Общий принцип работы GPS - Использование принципов работы системы GPS и Wi-Fi микрочипов информационной системы WayNet в решении дорожных пробок
В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), равномерно "покрывающих" всю земную поверхность). Орбиты ИСЗ вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчики спутников непрерывно излучают сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, находящемся в некоторой точке земной поверхности, координаты которой нужно определить.

Рис. GPS спутник
В приемнике измеряется время распространения сигнала от ИСЗ и вычисляется дальность "спутник-приемник" (радиосигнал, как известно, распространяется со скоростью света). Поскольку для определения местоположения точки нужно знать три координаты (плоские координаты X, Y и высоту H), то в приемнике должны быть измерены расстояния до трех различных ИСЗ (Рис.2). Очевидно, при таком методе радионавигации (он называется беззапросным) точное определение времени распространения сигнала возможно лишь при наличии синхронизации временных шкал спутника и приемника.
Поэтому в состав аппаратуры ИСЗ и приемника входят эталонные часы (стандарты частоты), причем точность спутникового эталона времени исключительно высока (долговременная относительная стабильность частоты обеспечивается на уровне 10-13 - 10-15 за сутки). Бортовые часы всех ИСЗ синхронизированы и привязаны к так называемому "системному времени". Эталон времени GPS - приемника менее точен, чтобы чрезмерно не повышать его стоимость. Этот эталон должен обеспечивать только кратковременную стабильность частоты - в течение процедуры измерений.
На практике в измерениях времени всегда присутствует ошибка, обусловленная несовпадением шкал времени ИСЗ и приемника. По этой причине в приемнике вычисляется искаженное значение дальности до спутника или "псевдодальность". Измерения расстояний до всех ИСЗ, с которыми в данный момент работает приемник, происходит одновременно. Следовательно, для всех измерений величину временного несоответствия можно считать постоянной. С математической точки зрения это эквивалентно тому, что неизвестными являются не только координаты X, Y и H, но и поправка часов приемника D t. Для их определения необходимо выполнить измерения псевдодальностей не до трех, а до четырех спутников. В результате обработки этих измерений в приемнике вычисляются координаты (X, Y и H) и точное время. Если приемник установлен на движущемся объекте и наряду с псевдодальностями измеряет доплеровские сдвиги частот радиосигналов, то может быть вычислена и скорость объекта. Таким образом, для выполнения необходимых навигационных определений надо обеспечить постоянную видимость с нее, как минимум, четырех спутников. После полного развертывания созвездия ИСЗ в любой точке Земли могут быть видны от 5 до 12 спутников в произвольный момент времени. Современные GPS-приемники имеют от 5 до 12 каналов, т. е. могут одновременно принимать сигналы от такого количества ИСЗ. Избыточные измерения (сверх четырех) позволяют повысить точность определения координат и обеспечить непрерывность решения навигационной задачи.
В состав системы входят:
- - созвездие ИСЗ (космический сегмент); - сеть наземных станций слежения и управления (сегмент управления); - собственно GPS-приемники (аппаратура потребителей).
Космический сегмент
Состоит из 26 спутников (21 основной и 5 запасных), которые обращаются на 6 орбитах. Плоскости орбит наклонены на угол около 55° к плоскости экватора и сдвинуты между собой на 60° по долготе. Радиусы орбит - около 26 тыс. км, а период обращения - половина звездных суток (примерно 11 ч. 58 мин.). На борту каждого спутника имеется 4 стандарта частоты (два цезиевых и два рубидиевых - для целей резервирования), солнечные батареи, двигатели корректировки орбит, приемо-передающая аппаратура, компьютер.
Передающая аппаратура спутника излучает синусоидальные сигналы на двух несущих частотах: L1=1575,42 МГц и L2=1227,6 МГц. Перед этим сигналы модулируются так называемыми псевдослучайными цифровыми последовательностями (точнее, эта процедура называется фазовой манипуляцией). Причем частота L1 модулируется двумя видами кодов: C/A-кодом (код свободного доступа) и P-кодом (код санкционированного доступа), а частота L2- только P-кодом. Кроме того, обе несущие частоты дополнительно кодируются навигационным сообщением, в котором содержатся данные об орбитах ИСЗ, информация о параметрах атмосферы, поправки системного времени.
Кодирование излучаемого спутником радиосигнала преследует несколько целей:
- - обеспечение возможности синхронизации сигналов ИСЗ и приемника; - создание наилучших условий различения сигнала в аппаратуре приемника на фоне шумов (доказано, что псевдослучайные коды обладают такими свойствами); - реализация режима ограниченного доступа к GPS, когда высокоточные измерения возможны лишь при санкционированном использовании системы.
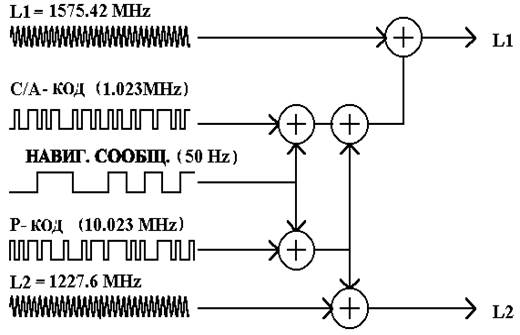
Рис. Кодирование радиосигнала
Код свободного доступа C/A (Coarse Acquisition) имеет частоту следования импульсов (иначе называемых "чипами") 1,023 МГц и период повторения 0,001 сек., поэтому его декодирование в приемнике осуществляется достаточно просто. Однако точность автономных измерений расстояний с его помощью невысока.
