Программа реализации контура - Разработка микропроцессорной системы управления робототехническим комплексом
Clc
X0=0;
Y0=100;
X1=70;
Y1=120;
Xk=x1-x0; Переход в СК Y1O1X1
Yk=y1-y0;
X=[x0,x1];
Y=[y0,y1];
D=0.05;
[n, m]=Lin_CDA(xk, yk, d);
A1=n+x0;
B1=m+y0;
Plot(a1,b1,x, y)
Hold on;
X2=70;
Y2=160;
Xk=y2-y1; Переход в СК Y2O2X2
Yk=x2-x1;
X=[x1,x2];
Y=[y1,y2];
D=0.05;
[n, m]=Lin_CDA(xk, yk, d);
A2=-m+x2;
B2=n+y1;
Plot(a2,b2,x, y)
Hold on;
X3=100;
Y3=190;
R=x3-x2;
Xk=y3-y2; Переход в СК Y3O3X3
Yk=x3-x3;
[t, m] = Krug_Otsen(xk, yk, r);
A3=-m+x3;
B3=t+y2;
Xc3=0:0.01:r;
Yc3=sqrt(r.^2-xc3.^2);
Xc3=xc3+100;
Yc3=yc3+160;
Plot(a3,b3,xc3,yc3)
Hold on;
X4=130;
Y4=160;
R=x4-x3;
A4=b3-60; Построение участка засчет поворота СК
B4=-a3+260; Y3O3X3 на 90гр.
Xc4=-xc3+200;
Yc4=yc3;
Plot(a4,b4,xc4,yc4)
Hold on;
A5=130; Построение участка засчет поворота СК
B5=-b2+280; Y2O2X2 на 180гр.
X5=[x1+60,x2+60];
Y5=[y1+40,y2-40];
Plot(a5,b5,x5,y5)
Hold on;
X5=130;
Y5=120;
X6=200;
Y6=100;
Xk=y5-y6; Переход в СК Y6O6X6
Yk=x6-x5;
X=[x5,x6]
Y=[y5,y6]
D=0.05
[n, m]=Lin_CDA(xk, yk, d)
A6=m+x5
B6=-n+y5
Plot(a6,b6,x, y)
Hold on;
X7=100;
Y7=0;
R=x6-x7;
Xk=x6-x7; Переход в СК Y7O7X7
Yk=y6-y6;
[ t, m ] = Krug_Otsen(xk, yk, r)
A7=m+y6
B7=-t+x7
Xc7=0:0.01:r;
Yc7=sqrt(r.^2-xc7.^2);
Xc7=xc7+100;
Yc7=-yc7+100;
Plot(a7,b7,xc7,yc7)
Hold on;
X7=100;
Y7=0;
X8=x0;
Y8=y0;
R=x7-x8;
A8=b7; Построение участка засчет поворота СК
B8=-a7+200; Y7O7X7 на 90гр.
Xc8=-xc7+200;
Yc8=yc7;
Plot(a8,b8,xc8,yc8)
Grid on;
Похожие статьи
-
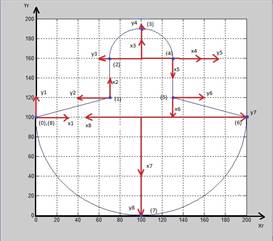
Для участков контура, которые задаются линейной функцией, используем метод линейной интерполяции по ЦДА. А для участков, которые описываются функцией для...
-
Введение - Разработка микропроцессорной системы управления робототехническим комплексом
Робототехника -- наука о процессе разработки автоматизированных технических систем на базе электроники, механики и программирования. Роботостроение --...
-
Файл-модуль unit1.pas Unit Unit1; Interface Uses Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms, Dialogs, Menus, XPMan,...
-
Программный алгоритм визуальный гаусс В программу включены следующие процедуры: "gauss1", "gaussj", "New1Click", "Button1Click", "Button2Click",...
-
В настоящее время разводка входных и выходных сигналов производится децентрализованно к устройствам, подключенным напрямую к промышленной шине и...
-
Информационно - измерительные системы: структура и состав Постоянное совершенствование и развитие средств измерений необходимо для промышленного...
-
Рис. 3 Результаты сохраненные в файле: 2 1 1 |2 3 2 3 |6 6 5 4 |5 Gauss X1=-7,4 X2=1,2 X3=2,2 J-Gauss X1=-7,4 X2=1,2 X3=2,2 Инструкция по работе с...
-
Метод Гаусса. Метод Гаусса решения систем линейных уравнений состоит в последовательном исключении неизвестных и описывается следующей процедурой. С...
-
В ходе разработки системы к прочим затратам можно отнести оплату интернет-трафика. Тариф Интернет-провайдера Мегалинк составляет 500 рублей в месяц....
-
Постановка задачи нечеткого управления Была рассмотрена задача по прогнозированию износа (в микрометрах) тормозных дисков автомобилей. Входные данные:...
