Моделирование движения подводного аппарата для введения сорбента при ликвидации аварийных разливов нефти
Введение
Локализация и ликвидация аварийных разливов нефти и нефтепродуктов предусматривает выполнение многофункционального комплекса задач, реализацию различных методов и использование технических средств. Независимо от характера аварийного разлива нефти и нефтепродуктов (ННП) первые меры по его ликвидации должны быть направлены на локализацию пятен во избежание распространения дальнейшего загрязнения новых участков и уменьшения площади загрязнения [1].
Проектирования устройства для введения сорбента в толщу воды.
Для решения поставленной задачи разработан аппарат для нанесения сорбента в толще воды, которым можно управлять и регулировать подачу сорбента с борта судна (рис. 1).
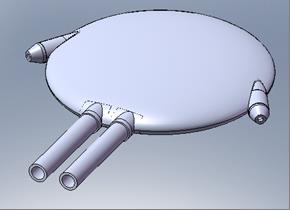
Рисунок 1 - Модель подводного аппараты для распыления сорбента
Аппарат сможет отдаляться от судна на расстояние 100 - 150 метров. При необходимости остановки аппарата или изменении траектории его движения подача воды прекращается или осуществляется через одно сопло.
Расчет траектории движения аппарата в толще воды, с учетом сопротивления соединительного шланга.
Для расчета сопротивлений создаваемых шлангом, возникающих при движении аппарата шланг принятой длиной 100 метров разбивается на 20 участков, на каждом из которых производиться расчет действующих на него сил. Количество участков выбрано по причине не равномерного распределений изгибающего момента по всей длине шланга.
Угловую скорость движения аппарата определяется по формуле:
(1)

Где V - скорость аппарата на каждом участке;
L - длина участка.
Отсюда зная угловую скорость можно определить скорость движения на каждом участке:
(2)

Где - угловая скорость;
L - длина участка.
Силу, действующую на участок трубопровода можно определить по формуле:
(3)

Где - коэффициент сопротивления трубопровода;
- плотность морской воды;
- скорость движения аппарата;
S - площадь поперечного сечения трубопровода.
Изгибающий момент этой силы равен произведению модуля силы на длину участка:
(4)
Для каждого из 20 участков рассчитаем среднюю скорость, силу и изгибающий момент по формулам:


Произведя расчет скорости, силы и изгибающего момента для каждого из 20 участков длиною 5 метров, можно определить суммарные значения сил и моментов для полной длины шланга.
Найдем суммарные значения сил и моментов:


Тогда полное эквивалентное сопротивление трубопровода:
Вычислим эквивалентное сопротивление аппарата при разных значениях скорости:
Отсюда суммарное буксировочное сопротивление:
При сравнении эквивалентных сопротивлений гибкого трубопровода и самого аппарата мы получаем значения позволяющие определить, что движение маятникового типа для данной системы возможно при расположении сопел под углом 900, а для обеспечения движения возвратно-поступательного типа угол расположения сопел вирируется в пределах от 150 до 450.
Отсюда делаем вывод, что в зависимости от поставленной задачи и условий применения аппарата, возможно, осуществлять его движение в толще воды как возвратно-поступательное движение вдоль оси трубопровода (рисунок 2 б), так и движение маятникового типа (рисунок 2 а).
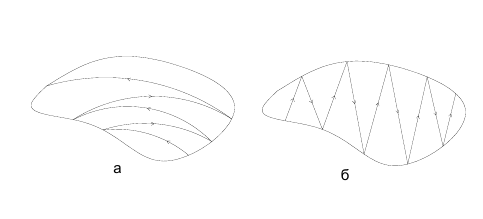
Рисунок 2 - Траектории движения подводного аппарата
Аппарат данного типа позволит ликвидировать нефтяные разливы в любых погодных условия, а так же обеспечить производство работ по ликвидации нефтяных пятен в ледовых условиях и битом льду, без применения дополнительного оборудования, что позволит уменьшить время и экономические затраты.
Библиографический список
- 1. Примеры расчетов по гидравлике [Текст]: учебное пособие / А. Д. Альтшуль и др. - М.: Стройиздат, 2014. - 256 с. 2. Андресон, Р. К. Биотехнологические методы ликвидации загрязнений нефтью и нефтепродуктами [Текст] / Р. К. Андресон.-М.: ВНИИОЭНГ, 2006. - 24 с. 3. Артемов, A. B. Современные технологии очистки нефтяных загрязнений [Текст] / A. B. Артемов // Нефть. Газ. Промышленность. - М.: Недра, 2008. - №2. - С. 340. 4. Владимиров, A. M. Охрана окружающей среды [Текст]: / A. M. Владимиров. - Л: Гидромстиоиздат, 2007.-224 с. 5. Современные методы и средства борьбы с разливами нефти [Текст] : научно-практическое пособие / А. И. Вылковап и др. - СПб.: Центр-Техинформ, 2012. -309 с.
Похожие статьи
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
В процессах нефти - и газопереработки для обеспечения необходимой температуры в аппаратах требуется подводить или отводить тепло. Для этого на...
-
Определение силы инерции - Тяговый расчет Урала 4320
Р И (разгон, торможение) для равномерного движения равна Р И = 0. Результаты расчета сил сопротивления движению отдельно для груженного и порожнего...
-
Определение силы сопротивления воздуха - Тяговый расчет Урала 4320
При движении автомобиль преодолевает сопротивление воздуха, которое складывается из нескольких сопротивлений. Передней частью автомобиля воздух сжимается...
-
По ходу плавки в электродуговую печь требуется подавать различное количество энергии. Менять подачу мощности можно изменением напряжения или силы тока...
-
Сварочный аппарат Малыш своими руками - Самодельные сварочные аппараты
Сварочный аппарат работает от сети 220 В и обладает высокими электротехническими характеристиками. Благодаря применению новой формы магнитопровода вес...
-
Составление расчетной схемы и исходного уравнения для расчета зажимного усилия Силовой расчет станочных приспособлений можно разбить на следующие этапы:...
-
Расчет вентиляции - Сварка вертикальных швов стенки резервуара для хранения нефтепродуктов
Зонты служат для улавливания вредных веществ с тепловыделениями, создающими устойчивый восходящий поток. Зонты делаются открытыми со всех сторон и...
-
Введение - Расчет валов редуктора
Валы предназначены для передачи крутящего момента, а также для поддержания вращающихся деталей машин: зубчатых, червячных колес, шкивов ременных передач,...
-
Обоснование выбора теплообменника В нефтеперерабатывающей, нефтехимической, химической, газовой и других отраслях промышленности наибольшее...
-
Шпонки призматичні з округленими торцями. Розміри перерізів шпонок і пазів і довжини шпонок - за ГОСТ 23360-78 (табл. 8.9). Матеріал шпонок - сталь 45...
-
Монтаж оборудования Транспортировка выпарного аппарата Выпарной аппарат транспортируют на железнодорожных платформах отдельными блоками. При перевозке...
-
Введение - Сварка вертикальных швов стенки резервуара для хранения нефтепродуктов
Ведущее место в машиностроении занимает сварочное производство. Многие узлы и детали, входящие в состав изготавливаемых изделий, машин и оборудования и...
-
Стальной аппарат с мешалкой. Он состоит из корпуса и перемешивающего устройства с приводом. Корпус! включает в себя: цилиндрическую обечайку с приварным...
-
Введение - Технология переработки нефти