Защищенный код P (Protected) характеризуется частотой следования импульсов 10,23 МГц и периодом повторения 7 суток. Кроме того, раз в неделю происходит смена этого кода на всех спутниках. Поэтому до недавнего времени измерения по P-коду могли выполнять только пользователи, получившие разрешение Министерства обороны США. Однако и это "тайное" стало "явным" в результате утечки секретной информации, после чего к P-коду получил доступ широкий круг специалистов. Американское оборонное ведомство предприняло меры дополнительной защиты P-кода: в любой момент без предупреждения может быть включен режим AS (Anti Spoofing). При этом выполняется дополнительное кодирование P-кода, и он превращается в Y-код. Расшифровка Y-кода возможна только аппаратно, с использованием специальной микросхемы (криптографического ключа), которая устанавливается в GPS - приемнике.
Кроме того, для снижения точности определения координат несанкционированными пользователями предусмотрен так называемый "режим выборочного доступа" SA (Selective Availability). При включении этого режима в навигационное сообщение намеренно вводится ложная информация о поправках к системному времени и орбитах ИСЗ, что приводит к снижению точности навигационных определений примерно в 3 раза.
Поскольку P - код передается на двух частотах (L1 и L2), а C/A-код - на одной (L1), в GPS-приемниках, работающих по P-коду, частично компенсируется ошибка задержки сигнала в ионосфере, которая зависит от частоты сигнала. Точность автономного определения расстояния по P - коду примерно на порядок выше, чем по C/A-коду.
Сегмент управления
Содержит главную станцию управления (авиабаза Фалькон в шт. Колорадо), пять станций слежения, расположенных на американских военных базах на Гавайских островах, островах Вознесения, Диего - Гарсия, Кваджелейн и Колорадо - Спрингс и три станции закладки:острова Вознесения, Диего - Гарсия, Кваджелейн (Рис. 5). Кроме того, имеется сеть государственных и частных станций слежения за ИСЗ, которые выполняют наблюдения для уточнения параметров атмосферы и траекторий движения спутников.
Собираемая информация обрабатывается в суперкомпьютерах и периодически передается на спутники для корректировки орбит и обновления навигационного сообщения.
Аппаратура потребителей
В аппаратуре потребителя (GPS-приемнике) принимаемый сигнал декодируется, т. е. из него выделяются кодовые последовательности C/A либо C/A и P, а также служебная информация. Полученный код сравнивается с аналогичным кодом, который генерирует сам GPS-приемник, что позволяет определить задержку распространения сигнала от спутника и таким образом вычислить псевдодальность. После захвата сигнала спутника аппаратура приемника переводится в режим слежения, т. е. в БПС поддерживается синхронизм между принимаемым и опорным сигналами. Процедура синхронизации может выполняться:
- - по C/A-коду (одночастотный кодовый приемник), - по Р - коду (двухчастотный кодовый приемник), - по C/A-коду и фазе несущего сигнала (одночастотный фазовый приемник), - по Р - коду и фазе несущего сигнала (двухчастотный фазовый приемник).
Используемый в GPS-приемнике способ синхронизации сигналов является едва ли не важнейшей его характеристикой.
Способы наблюдений
Сложная структура сигнала, передаваемого от ИСЗ к приемнику, обусловила многообразие способов его обработки и наблюдений.
Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках. Из принятого со спутника сигнала частоты L1 выделяется C/A-код (тогда приемник называется одночастотным) или из частотных сигналов L1 и L2 выделяется P-код (двухчастотный приемник). Производится сравнение соответствующего кода с эталонным кодом, который генерирует сам приемник. Точность определения координат при этом составляет:
- - для одночастотного (L1) приемника - 100м; - для двухчастотного (L1, L2) приемника - 16м.
Значения точностей приведены для неблагоприятного режима измерений, когда включен режим "ограниченного доступа" SA.
