Разработка принципиальной схемы - Разработка микропроцессорной системы управления робототехническим комплексом
Разработка устройств сопряжения
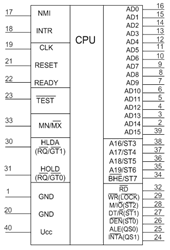
16-разрядный микропроцессор К1810ВМ86
AD15- AD0 - мультиплексная двунаправленная шина адреса/данных. - разрешение старшего байта.
ALE - строб адреса. - строб данных.
- - чтение. - запись. - является признаком обращения к ЗУ. - передача/прием данных. READY - готовность. CLK - тактовая синхронизация (тактирование). RESET - сброс. - минимальный/максимальный режим.
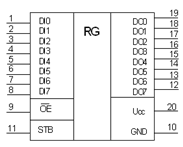
Буферный регистр К1810ИР82
Буферный регистр представляет собой 8 - разрядный параллельный регистр. Используется для организации адресных защелок и портов ввода - ввода.
DI7- DI0 - линии входных данных.
DO7- DO0 - линии выходных данных.
STB - вход стробирующего сигнала.
- разрешение выдачи данных.
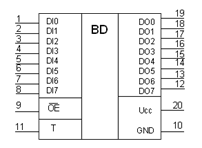
Шинный формирователь К1810ВА86
Шинный формирователь представляет 8 - разрядный параллельный приемопередатчик. Используется как буферное устройство шины данных в микропроцессорных системах.
DI7- DI0 - вход/выход линий данных.
DО7- DО0 - вход/выход линий данных.
Т - вход управления направлением передачи.
- вход разрешения передачи.
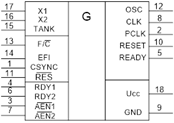
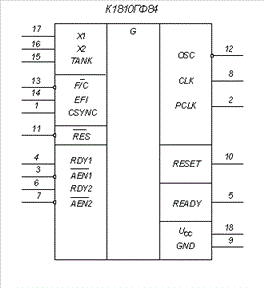
Системный генератор КР1810ГФ84
Генератор тактовых импульсов предназначен для управления ЦП К1810ВМ86 и периферийными устройствами.
Х1 и Х2 - выводы для подключения кварцевого резонатора. - вход для подключение RC - цепи.
- вход используется для выбора задающего генератора. RDY1 - вход сигнала готовности от устройств подключаемых к каналу системы. - вход разрешения адресации для сигнала готовности RDY1. С LK - выход тактовых импульсов. READY - выход сигнала готовности синхронизированный с задним фронтом сигнала CLK. RESET - выход сигнала сброса синхронизированного с задним фронтом сигнала СLK.
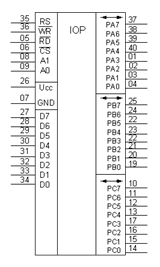
Программируемый параллельный адаптер КР580ВВ55
БИС параллельного интерфейса предназначена для организации ввода/вывода параллельной информации различного формата.
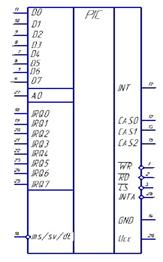
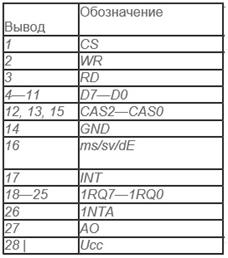
Программируемый контроллер прерываний КР1810ВН59А
Системный контроллер КР1810ВГ88
В зависимости от состояния МП контроллер управляет обменом данными между локальной шиной процессора и системной шиной при наличии доступа к управлению шинами МП, а также между локальной шиной и шиной ввода-вывода или резидентной шиной. Контроллер системной шины служит для формирования управляющих сигналов по сигналам состояния микропроцессора при обращении к памяти, при обращении к устройству ввода/вывода ().
