома для участка цепи ток i через делитель
Равен:
А напряжение на резисторе R1 по формуле:
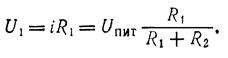
Изменение сопротивления R1 приводит к изменению и числителя и знаменателя дроби в формуле. Однако, в отличие от числителя, знаменатель при этом изменяется слабее, так как здесь R1 является лишь одним из слагаемых. Это приводит к нелинейности статической характеристики делителя Д, которая приведена на рис.5, в
Рис.5 Делитель:
А - схема; б - структурная схема; в - статическая характеристика;
Д - делитель.
Кроме нелинейности характеристики делитель обладает еще одним недостатком: его выходное напряжение равно нулю лишь при нулевом сопротивлении переменного резистора R1. Диапазон же изменения сопротивления переменных резисторов, применяемых в качестве датчиков, как правило, начинается не от нуля, а от некоторого начального сопротивления R1н. Поэтому выходное напряжение Делителя начинается с величины U1н и часть диапазона выходного сигнала от О до U1н оказывается неиспользованной.
Этого недостатка лишен неуравновешенный мост (рис. 6, а) благодаря применению в нем двух делителей: рассмотренного выше делителя Д1 с переменным резистором R1 и делителя Д2 с постоянными резисторами R3 и R4. Резисторы составляющие мост, называются его плечами.
Входным сигналом моста является сопротивление переменного резистора R1 а выходным -- напряжение? U, равное разности выходных сигналов делителей U1и U2 Выходной сигнал постоянного делителя связан с сопротивлениями его резисторов, так же как и в переменном делителе, по формуле:
Поэтому для уравновешенного моста зависимость выходного сигнала от входного имеет вид:
Эта зависимость приведена на рис.6, в.
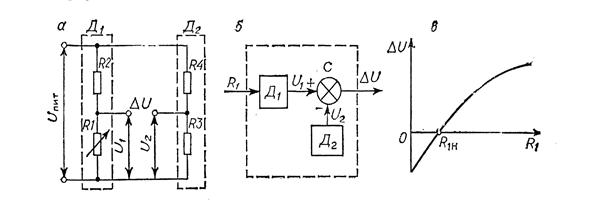
Рис.6 Неуравновешенный мост.
А - схема, б - структурная схема; в - статическая характеристика; Д1,Д2 - делитель С - сумматор.
Как видно из графика, зависимость выходного сигнала неуравновешенного моста от входного нелинейна. Из графика также видно, что выходное напряжение неуравновешенного моста? U равно нулю при начальном сопротивлении переменного резистора R1н. Как следует из формулы, подбором сопротивлений постоянных плеч моста всегда можно добиться того, чтобы нулевой выходной сигнал соответствовал началу диапазона изменения сопротивления переменного резистора (чтобы начало диапазона было т точке R1).
Состояние моста, при котором его выходной сигнал равен нулю, называется состоянием равновесия, а мост в этом состоянии -- уравновешенным.
Из формулы видно, что условие равновесия моста выполняется при равенстве произведений противоположных плеч моста, т. е. когда
Неуравновешенный мост как преобразователь сопротивления в напряжение? U можно представить как алгебраический сумматор двух напряжений U1и U2 (рис. , 6). Напряжение U1 является выходным сигналом делителя Д1 и изменяется при изменении его входного сигнала -- сопротивления R1. Напряжение U2 является выходным сигналом делителя Д2, образованного постоянными резисторами R3.и R4 Следовательно, величина напряжения U2 постоянна. Из анализа рис. 6,б можно заключить, что неуравновешенный мост реализует дифференциальный метод измерения, а делитель Д2 представляет собой постоянную меру. Особенность неуравновешенного моста заключается в том, что мера конструктивно является частью моста и образована резисторами его постоянных плеч.
Магнитоэлектрический преобразователь. Предназначен для преобразования тока в силу (рис.7).