Фазовые наблюдения выполняются для повышения точности измерений. В этом случае при сравнении принятого со спутника сигнала и его эталона, генерируемого в приемнике, учитывается не только код, но и фаза несущей частоты (L1 или L2). Поскольку период несущей частоты в сотни (для P-кода) и тысячи (для C/A-кода) раз меньше периодов кодовых последовательностей, точность процедуры сравнения значительно повышается, а, следовательно, возрастает точность измерения координат. Однако в этом случае возникает проблема целочисленной фазовой неоднозначности, поскольку отсутствует информация о количестве целых периодов информационного сигнала, укладывающихся на пути ИСЗ - приемник. Непосредственно можно измерить только дробную часть фазовой задержки сигнала (в пределах одного периода). Для решения этой проблемы используют несколько способов:
- - классический двухэтапный метод измерений, который предполагает на первом этапе выполнение большого количества избыточных измерений, а на втором - статистический анализ полученных данных и определение наиболее вероятного значения фазовой неоднозначности; - модификация классического метода, которая отличается тем, что при обработке результатов измерений производится многоэтапная калмановская фильтрация и выбирается группа фильтров Калмана с оптимальными свойствами; - метод замены антенн, когда наблюдения выполняются двумя различными приемниками на двух пунктах в две различные эпохи. При измерениях во вторую эпоху производится замена антенн приемников; - метод определения неоднозначности "в пути", когда для определения целого числа периодов используют линейные комбинации сигналов L1 и L2 (суммы и разности). - О спутниках - Первый спутник для работы GPS был запущен в феврале 1978 года. Сегодня система включает в себя 28 спутников. Для покрытия земного шара необходимо только 24 спутника, остальные выступают в качестве запасных. Спутники распределены по шести орбитам на высоте около 20 000 км (по четыре спутника на каждой орбите) и имеют наклон 55° по отношению к экватору. Они движутся со скоростью около 3 км/с (два оборота вокруг Земли менее чем за сутки). Такая конфигурация системы позволяет принимать сигнал сразу от нескольких спутников практически в любом месте Земли (за исключением некоторых приполярных областей). Вес каждого спутника около тонны, а размер с раскрытыми солнечными батареями - около 5 м. Мощность передатчика порядка 50 Вт. Каждый спутник рассчитан на работу в течение десяти лет. Новые спутники запускаются на орбиту по мере необходимости, например в случае выхода из строя или необходимости провести профилактические работы. Функционирование системы запланировано до 2006 года. - Как это работает - Прежде чем мы приступим к описанию принципов работы GPS, придется ознакомиться с некоторыми терминами и даже вспомнить формулы из школьного курса физики. - Задача трилатерации... - Итак, задачей трилатерации (триангуляции) является вычисление координат объекта путем измерения его удаленности от точек с заданными координатами. В нашем случае объектом является GPS-приемник, а точками с заданными координатами - три спутника системы GPS. Впрочем, обо всем по порядку. - Каким образом становятся известны координаты спутников? Министерство Обороны США имеет четыре станции слежения, три станции связи и центр управления для контроля орбит и координат спутников. Станции слежения непрерывно отслеживают спутники и передают данные в центр управления. В центре управления вычисляются уточненные элементы орбит и коэффициенты поправок спутниковых часов. Эти данные составляют так называемый альманах, который передается по каналам станций связи на спутники.
Рис.3. Прием сигналов от одного спутника
Рис.4. Сигнал от второго спутника позволяет уточнить положение объекта
- - Перейдем непосредственно к задаче определения координат. Предположим, что расстояние А (рис.3) до одного спутника известно. Тогда мы можем описать вокруг него сферу заданного радиуса. Но координаты объекта (GPS-приемника) определить невозможно, так как известно лишь то, что он находится где-то на поверхности описанной сферы. Если известно расстояние В и до второго спутника, то объект находится на окружности, образованной пересечением двух сфер (рис.4). - Третий спутник позволяет определить две точки на окружности (рис. 5).
Рис.5. Третий спутник ограничивает выбор двумя точками
- - Теперь нам остается выбрать правильную точку. Одна точка может быть отброшена, так как находится внутри Земли или высоко над ней. Таким образом, получив данные от трех спутников, можно узнать координаты объекта. Также окончательную точку можно выбрать, сверив с данными от четвертого спутника. Но не все так просто, как кажется на первый взгляд. Приведенные рассуждения актуальны для случая, когда расстояния до спутников известны с абсолютной точностью. Как же определяются эти расстояния и что является источником вносимой погрешности? - ... и не только - Задачей дальнометрии является определение расстояние до объекта по временной задержке распространения радиосигнала от него. Используется всем известная со школьной скамьи формула х =V * t (расстояние равно скорости, умноженной на время). Каждый спутник передает радиосигналы с заданной частотой. Для гражданских целей используется частота F1 = 1575.42 MHz. Для военных целей - частота F2 = 1227.60 MHz. Передаваемый сигнал модулируется псевдослучайным кодом (PRN). Существует грубый код - С/А-код (Coarse Acquisition code), используемый в гражданских приемниках, и точный P-код (Precision code), используемый в военных целях и иногда для нужд геодезии и картографии. На спутнике и в приемнике одновременно генерируется одинаковый PRN. Получив сигнал, GPS-приемник определяет временную задержку и, умножая эту цифру на скорость света (скорость распространения радиоволн), вычисляет расстояние до спутника. - Чтобы расстояние было вычислено точно, необходима идеальная синхронизация часов на спутнике и в приемнике, что достигается за счет применения атомных часов, находящихся на борту спутника. Естественно, что устанавливать такие часы в каждый GPS-приемник невозможно. Поэтому для получения точных координат применяют некоторую избыточность в данных. Например, для определения координат используют данные от четырех или более спутников. Получив сигналы от нескольких спутников, приемник ищет точку пересечения соответствующих окружностей и, если такую точку не находит, то компьютер в приемнике начинает корректировать время методом последовательных итераций до тех пор, пока не сведет все измерения к одной точке. Таким образом, чем больше спутников, тем точнее измерение. Стандартные гражданские GPS-приемники могут принимать сигналы от двенадцати спутников одновременно. При этом спутники выведены на орбиту таким образом, чтобы по крайней мере четыре из них приемник "видел". - Кроме навигационных сигналов спутники передают на приемник служебную информацию. Мы уже упомянули об альманахе, содержащем данные об орбитах и координатах спутника. Существует понятие эфимериса - данные, содержащие важную информацию о рабочем состояние спутника, текущей дате и времени. - Точность не для всех - В период становления Navstar GPS Министерство Обороны США приняло решение о закрытии доступа к высокоточным навигационным данным гражданским пользователям. В начале 80-х годов Рональд Рейган заявил, что GPS будет доступна каждому, но наибольшая точность будет оставлена для военных. Был создан алгоритм Избирательного доступа (Selective Availability или S/А) и шифрования Р-кода (Anti-Spoofing или А/S). Избирательный доступ позволял искусственно вносить погрешность в координаты. - Осуществлялось это двумя способами. Во-первых, искусственные ошибки вносились в навигационные данные, передаваемые со спутника. Во-вторых, намеренно искажали точность спутниковых часов. Все это приводило к ошибке в определении координат порядка 100 метров. - Но постепенно сектор гражданского пользователя GPS возрастал, и погрешность в 100 м не удовлетворяла многих. В примере с рыбаком такая погрешность все равно бы не позволила найти ему заветное рыбное место. Есть куда более ответственные ситуации, в которых такая погрешность оказывается роковой. - Возможно, военные также поняли, что нет особого смысла закрывать доступ к высокоточным навигационным данным, так как "высококвалифицированный злоумышленник" способен и так найти этот доступ. Как бы то ни было, 1 мая 2000 года Билл Клинтон сделал подарок всему народу. В своей речи президент США заявил следующее: "Сегодня я рад объявить, что начиная с полуночи США прекращает программу преднамеренного ухудшения точности гражданских сигналов системы GPS, так называемый "избирательный доступ"... Гражданские пользователи GPS получат возможность определять свои координаты в десять раз точнее чем они делали это раньше". - Но военные приберегли еще один метод, о котором говорилось выше, - шифрование P-кода (А/S). Зашифрованный P-код называется Y-кодом. Закрытие доступа к P-коду не позволяет двухчастотному приемнику, работающему с таким кодом, определить ионосферную задержку (задержка сигнала при прохождении через верхние слои атмосферы) в реальном времени, и решение задачи определения координат становится более грубым. - Ненамеренные ошибки - Одним из факторов, влияющим на точность данных, полученных GPS-приемником, является геометрия спутников: их расположение относительно друг друга. Если приемник получает данные от спутников, которые расположены только в каком-либо одном направлении, например западном, то триангуляция будет плохой и погрешность в определении координат высокой - порядка 100 м. Если же спутники расположены в разных направлениях, то геометрия будет хорошей и точность оптимальной. - Другим источником ошибок является блокировка спутникового сигнала различными объектами и его переотражение. - Дело в том, что переотраженному сигналу требуется больше времени для достижения приемника. Приемнику "кажется", что спутник находится на большем расстоянии, чем на самом деле. Из-за большой скорости распространения радиоволн, которая равна скорости света, вносимая ошибка невелика - всего она составляет около 5 м. - Источником погрешности могут служить неблагоприятные атмосферные условия, вызывающие задержку в прохождении сигнала. Проходя через ионосферу и тропосферу, скорость распространения сигнала уменьшается (скорость света константна только в вакууме). Ошибки в ходе атомных часов могут быть также источниками погрешностей.
Источники ошибок
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
- 1. Неточное определение времени. При всей точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени аппаратуры спутника. Она приводит к возникновению систематической ошибки определения координат около 0.6 м. 2. Ошибки вычисления орбит. Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м. 3. Инструментальная ошибка приемника. Обусловлена, прежде всего, наличием шумов в электронном тракте приемника. Отношение сигнал/шум приемника определяет точность процедуры сравнения принятого от ИСЗ и опорного сигналов, т. е. погрешность вычисления псевдодальности. Наличие данной погрешности приводит к возникновению координатной ошибки порядка 1.2 м. 4. Многопутность распространения сигнала. Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измеренное расстояние оказывается больше действительного. Аналитически данную погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение антенны приемника относительно препятствий. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2.0 м. 5. Ионосферные задержки сигнала. Ионосфера - это ионизированный атмосферный слой в диапазоне высот 50 - 500 км, который содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках). Линейные комбинации двухчастотных измерений не содержат ионосферных погрешностей первого порядка. Кроме того, для частичной компенсации этой погрешности может быть использована модель коррекции, которая аналитически рассчитывается с использованием информации, содержащейся в навигационном сообщении. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10 м. 6. Тропосферные задержки сигнала. Тропосфера - самый нижний от земной поверхности слой атмосферы (до высоты 8 - 13 км). Она также обуславливает задержку распространения радиосигнала от спутника. Величина задержки зависит от метеопараметров (давления, температуры, влажности), а также от высоты спутника над горизонтом. Компенсация тропосферных задержек производится путем расчета математической модели этого слоя атмосферы. Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные задержки вызывают ошибки измерения псевдодальностей в 1 м. 7. Геометрическое расположение спутников. При вычислении суммарной ошибки необходимо еще учесть взаимное положение потребителя и спутников рабочего созвездия. Для этого вводится специальный коэффициент геометрического ухудшения точности PDOP (Position Dilution Of Precision), на который необходимо умножить все перечисленные выше ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит от взаимного расположения спутников и приемника. Она обратно пропорциональна объему фигуры, которая будет образована, если провести единичные векторы от приемника к спутникам. Большое значение PDOP говорит о неудачном расположении ИСЗ и большой величине ошибки. Типичное среднее значение PDOP колеблется от 4 до 6.
Дифференциальный режим GPS
Наиболее эффективным средством исключения ошибок является дифференциальный способ наблюдений - DGPS (Differential GPS). Его суть состоит в выполнении измерений двумя приемниками: один устанавливается в определяемой точке, а другой - в точке с известными координатами - базовой (контрольной) станции.