Бурный научно-технический прогресс и высокие темпы развития различных отраслей науки и мирового хозяйства в XIX - XX вв. привели к резкому увеличению...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
-
- Первая промежуточная ступень: Rя. пр1=3,83 Ом; с; Н-м; МКон. фикт = МС1 = 68,93 Н-м. При расчете переходного процесса М=f(t) для первой промежуточной...
-
В курсовом проекте на тему посчитать и подобрать нормализованный теплообменник для охлаждения хлороформа. Выполнен технологический и утонченный расчет...
-
Расчетная плотность нефти при температуре Т=ТР определяется по формуле Где - температурная поправка, кг/(м3-К), =1,825 - 0,001315293 ; 293 - плотность...
-
ВВЕДЕНИЕ - Тормозная система с пневматическим приводом
Тормозная система служит для снижения скорости и быстрой остановки автомобиля, а также для удержания его на месте при стоянке. Наличие надежных тормозов...
-
Введение, Понятие о температуре и о температурных шкалах - Общие сведения об измерениях температуры
Температурой называют величину, характеризующую тепловое состояние тела. Согласно кинетической теории температуру определяют как меру кинетической...
-
Угловая скорость ходового колеса: ,(11). Определим требуемое передаточное число: ,(13) Принимаем редуктор Ц3вкф-125 с передаточным числом ; диаметр...
-
Делаем пересчет механических характеристик двигателя для полученных значений сопротивлений. Полученные значения заносим в таблицу 5. RД. ст1'=3,43 Ом,...
-
Выбор оборудования Выбираю вертикально сверлильный станок модели 2Н135. Станок предназначен для сверления, рассверливания, зенкерования, развертывания...
-
Конструкция и принцип работы - Спиральный теплообменный аппарат
Варианты конструкций спиральных теплообменников. Спиральные теплообменники с противотоком или параллельным движением сред. В общем случае этот тип...
-
Введение - Проектирование насадочного абсорбера
Области применения абсорбционных процессов в промышленности весьма обширны: получение готового продукта путем поглощения газа жидкостью; разделение...
-
Поправочный расчет - Кинематический расчет привода главного движения станка мод. ВМ127М
Геометрический и прочностной расчет зубчатых колес. Для дальнейших расчетов необходимо рассчитать крутящий моменты На входном валу: Н-м Где Р1 = Рдв = 3...
-
Опасность работ в водной среде - Аварийные выбросы в условии акватории
Как уже отмечалось ранее разработка морских месторождений приводит к глобальным экологическим последствия. Отличительными особенностями аварий на морских...
-
Одним из основных элементов манипулятора является привод. В условиях повышенных требований к вакуумной гигиене широкое применение в качестве приводов...
-
Физические свойства - Технология переработки нефти
Нефть - это Вязкая маслянистая жидкость, темно-коричневого или почти черного цвета с характерным запахом, обладающая слабой флюоресценцией, более легкая...
-
Особенность конструкции Сварочный аппарат работает от сети переменного тока напряжением 220 В. Особенностью конструкции аппарата является использование...
-
Все виды технического обслуживания должны выполняться в полном соответствии с требованиями по безопасности обслуживающего персонала и обеспечения...
-
Напор подача насос трубопровод Определение величины потребного напора для заданной подачи Для определения потребного напора запишем уравнения Бернулли...
-
Расчет гидравлического сопротивления колонны - Абсорбер для очистки газов от диоксида углерода
Гидравлическое сопротивление обуславливает энергетические затраты на транспортировку газового потока через абсорбер [6, с.201]. Для тарельчатых колонн...
-
Отверстие под вал; D/ =32 мм. Штуцер для наполнения; D// =120мм. Штуцер для манометра; D/// =50мм Рис. 8 Расчет укрепления отверстий. Определяем линейное...
-
В приспособлениях силы трения возникают на поверхностях контакта заготовки с опорными и зажимными элементами. Величина коэффициента трения (зависит от...
-
При проведении количественного анализа риска линейной части магистральных нефтепроводов, как проектируемых, так и действующих, является вычисление...
-
Выбор и эксплуатация рабочих жидкостей - Рабочие жидкости для гидросистем
Выбор рабочих жидкостей для гидросистемы машины определяется: - диапазоном рабочих температур; - давлением в гидросистеме; - скоростями движения...
-
Объем трубопровода на каждом участке определяется по формуле (7) м3 м3 м3 м3 м3 м3 м3 м3 м3 м3 м3 м3 м3 Найдем суммарный объем м3 Определим вес...
Моделирование движения подводного аппарата для введения сорбента при ликвидации аварийных разливов нефти