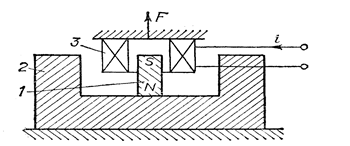
Рис.7.Магнитоэлектрический преобразователь.
1 - постоянный магнит; 2 - магнитопрвод; 3 - катушка.
Он состоит из постоянного магнита 1 и магнитопровода 2, образующих магнитную цепь, в разрыве которой помещена катушка 3. При взаимодействии электрического тока i, протекающего по катушке, с полем постоянного магнита возникает сила F, действующая на катушку. Зависимость этой силы от тока по закону силового действия тока выражается формулой:

Достоинством магнитоэлектрического преобразователя является линейность его характеристики.
Трансформаторный преобразователь. Трансформаторный преобразователь служит для преобразования перемещения в напряжение переменного тока. Для преобразования линейных перемещений наибольшее применение получили дифференциально-трансформаторные преобразователи, а для угловых перемещений -- ферродинамические
Чтобы понять принцип действия дифференциально-трансформаторного преобразователя, рассмотрим сначала более простой преобразователь линейного перемещения (рис.8). Он представляет собой трансформатор, состоящий из двух обмоток: первичной 1 и вторичной 2, расположенных на каркасе З. Внутри каркаса может перемещаться железный плунжер 4, который изменяет магнитную проницаемость среды. Поэтому выходной сигнал трансформатора -- напряжение переменного тока U -- зависит от входного сигнала -- положения плунжера l. Напряжение максимально, когда плунжер находится в середине каркаса, и уменьшается при его выдвижении из каркаса. Зависимость выходного сигнала трансформатора U от входного l приведена на рис. 8,в.
Дифференциально-трансформаторный преобразователь (рис. 9) состоит из двух одинаковых трансформаторов с общим каркасом и плунжером. Обе обмотки каждого трансформатора расположены на одной из половин каркаса
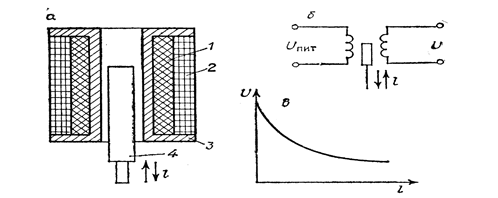
Рис.8 Трансформаторный преобразователь
А - устроиство;б - электрическая схема; в - статическая характеристика;1 - первичная обмотка;2 - вторичная обмотка;3 - каркас;4 - плунжер.
Электрическая схема дифференциально-трансформаторного преобразователя показана на рис. 9, 6. Как видно из схемы, первичные обмотки обоих трансформаторов соединены так, что одна является продолжением другой (согласное включение об моток). Вторичные же обмотки трансформаторов соединены таким образом, что их напряжения вычитаются друг из друга (встречное включение). Поэтому и результирующее напряжение U дифференциально-трансформаторного преобразователя равно разности напряжений вторичных обмоток составляющих его трансформаторов.
Зависимость напряжения дифференциально-трансформаторного преобразователя U (выходной сигнал) от перемещения плунжера l (входной сигнал) приведена на рис. 9, в. Из рисунка видно, что при среднем положении плунжера (l = О) выходной сигнал равен нулю.
В промышленных дифференциально-трансформаторных преобразователях ход плунжера выбирается малым по сравнению с длиной катушек трансформатора (обычно не более 5 мм). При этом, как видно из рис. 9, в, зависимость напряжения U от перемещения плунжера l можно считать линейной:

Где коэффициент пропорциональности k является коэффициентом передачи дифференциально-трансформаторного преобразователя. Линейность статической характеристики выгодно отличает
Дифференциально-трансформаторный преобразователь от простого трансформаторного
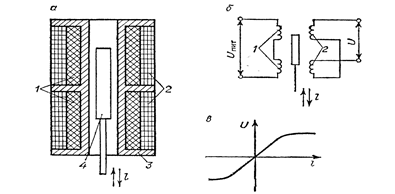
Рис.9 Дифференциально-трансформаторныи преобразователь
А - устроиство;б - электрическая схема; в - статическая характеристика;1 - первичная обмотка;2 - вторичная обмотка;3 - каркас;4 - плунжер.