Поскольку расстояние от ИСЗ до приемников значительно больше расстояния между самими приемниками, то считают, что условия приема сигналов обоими приемниками практически одинаковы. А, следовательно, величины ошибок также будут близки. В режиме DGPS измеряют не абсолютные координаты первого приемника, а его положение относительно базового (вектор базы). Использование дифференциального режима позволяет практически полностью исключить влияние режима SA и довести точность кодовых измерений до десятков сантиметров, а фазовых - до единиц миллиметров. Наилучшие показатели имеют фазовые двухчастотные приемники. Они отличаются от фазовых одночастотных более высокой точностью, более широким диапазоном измеряемых векторов баз и большей скоростью и устойчивостью измерений. Однако современные технологические достижения позволяют одночастотным фазовым приемникам по характеристикам приблизиться к двухчастотным.
Одной из особенностей режима DGPS является необходимость передачи дифференциальных поправок от базового приемника к определяемому. При этом различают два метода корректировки информации:
- 1. Метод коррекции координат, когда на станции и в определяемой точке наблюдают одни и те же ИСЗ, а затем в качестве дифференциальных поправок с базовой станции передают добавки к измеренным в определяемом пункте координатам. Недостатком этого метода является то, что приемники базового и определяемого пунктов должны работать по одному рабочему созвездию. Это неудобно, поскольку все потребители, использующие дифференциальные поправки должны работать по одним и тем же ИСЗ. В этом случае не обеспечивается наилучшее значение PDOP во всех определяемых пунктах. 2. Метод коррекции навигационных параметров, при использовании которого на базовой станции определяются поправки к измеряемым параметрам (например, псевдодальностям) для всех спутников, которые потенциально могут быть использованы потребителями. Эти поправки передаются на определяемые пункты, где уже непосредственно в GPS - приемнике вычисляются поправки к координатам. Недостатком этого метода является повышение сложности аппаратуры потребителей.
Метод DGPS может быть использован двояко. Если необходимо вычислять координаты в режиме реального времени, то необходим надежный радиоканал для передачи дифференциальных поправок, а в состав GPS - приемника должен входить радиомодем. Если же передача поправок не выполняется, то можно использовать режим постобработки. В этом случае результаты измерений обоих приемников записываются на устройства памяти приемников (например, магнитные карты), а после прекращения измерений накопленная информация обрабатывается специальным ПО и вычисляется точное значение вектора базы.
Передача дифференциальных поправок по радиоканалу может выполняться по выделенным частотным линиям, на частотах любительских радиостанций, по системам спутниковой связи (например, INMARSAT), а также с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах FM - радиостанций. Причем иногда даже нет необходимости иметь GPS - приемник на базовой станции, поскольку во многих странах уже действует развитая сеть DGPS - станций, постоянно транслирующих поправки на определенную территорию. Например, в прибрежной зоне Северной Америки, Европы, Австралии и Новой Зеландии развернуты сети радиомаяков для морской DGPS - навигации. Американская корпорация DCI (Differential Corrections Inc.) распространяет дифференциальные поправки на всю континентальную часть США, используя для ретрансляции радиосигналов спутники связи Galaxy. Подобные сети станций действуют и на территориях многих европейских стран.
Примером подобной сети может служить шведская сеть станций DGPS, которая носит название SWEPOS. В ее состав входят 21 станция (Reference Station).
Станции равномерно разбросаны по всей территории Швеции. Координаты точек земной поверхности вычисляются в системе SWEREF 93, которая является шведским вариантом EUREF 89. Система SWEREF 93 с точностью до метра совпадает с WGS 84. Кроме того, точно известны параметры перехода в национальную плановую (RT 90) и высотную (RH 70) системы координат. Система SWEPOS может использоваться как в реальном времени, так и в режиме постобработки. Для определения координат в режиме реального времени могут использоваться сигналы только двенадцати станций. На этих станциях (SWEPOS reference station) непрерывно производятся GPS-измерения, а их результаты передаются в центр управления (Control Centre). Полученные дифференциальные GPS - поправки передаются пользователям системы на FM - частотах через систему Epos компании Teracom и ретранслятор (P3 transmitter).
При этом достигается точность определения плановых координат на уровне метра. Кроме того, точность зависит от типа сервиса Epos: базовый (Basic) или улучшенный (Premium). Доступ к системе SWEPOS осуществляется по подписке.
Для определения координат точек местности в режиме постобработки необходимо иметь данные не менее, чем четырех станций SWEPOS. При этом может быть достигнута сантиметровая точность результатов в координатной системе SWEREF 93. При этом продолжительность измерений двухчастотным приемником должна быть не менее двух часов. Вообще, точность измерений зависит от длительности измерений, типа приемника и антенны, а также программного обеспечения, используемого для обработки данных. Например, при использовании одночастотного фазового приемника можно получить метровую точность результатов при продолжительности измерений порядка нескольких минут. Данные о дифференциальных GPS-поправках, полученные после обработки сигналов всех станций, доступны пользователям (User) спустя 4 часа после окончания измерений. Информация может быть передана с центра управления (Control Centre) через Internet или по каналам модемной связи.
Примером глобальной сети DGPS - поправок может служить система OmniSTAR (Рис.). Она использует сеть станций (1) для сбора информации об ошибках, вводимых в GPS - сигнал Министерством обороны США.