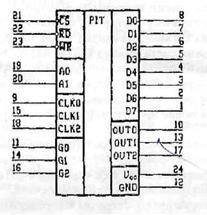
Программируемый таймер КР580ВИ54
CS - выборка кристалла. RD - чтение.
WR - запись.
АО, А1 - адресные входы, по которым осуществляется адресация к одному из каналов.
CLK2 - CLKO - входы тактовых сигналов для управления счетчиком/таймером.
GATA2 - GATAO - входы разрешения счета.
OUT2--OUTO -- выходы счетчика/таймера.
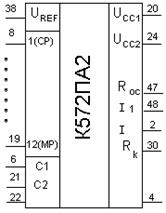
Цифро-аналоговый преобразователь К572ПА2
|
Тип микросхемы |
К572ПА2(КР572ПА2) | ||
|
А |
Б |
В | |
|
Число разрядов, |
12 | ||
|
Время установления по току, мкс |
15 | ||
|
Опорное напряжение, В |
15 | ||
|
Напряжение(ток) потр,(),В(мА) |
5(2) 15(2) | ||
|
Абсолютная погрешность преобразования, МР |
20 | ||
|
Выходной ток, мА |
0.82 | ||
|
Дифференциальная нелинейность, % |
0.025 |
0.05 |
0.1 |
|
Технология |
ТТЛ |
КМОП |
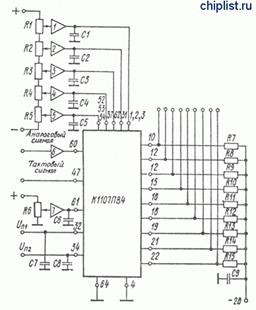
Аналого-цифровой преобразователь К1107ПВ4
|
Тип микросхемы |
К1107ПВ4 |
|
Число разрядов, |
8 |
|
Время преобразования, мкс |
0.3 |
|
Частота преобразования, МГц |
100 |
|
Опорное напряжение, В |
3 |
|
Напряжение(ток) потр,(), (мА) |
|
|
Нелинейность, МР |
1(МР) |
|
Входное напряжение,, (мА) |
2.5 |
|
Выходное напряжение (ток) низкого уровня, (), В (мА) |
2 |
|
Выходное напряжение высокого уровня (),В (мА) |
1 |
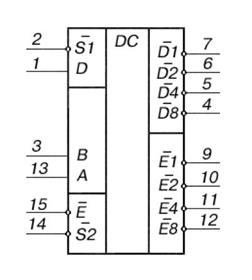
Дешифратор К155ИД4
- 1 - информационный вход D; 2 - стробирующий вход S1; 3 - адресный вход B; 4 - выход D8; 5 - выход D4; 6 - выход D2; 7 - выход D1; 8 - общий; 9 - выход E1; 10 - выход E2; 11 - выход E4; 12 - выход E8; 13 - адресный вход A; 14 - стробирующий вход S2; 15 - информационный вход E; 16 - напряжение питания;
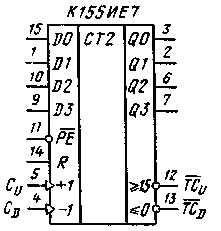
Счетчик К155ИЕ7
1 - вход информационный D2; 2 - выход второго разряда Q2; 3 - выход первого разряда Q1; 4 - вход "обратный счет"; 5 - вход "прямой счет"; 6 - выход третьего разряда Q3; 7 - выход четвертого разряда Q4; 8 - общий; 9 - вход информационный D8; 10 - вход информационный D4; 11 - вход предварительной записи; 12 - выход "прямой перенос"; 13 - выход "обратный перенос"; 14 - вход установки "0" R; 15 - вход информационный D1; 16 - напряжение питания
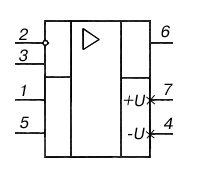
Операционный усилитель К140УД11
1,5,8 - коррекция; 2 - вход инвертирующий; 3 - вход неинвертирующий; 4 - напряжение питания - Uп; 6 - выход; 7 - напряжение питания +Uп;
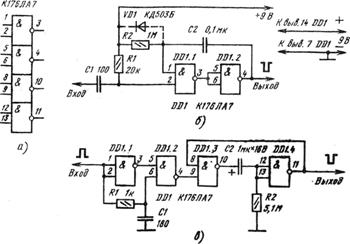
Микросхема К176ЛА7
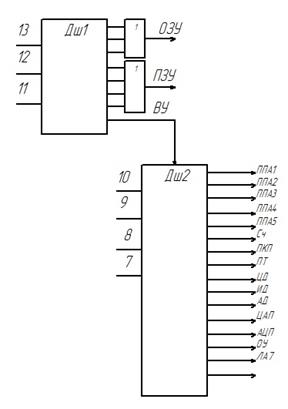
Распределение адресного пространства
V(ОЗУ)= 6Кб;
V(ПЗУ)=1,25* V(ОЗУ)=7,25Кб;
V(ВУ)=1Кб;
V(общ)= V(ОЗУ)+ V(ПЗУ)+ V(ВУ)=14Кб;
V(АП)=16Кб;
N(АП)=14.