Рассмотрим теперь ферродинамический преобразователь углового перемещения в напряжение переменного тока (рис.10). Он представляет собой трансформатор, первичная обмотка которого 1 намотана на железный сердечник 2, а вторичная обмотка З выполнена в виде поворотной рамки и находится в зазоре между концами сердечника. В соответствии с законом электромагнитной индукции напряжение U зависит от положения вторичной обмотки по отношению к силовым линиям магнитного поля между концами сердечника. Когда рамка со вторичной обмоткой расположена вдоль силовых линий, напряжение равно нулю. При повороте рамки в ту или иную сторону от этого положения напряжение увеличивается по абсолютной величине, а его фаза зависит от направления поворота рамки. Зависимость выходного сигнала ферродинамического преобразователя -- напряжения U -- от входного сигнала -- угла поворота рамки? -- приведена на рис. 10, б.
В промышленных ферродинамических преобразователях используется небольшой угол поворота рамки (обычно ±20оС), при котором зависимость напряжения U от угла поворота? остается линейной:
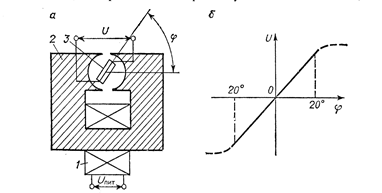
Рис.10 Дифференциально-трансформаторныи преобразователь
А - устроиство;б - статическая характеристика;1 - первичная обмотка;2 - сердечник;3 - вторичная обмотка (рамка).
Необходимо иметь в виду, что трансформаторный преобразователь следует включать в электрическую цепь переменного тока. При этом его выходной сигнал U будет зависеть от колебаний питающего напряжения, что является недостатком данной схемы. Для устранения этого недостатка приходится применять стабилизированные источники питания.
Трансформаторные преобразователи, так же, как и реостатные, преобразуют линейное перемещение в электрический сигнал. Казалось бы, для этой цели можно ограничиться реостатным преобразователем, как более простым. Однако трансформаторные преобразователи обладают существенным преимуществом перед реостатными: у них нет подвижных электрических контактов. Это преимущество является решающим при работе преобразователя в агрессивных средах, где подвижные электрические контакты ненадежны.
Усилитель. В измерительных цепях усилители предназначены для пропорционального усиления электрических сигналов. Различают усилители сигнала по величине -- усилители напряжения или тока -- и усилители сигнала по мощности -- усилители мощности, не изменяющие величины усиливаемого сигнала. Усиление сигналов по величине применяется в измерительных цепях, построенных по принципу следящей системы, для увеличения глубины обратной связи. Усилители мощности применяют обычно для устранения нагрузочного эффекта.
Реверсивный электродвигатель. Реверсивный электродвигатель может вращаться в разные стороны. По своим свойствам он, как преобразователь, является интегратором. действительно, пока к нему приложено напряжение, вал электродвигателя вращается. При снятии напряжения вал останавливается. Таким образом, при наличии входного сигнала выходной сигнал такого преобразователя непрерывно изменяется, а при отсутствии его может быть любым, но неизменным.
Таким образом, наличие реверсивного электродвигателя в элементах АСР, например в измерительных приборах, позволяет придать им астатизм без применения специального интегратора.
Похожие статьи
-
Преобразователь электрического сопротивления термометра в ток - Типы преобразователей
Наиболее распространенные электрические элементарные преобразователи рассмотрены в данном разделе. Ими являются: реостат, неуравновешенный мост,...