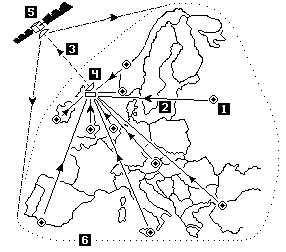
Рис. Система OmniSTAR
Собранные данные распределяются одним из центров управления сетью (4). Всего существует 3 центра управления сетью OmniSTAR по всему миру. Оттуда данные передаются на борт к одному из семи геостационарных спутников (5), распределенных по всей земной поверхности. Далее каждый спутник передает данные о дифференциальных GPS-поправках в пределах своей области обслуживания (6). Сигналы поправок системы OmniSTAR могут быть получены через радиоканал GPS-приемником и доступны по подписке.
Сеть OmniSTAR обладает устойчивостью и избыточностью:
- 1. Все станции сбора информации имеют дублированные каналы связи с соответствующим центром управления сетью; 2. Европейский спутник использует два канала, переключение между которыми осуществляется автоматически; 3. Европейский континент имеет два уровня обслуживания дифференциальными GPS - поправками; 4. Формируемые системой OmniSTAR поправки не зависят от какой - либо конкретной станции; 5. Сигнал системы OmniSTAR сигнал не подвержен влиянию гроз или электрических полей.
Работа сети непрерывно контролируется центрами управления сетью. Имеются два различных типа подписки на систему OmniSTAR: VBS (Virtual Base Station) и VRC (Virtual Reference Cell).
VBS - подписка. Внутри приемника рассчитывается оптимальная для данного положения приемника дифференциальная поправка. При этом используется информация от всех станций сбора данных. Такая методика называется технологией Виртуальной Базовой Станции (VBS). Использование VBS-подписки гарантирует суб-метровую точность в пределах большой области и обеспечивает избыточность системы. Величины поправок не зависят от сигналов какой-либо конкретной станции - выполняется интегрированная обработка сигналов от всех станций. В свою очередь, VBS - подписка подразделяется на такие типы:
- - OmniSTAR VBS 2000 - может использоваться в любой точке европейской зоны действия системы; - OmniSTAR VBS 200 - доступна в пределах круга радиусом 200 км. Локализация центра круга может быть определена пользователем. - OmniSTAR VBS 20 - может использоваться в круге с радиусом 20 км. Локализация центра круга также определяется пользователем.
VRC - подписка. Данный вид подписки является более дешевым вариантом для пользователя, постоянно работающего в пределах ограниченной территории. При этом для формирования сигналов дифференциальных поправок используются сигналы всех станций, но поправки пересчитываются не на любую точку местонахождения пользователя, а только на одну указанную пользователем точку. С удалением от этой точки точность ухудшается. Зона действия системы OmniSTAR захватывает почти всю поверхность земного шара.
Система подписки достаточно гибка. Для постоянных пользователей системы используется годовая подписка. Для тех, кто не использует сигнал OmniSTAR постоянно, доступны 100, 200 или 300- часовые подписки. Учет наработанного времени ведется с помощью электронного счетчика, встроенного в приемник. Для тестирования приемника пользователем при его покупке счетчик выставляется на 20 ч. Возобновление или продление подписки можно выполнить через каналы спутниковой связи.
Приемники системы OmniSTAR. Ряд DGPS приемников 3000L представляет собой результат многолетних научно-исследовательских работ. Приемники выполнены по самой последней технологии. Они имеют высокий уровень интеграции и высокий уровень помехозащищенности. На рынке представлено несколько разновидностей данного ряда приемников:
- 3000LR8 - в добавление к предыдущей модели содержит встроенный 8-канальный GPS - приемник. 3000LR12 - аналогичен 3000LR8, только имеет 12- канальный приемник. Другим классом приемников системы OmniSTAR являются полнофункциональные модульные OEM - приемники, которые устанавливаются как блоки в составе другого оборудования. Например, приемник 3000LM имеет вход антенны, входы/ выходы источника питания и интерфейса для обмена данных, а также светодиодные индикаторы состояния прибора. Другие разновидности приемников этого класса - 3000LCC и 3000LCE.
Новый приемник 7000L представляет собой полнофункциональный DGPS - приемник со встроенной антенной Он может устанавливаться на крыше автомобиля.
Приемники системы OmniSTAR позволяют выполнять настройку и управлять конфигурацией через порт ввода/вывода, т. е. система, в состав которой входит такой приемник, способна управлять им через программное обеспечение. Кроме того, через тот же самый порт может осуществляться ввод/вывод данных.
В случае, когда пользователь работает в зоне действия более, чем одного центра управления сетью, система автоматически производит необходимые переключения в соответствии с текущим положением пользователя. На участках земной поверхности, где сигнал системы резервируется, могут осуществляться автоматические переключения пользователя на резервное обслуживание, если основной сигнал передается с помехами.
В настоящее время ведутся работы по реализации общеевропейского радионавигационного плана. Разработан специальный стандарт пересылки поправок DGPS, который называется RTCM SC - 104. Все производители GPS - приемников используют его для реализации дифференциального режима работы своей аппаратуры.
В геодезических приложениях нашли применение исключительно дифференциальные методы GPS - измерений, поскольку только с их использованием возможно определение координат точек местности с требуемой точностью.
Имеется несколько методов выполнения наблюдений. Выбор конкретного метода зависит от следующих факторов:
- - требуемый уровень точности; - технические возможности приемника и наличие соответствующего программного обеспечения; - характер окружающей местности и метеоусловия (радиопомехи, рельеф, гроза); - наличие ограничений на переезд между наблюдаемыми пунктами и расстояние между ними; - конфигурация спутниковой системы и количество наблюдаемых спутников, наличие средств связи.