Микропроцессорный робототехнический интерфейс
Разобьем адресное пространство на 8 равных частей (по 2Кб)
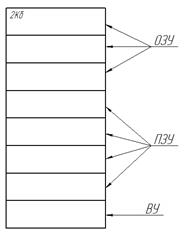
Составим схему дешифрации:
Похожие статьи
-
Для разработки принципиальной электрической схемы, исходя из задания и выбранной элементной базы, составим структурную схему стенда, которая будет иметь...
-
Информационно - измерительные системы: структура и состав Постоянное совершенствование и развитие средств измерений необходимо для промышленного...
-
Исходя из разработанной структурной схемы, можно выделить следующие части проектируемой схемы. Аналого-цифровой преобразователь должен преобразовывать...
-
Выбор модуля CPU будем производить исходя из технического задания и выбранных входных и выходных модулей, и, учитывая то, что конфигурирование...
-
Структура программно-аппаратного комплекса СКУД Полное наименование системы: автоматизированная система контроля и управления доступом (СКУД)....
-
В настоящее время разводка входных и выходных сигналов производится децентрализованно к устройствам, подключенным напрямую к промышленной шине и...
-
В процессе анализа элементной базы и существующих устройств был выбран алгоритм работы схемы, подобранна элементная база и разработаны соответствующие...
-
Для преобразования аналогового сигнала от датчика положения гантрии в цифровую форму, для дальнейшей обработки с помощью ЭВМ необходимо использование...
-
Если в результате поиска на схеме по данным из таблицы будет найдено несколько экземпляров оборудования (т. е. с одинаковой маркировкой или...
-
Принципиальная электрическая схема определяет полный состав элементов и связей между ними и дает детальное представление о принципах работы объекта...
-
Выбранные датчики, исполнительные механизмы и их месторасположение, а также структурная схема АСУ ТП производства сухого молока позволяют составить схему...
-
Управление процессом тесто приготовления может быть реализовано с помощью АСУТП (супервизорный режим) по модулю, который предусматривает два...
-
Последовательный регистр сдвига, с работой которого мы познакомились в предыдущем разделе, обладает двумя недостатками: он позволяет вводить только по...
-
DipTrace имеет интегрированные библиотеки, которые содержат графическую информацию о символах и типовых корпусах компонентов и текстовую упаковочную...
-
В настоящее время стала очень актуальна проблема разработки, проектирования и создания "умных" зданий. Умные здания помогают более эффективнее и...
-
Для участков контура, которые задаются линейной функцией, используем метод линейной интерполяции по ЦДА. А для участков, которые описываются функцией для...
-
Введение - Разработка микропроцессорной системы управления робототехническим комплексом
Робототехника -- наука о процессе разработки автоматизированных технических систем на базе электроники, механики и программирования. Роботостроение --...