-
Определяем сопротивление резистора Rк. R3= Rк (0.2 0.3) RВых = 0.25*24662 (Ом),где RВых = RВх. ок. Определяем сопротивление резистора Rэ. Rэ =R4= 0.5*Rк=...
-
Преобразователь напряжения переменного тока в ток - Типы преобразователей
Этот преобразователь (рис.20, а) обычно применяют в качестве нормирующего для преобразования в унифицированный токовый сигнал выходного сигнала...
-
Большинство современного подвижного состава оборудовано системами регулирования с помощью реостатов. Во время разгона на каждый пуск расходуется энергия...
-
Выбор транзисторов, по допустимой мощности рассеяния на коллекторе, и максимальной амплитуде коллекторного тока: PMax(0.250.3)PВых РMax(0.2750.33) (Вт)...
-
Механические элементарные преобразователи - Типы преобразователей
Наиболее распространенные механические элементарные преобразователи: рычаг, шток, пружина. 1. Рычаг. Служит для преобразования вращающего момента М в...
-
Перемножители и делители функций - Цифро-аналоговый преобразователь с параллельным интерфейсом
Как уже указывалось выше, ЦА-преобразователи на МОП-ключах, допускают изменение опорного напряжения в широких пределах, в том числе и смену полярности....
-
Основные типы полупроводниковых преобразователей электрической энергии - Типы преобразователей
К основным типам полупроводниковых преобразователей относятся: - неуправляемые и управляемые выпрямители, ведомые сетью инверторы; - импульсные...
-
Структурная схема усилителя постоянного тока - Проектирование усилителей электрических сигналов
При проектировании усилителя постоянного тока следует учесть, что его структурная схема состоит из нескольких частей: КП 52.292028.201Э2 Изм. Лист №...
-
Обоснование схемы электрической принципиальной - Блок сопряжения телефонной связи
Усилительный каскад телефонного усилителя также как оконченный каскад ларингофонннго усилителя выполнены по двухтактной трансформаторной схеме с общим...
-
Цифро-аналоговые преобразователи - Типы преобразователей
Задача заключается в преобразовании величины, которая задана двоичным (или многозначным двоично-десятичным) числом в пропорциональный уровень напряжения...
-
Для реализации УНЧ выбираем микросхему КР538УН3 - одноканальный сверхмалошумящий усилитель низкой частоты. Ее параметры: UПит - 57.5(В) UM. вых. max. -...
-
Усилители звуковой частоты предназначены для усиления непрерывных периодических сигналов, частотный спектр которых лежит в пределах от десятков герц до...
-
Параллельные ЦАП - цифро-аналоговые преобразователи
ЦАП с cуммированием весовых токов Большинство схем параллельных ЦАП основано на суммировании токов, сила каждого из которых пропорциональна весу...
-
Схемы применения цифро-аналоговых преобразователей относятся не только к области преобразования код - аналог. Пользуясь их свойствами можно определять...
-
Рассмотрим пример 8-разрядного последовательно-параллельного АЦП, относящегося к типу многотактных (рис. 1). Здесь процесс преобразования разделен во...
-
Описание ПУ Преобразователь уровней (ПУ) - специальная схема, преобразующая выходные сигналы цифровой ИС (интегральная схема) одного типа во входные...
-
Аналого-цифровые преобразователи - Типы преобразователей
Предварительные замечания об АЦП Кроме чисто "цифрового" сопряжения (ключи, лампы в т. п.), которое обсуждалось в нескольких предыдущих разделах, часто...
-
Преобразователь Э. Д. С. термопары в ток - Типы преобразователей
Для преобразования э. д. с. термопары в унифицированный токовый сигнал применяют нормирующий преобразователь. Преобразователь (рис. 18, а) состоит из...
-
Вероятность безотказной работы: TСр - среднее время безотказной работы. S - интенсивность отказов. Если изделие содержит n-типов элементов, последний из...