Для решения различных задач: определения точных координат отдельных точек, последовательных измерений местоположения множества точек, непрерывных координатных определений в процессе движения автомобиля и др. - в рамках DGPS - режима разработан ряд методов выполнения измерений. Эти методы отличаются технологией выполнения работ и получаемой точностью вычисления вектора базы.
Статический метод (Static Positioning)
Название метода означает, что приемники не перемещаются в течение всего наблюдательного интервала. Базовый приемник и приемник с неизвестными координатами одновременно выполняют наблюдения и записывают данные в течение 15 минут - 3 часов. Такая длительность сессии вызвана необходимостью определения целочисленной неоднозначности фаз в начале сессии. Этому способствует и заметное изменение со временем конфигурации спутниковой системы. Одночастотные приемники используются для измерения баз длиной до 10-15 км, а двухчастотные - для баз длиннее 15 км (преимущества двухчастотных приемников заключаются в возможности адекватного моделирования эффекта воздействия ионосферы, а также меньшей продолжительности наблюдений для достижения заданной точности). После завершения сеансов наблюдений данные, полученные каждым приемником, собираются вместе, вводятся в компьютер и обрабатываются с помощью специальных программ с целью определения неизвестных координат пунктов.
Точность метода при использовании фазовых наблюдений:
- 1. Для двухчастотных приемников:
- O в плане: 5 мм + 1 мм/км * D; O по высоте: 10 мм + 1 мм/км * D;
- O в плане: 5 мм + 1 мм/км * D - (при D < 10 км); o 5 мм + 2 мм/км * d - (при d > 10 км); O по высоте: 10 мм + 2 мм/км * D).
Данный метод используют для решения задач контроля национальных и континентальных геодезических сетей, мониторинга тектонических движений земной поверхности, наблюдения за состоянием дамб, фундаментов атомных электростанций и др. сооружений.
Псевдостатический метод (Pseudo-Static Positioning)
Отличается от статического тем, что обеспечивает более высокую производительность съемки за счет выполнения наблюдений в течение нескольких коротких сессий вместо одной длинной. Один приемник непрерывно наблюдает на базовом пункте. Перевозимый приемник после наблюдений в течение 5 - 10 минут на определяемом пункте выключается и перевозится на следующий определяемый пункт, где вновь включается на 5 -10 минут. Затем вновь выключается и перевозится на следующий пункт и т. д. Каждый определяемый пункт необходимо посетить еще раз на 5 минут через 1 час после первого посещения. Этот метод практически эквивалентен статическому, но вместо того, чтобы ожидать в течение 1 часа изменения конфигурации спутников, наблюдения проводятся в течение 5 минут, а следующие 5 минут наблюдаются одним часом позже, когда конфигурация существенно изменилась. Остающиеся 55 минут можно использовать для посещения дополнительных неизвестных пунктов. Точность получаемых результатов будет на уровне статического метода. Для наблюдений могут использоваться как одночастотные, так и двухчастотные приемники. Метод удобен, когда необходимо в течение короткого времени произвести точное измерение координат большого количества точек. Недостатком метода является необходимость точного планирования графика посещения пунктов.
Быстростатический метод (Rapid Static Positioning)
Этот метод был разработан в последние годы. Он позволил значительно увеличить производительность GPS съемки. Метод отличается от псевдостатического тем, что достаточно лишь одного посещения определяемых пунктов (в течение 5-10 минут - в зависимости от расстояния между опорным и определяемым пунктами). Поначалу, на этапе появления данного метода, для наблюдений подходили лишь двухчастотные Р - кодовые приемники. В настоящее время некоторые одночастотные приемники можно также использовать в быстростатическом режиме.
Кинематический метод "стой-иди" (Stop-and-Go Kinematic Positioning)
Метод позволяет получить положения пунктов так же быстро, как и в случае использования электронного тахеометра при решении топографических задач. Метод требует выполнения короткой процедуры инициализации с целью определения целочисленных неоднозначностей фаз. После этого опорный приемник продолжает непрерывно наблюдать на пункте с известными координатами, второй приемник перевозится (во включенном состоянии) на первый определяемый пункт, где вновь наблюдает 1 минуту. Затем он посещает все остальные определяемые пункты (лишь по одному разу).
Наиболее распространенными являются следующие процедуры инициализации:
- - обмен антеннами, когда второй приемник находится на "пункте обмена" (знание его координат не обязательно), выбранном на расстоянии не более 10 м от опорного, выполняется наблюдение 4-8 эпох, затем приемники переставляются (без выключения), меняясь антеннами и наблюдают 4-8 эпох (до нескольких минут), а после происходит обратная процедура обмена антеннами и выполнение наблюдений для 4-8 эпох; - стояние второго приемника в течение 1 минуты на втором пункте с известными координатами, причем этот второй пункт может быть на расстоянии не более 10 км от опорного пункта; - статический метод, когда определяемый пункт выбирается на расстоянии не более 10 км от опорного пункта, а сеанс наблюдений имеет продолжительность не менее 30 минут.
Недостаток метода состоит в необходимости непрерывного (и даже во время движения) наблюдения не менее 4 спутников одновременно. Если число наблюдаемых спутников падает до трех хотя бы на миг, необходимо вернуться на последний успешно посещенный определяемый пункт или вновь провести процедуру инициализации. Во избежание этого лучше всего обеспечить возможность наблюдения одновременно пяти или более спутников.