-
Котроллеры на основе блока CPU BC9120, в принципе как и на основе любого другого блока CPU фирмы BECKHOFF, построены по модульному принципу. Что это...
-
Основным достоинством интерфейса Centronics является его стандартность - он есть на каждом компьютере и на всех компьютерах работает одинакового (правда...
-
В соответствии со структурной схемой разработаем принципиальную схему, выберем компоненты для каждого из введенного блока. В качестве устройства...
-
Наименование системы Программная система управления контентом портала с архивом конструкторской документации. Цели, назначение и область использования...
-
Панель набора программ содержит кнопки, а также индикаторы всех режимов работы СУ: АУ-ДУ, ПАУ-ШАГ, ЗИП, ЦИКЛ0-ЦИКЛ1. Воздействуя на кнопки, оператор...
-
Структура и процесс функционирования системы управления базами данных - Разработка базы данных
СУБД является прикладным программным обеспечением, предназначенным для решения конкретных прикладных задач и выполнения системных функций, расширяющих...
-
Существует несколько вариантов реализации требуемого устройства. Например можно задачу отслеживания положения гантрии возложить на аппаратное...
-
Выбор комплекса задач обеспечения информационной безопасности Современные системы контроля и управления доступом (СКУД, СКиУД) способны максимально...
-
Функциональная схема включения. - Микропроцессорная техника
Данная функциональная схема используется при работе микропрцессора в максимальном режиме при организациях многопроцессорных систем. При обращенях к...
-
Введение - Разработка системы управления базой данных "Судоходство"
Любому предприятию, фирме, организации в процессе экономической деятельности приходится постоянно сталкиваться с большими информационными потоками:...
-
Оценка стоимости разработки программного обеспечения, или, в частности информационной системы, - один из самых важных, сложных и в то же время неизбежных...
-
Структурная схема в максимальном режиме. - Микропроцессорная техника
Функциональные возможности комплекта К1810 позволяют организовать многопроцессорное вычисление системы. Задачу согласования многопроцессорной системы...
-
Выбор входных модулей На стенде будут находиться следующие органы управления: - трехпозиционный переключатель с фиксацией положения, предназначен для...
-
Итак, для того чтобы построить устройство, нам нужно определиться, что мы будем использовать в качестве источника информации и куда будем передавать...
-
Программирование подключенной к параллельному порту аппаратуры заключается в установке определенных битов в регистрах данных и управления и чтении...
-
Clc X0=0; Y0=100; X1=70; Y1=120; Xk=x1-x0; Переход в СК Y1O1X1 Yk=y1-y0; X=[x0,x1]; Y=[y0,y1]; D=0.05; [n, m]=Lin_CDA(xk, yk, d); A1=n+x0; B1=m+y0;...
-
Использование микросхемы АЦП имеет некоторые особенности. Так сигналы на ее входы рекомендуется подавать в следующей последовательности: напряжения...
-
Осуществить компоновку элементов схемы можно как вручную, так и автоматически. Для запуска автоматического позиционирования элементов необходимо...
-
Заключение - Разработка системы управления базой данных "Судоходство"
Информационные технологии прочно вошли в нашу жизнь. Применение ЭВМ стало обыденным делом, хотя совсем еще недавно рабочее место, оборудованное...
-
Создание запросов - Разработка системы управления базой данных "Судоходство"
Для дальнейшего формирования отчетов необходимо создать два запроса на выборку это "Кто и где находится" и "Страны где были корабли". Для создания...
-
Цель Работы - использовать принципы архитектуры "Документ-Представление" для выборки и сохранения данных в файлах, а также взаимодействия элементов меню,...
-
Цель Работы - изучить приемы создания и использования шаблонов классов. - Теоретические сведения Достаточно часто встречаются классы, объекты которых...
-
Объект ориентированный класс программирование Цель Работы - изучить методику создания одномерных динамических символьных массивов при помощи...
Разработка принципиальной схемы - Разработка микропроцессорной системы управления робототехническим комплексом