-
Схема восьмиразрядного преобразователя с суммированием напряжений, изготавливаемого в виде ИМС, приведена на рис. 5. Основу преобразователя составляет...
-
Выбор и обоснование схемы электрической структурной - Блок сопряжения телефонной связи
В данном дипломном проекте рассматривается схема блока сопряжения. Блок представляет собой устройство с двумя усилителями и кнопкой вызова внешнего...
-
Преобразователь этого типа, называемый в литературе также АЦП с Поразрядным уравновешиванием , является наиболее распространенным вариантом...
-
Обзор методов построения аналогичных устройств - Проектирование усилителей электрических сигналов
Усилителями постоянного тока (УПТ) называются устройства, предназначенные для усиления медленно изменяющихся сигналов вплоть до нулевой частоты. На рис....
-
В терминах электроники измерительный преобразователь определяется обычно как прибор, преобразующий неэлектрическую физическую величину (называемую...
-
Аттенюаторы и интеграторы на ЦАП - Цифро-аналоговый преобразователь с параллельным интерфейсом
Аттенюаторы, т. е. регуляторы уровня сигнала, с цифровым управлением гораздо более надежны и долговечны, чем традиционные аттенюаторы на основе...
-
Преобразователь тока в давление сжатого воздуха - Типы преобразователей
Такой преобразователь (рис. 16, а) состоит из рычага 1, преобразователя сопло-заслонка 3--4, сильфона 6, магнитоэлектрического преобразователя 7, а также...
-
Расчет и выбор элементов задатчика интенсивности Предполагаемая принципиальная электрическая схема задатчика интенсивности изображена на рис.5.1. Рис....
-
Преобразователь силы в ток - Типы преобразователей
Преобразователь (рис. 17, а) состоит из рычага 1, дифференциально-трансформаторного преобразователя З, магнитоэлектрического преобразователя 5, а также...
-
Электрическая схема и работа генератора Г-250 - Назначение генератора переменного тока
Генератор Г250 является одним из самых распространенных генераторов и имеет наиболее простую электрическую схему. Электрическая схема этого генератора...
-
Преобразователь силы в давление сжатого воздуха - Типы преобразователей
Такой преобразователь состоит из рычага 1, сопла с заслонкой 4, сильфона 6, а также пневматического усилителя мощности 5. Входным сигналом...
-
Как известно, частота автоколебаний в таком генераторе определяется формулой (1), А затухание в частотно-зависимой ветви обратной связи на частоте 0 ....
-
Основой ЦАП этого типа является матрица конденсаторов, емкости которых соотносятся как целые степени двух. Схема простого варианта такого преобразователя...
-
АЦП последовательного счета Этот преобразователь является типичным примером последовательных АЦП с единичными приближениями и состоит из компаратора,...
-
Регулировочная характеристика СИФУ при косинусоидальном опорном напряжении определяется выражением . (7.1) При линейной пилообразной форме опорного...
-
Введение - Реверсивный тиристорный преобразователь для электроприводов постоянного тока
Электропривод на основе двигателей постоянного тока используется в различных отраслях промышленности - металлургии, машиностроении, химической, угольной,...
-
Электрический расчет К выходным, межкаскадным и выходным цепям согласования ЦС, установленным в ГВВ, предъявляется ряд требований: 1. ) Трансформация...
-
Электростатистический преобразователь - Системы телекоммуникации
Электростатистический преобразователь (рисунок 3) или конденсаторный преобразователь содержит конденсатор, состоящий из тонкой легкой подвижной мембраны...
-
Программируемый контроллер прерываний КР580ВИ59 позволяет свести до минимума аппаратные затраты на реализацию системы прерываний и обеспечивает широкое...
-
ЦАП на источниках тока - цифро-аналоговые преобразователи
ЦАП на источниках тока обладают более высокой точностью. В отличие от предыдущего варианта, в котором весовые токи формируются резисторами сравнительно...
Электрические элементарные преобразователи - Типы преобразователей