-
Множество D с двумя заданными на нем операциями (плюс) и (умножение) называется диоидом, если выполнены следующие аксиомы: § Ассоциативность. §...
-
Поворот точки относительно центра на заданный угол: X = o. X + (p. X-o. X) * cos(angle) - (p. Y-o. Y) * sin(angle) Y = o. Y + (p. X-o. X) * sin(angle) +...
-
Программу обработки данных можно запускать как до, так и после включения устройства сопряжения. Перед первым использованием, а также после изменения...
-
Известно, что любые элементы имеют разброс параметров. Поэтому, использование динамического диапазона АЦП может быть неполным или наоборот, может...
-
Сравнение аналогов - Разработка программы для реализации редактора временных графов синхронизации
Поскольку конечной целью работы был редактор сетей Петри, интегрированный с внешней библиотекой алгебраических вычислений, было рациональным рассмотреть...
-
Сеть Петри это двудольный направленный граф с маркировкой, ребра которого задают причинно-следственные отношения "события-условия" и именуются дугами....
-
Сообщения системы, Системные требования, Элементы управления - Разработка визуального редактора
Главные сообщения пользователю представлены отдельными диалоговыми окнами, появляющимися на главном окне после определенных действий. Если пользователь...
-
Рассмотрим произвольное звено коррекции: (1.5) Соотношение между и обусловлено требованием строгой реализуемости проектируемого звена как необходимого...
-
Известно, что схемы процессов являются основой для настройки процесса в информационных системах. Схемы процессов легли в основу настройки процесса...
-
Воспользуемся теперь критерием (2.14). Пространство состояний Структурная схема системы с учетом введенного воздействия примет вид: Запишем...
-
Формирование области многокритериального выбора вариантов Стоит задача о выборе марки автомобиля с их известными особенностями и характеристиками....
-
F ( 0,"заключение : об1", [ 3, -1 ] ). "промежуточное заключение", ... "вопрос о свойствах", ... Список подкрепляющих фактов F ( 0, "об2", [ 1,2 ] ). F (...
-
Физическая модель базы данных определяет способ размещения данных в среде хранения и способ доступа к этим данным, которые поддерживаются на физическом...
-
Проектирование реализации операций бизнес-процесса "Продажа товара покупателям" Номер операции на диаграмме Операция Необходимые разработки Специфика...
-
Литература - Разработка программы для реализации редактора временных графов синхронизации
1. Авдошин С. М. Оптимизация гибких производственных систем // 1987. 2. Лескин А. А. Алгебраические модели гибких производственных систем // 1986. 3....
-
Заключение - Разработка программы для реализации редактора временных графов синхронизации
Результатом выполнения задания является реализованный редактор временных графов синхронизации (класс временных сетей Петри), соответствующий задачам,...
-
Пример с tegview ¦ L-- qml ¦ +-- tegrender. js ¦ L-- tegview. qml +-- tegview ¦ +--...
-
Постановка задачи, выбор предметной области Предметная область: "Автомобиль". Создание автомобиля будет состоять из трех этапов: выбор кузова, выбор...
-
Микропроцессорная система управления лифтом - Технологический комплекс управления лифтом
Системы управления лифтами выполняются с применением релейноконтактной аппаратуры, бесконтактной логики и микропроцессорной техники. Первые два решения в...
-
Выбор средств реализации информационной системы Названные в параграфе 1.4. настоящей работы задачи могут быть решены тремя типами средств автоматизации:...
-
Приложение разрабатывается в соответствии с паттерном проектирования Model-View-Presenter (MVP), который является производным от Model-View-Controller...
-
Стек технологий При выборе стека технологий основное внимание уделялось следующим факторам, в порядке убывания значимости: § Кроссплатформенность; §...
-
Воспользуемся теперь для поиска решения функционалом (2.13). Пространство операторов В рассматриваем примере добавка (2.12) может быть представлена:...
-
Пользовательский интерфейс должен позволять заводить в базе данных информацию о новых охранниках, обслуживаемых объектах, автоматизировать составление...
-
В современной технологии баз данных предполагается, что создание базы данных, ее поддержка и обеспечение доступа пользователей к ней осуществляются...
-
Структура программно-математического обеспечения АСУ, его функции и принципы разработки Программные средства обеспечивают обработку данных и состоят из...
-
Задачи ОМП автомобилей, других транспортных средств, ценных грузов крайне актуальны как для государственных правоохранительных органов, так и для частных...
-
Обработка путевой и перевозочной документации включает в себя расчет оплаты выполненной транспортной работы, а также расчеты следующих итоговых...
-
Последовательность действий при принятии решения о внедрении корпоративной информационной системы С чего начать разработку решения? Любая промышленная...
-
Программная документация Модуля включает: Руководство системного программиста; Руководство оператора. Программная документация должна быть оформлена...
Программа реализации контура - Разработка микропроцессорной системы управления робототехническим комплексом