Точность метода при использовании фазовых наблюдений:
- 1. Для двухчастотных приемников (5 спутников и две эпохи (2 сек ) наблюдений):
- O в плане: 20 мм + 1 мм/км * D; O по высоте: 20 мм + 2 мм/км * D;
- O в плане: 20 мм + 2 мм/км * D; O по высоте: 20 мм + 2 мм/км * D.
Метод эффективен при выполнении топографической съемки, когда за короткое время необходимо определить координаты большого числа точек, при построении цифровых моделей рельефа, определении местоположения объектов местности, имеющих форму ломаной линии (трубопроводы, дороги и пр.).
Кинематический метод со статической инициализацией (Kinematic with Static Initialization)
Метод очень похож на предыдущий. Точно так же на базовом пункте с известными координатами производится процедура инициализации, затем подвижный приемник перемещается в начальную точку маршрута движения и производит там наблюдения в течение нескольких минут. Далее подвижная платформа с приемником начинает движение по маршруту. GPS - измерения выполняются непрерывно во время движения с интервалом 1 сек. Точностные параметры метода те же, что и у "Stop-and-Go". Чаще всего применяется для получения координат линейных объектов типа дорог, рек и т. д.
Кинематический метод с инициализацией "на ходу" (Kinematic with On - the Fly Initialization)
Данный метод не требует для инициализации размещения подвижного приемника на базовой станции - эта процедура выполняется непосредственно при движении транспортного средства по маршруту. Кроме того, если по какой - либо причине произошел срыв наблюдений (например, из-за проезда под железнодорожным мостом), процесс инициализации производится вновь без остановки движения. Точностные параметры и сферы использования метода не отличаются от других кинематических методов.
Диспетчерские службы. Очень широкое распространение в мире получили системы автоматического определения координат движущихся объектов на основе GPS или системы GPS/AVL (Automatic Vehicle Location). С их помощью на современном уровне решаются задачи диспетчеризации транспортного парка. Каждый автомобиль оснащается GPS - приемником и радиосвязным оборудованием, обеспечивающим передачу информации на диспетчерский пункт. На экране монитора диспетчера с использованием программного обеспечения ГИС формируется электронная карта территории, которая обслуживается транспортными средствами. Данные о координатах и скорости движения автомобилей, полученные по радиоканалу, позволяют отобразить их текущее положение на этой карте. Помимо координатной информации по радиосвязной линии могут передаваться сигналы различных датчиков, установленных на автомобиле и другая информация. Возможности системы:
- 1. Диспетчер отслеживает в реальном времени перемещения всех автомобилей. 2. На электронной карте выделяются зоны, при попадании автомобилей в которые подается сигнал диспетчеру. 3. При отклонениях автомобилей от заданного маршрута у диспетчера срабатывает сигнализация. 4. С диспетчерского пульта контролируется состояние датчиков, установленных на каждой подвижной единице: топливных, температурных, несанкционированного вскрытия контейнеров, переворачивания автомобиля, включения "мигалки" и т. д. 5. Стандартные сообщения водителя могут быть запрограммированы так, что при нажатии соответствующей кнопки в автомобиле к диспетчеру поступает информация типа: "пробка на дороге", "попал в аварию", "задержан милицией", "нападение", "захват". Эти сообщения при необходимости легко кодируются и могут использоваться в случаях, когда надо соблюдать режим радиомолчания. 6. По команде с диспетчерского пункта блокируется система зажигания, двери салона автомобиля и контейнера. 7. В кабине автомобиля может быть установлен специальный бортовой компьютер, работающий в режиме терминала. Кроме текстовых сообщений между водителем и диспетчером передаются специальные формы (накладные, маршрутные листы и пр.). 8. Моделирующие возможности ГИС диспетчера позволяют оптимизировать маршруты доставки грузов с учетом различных факторов.
Некоторые примеры использования GPS/AVL систем приведены ниже.
Компания SonyMobileComm разработала GPS/AVL систему NVX-F160 с программным обеспечением EtakGuide. Автомобили оборудованы 8-канальными GPS - приемниками, которые опрашиваются с частотой 1 Гц. Карты 48 штатов территории США, схемы 32 главных американских дорог, планы 1000 парков и 5000 мест отдыха записаны на прилагаемом компакт-диске. Фирмы TeleAtlas и Philips Car Systems подписали соглашение о совместном производстве подобных компакт-дисков с цифровыми картами различных территорий.
Система Priority One (разработка американской фирмы Greenfield Associates), кроме стандартных AVL - функций, обеспечивает водителю приоритетный проезд через самые сложные участки дорог в пределах города. Для определения оптимального пути движения используется информация о координатах и скорости автомобиля, а также возможных альтернативных маршрутах и загруженности перекрестков. Установленный на автомобиле 12-канальный GPS - приемник фирмы Canadian Marconi обеспечивает в дифференциальном режиме точность определения координат не хуже 5 м.
Диспетчерские GPS - системы используются в службе инкассации ИНКОМБАНКа (г. Москва), некоторых управлениях МВД России и Казахстана, специальном техническом управлении МЧС России.
Проблемы
В условиях Украины существуют проблемы реализации GPS - технологий. При покупке GPS - систем должны учитываться следующие моменты:
- 1. Практически все работы, которые могут выполняться с использованием GPS, подлежат лицензированию (Постановление Кабинета Министров Украины № 1075 от 13.07.98). 2. При реализации DGPS в режиме реального времени необходимо получить разрешение на использование соответствующей частоты радиодиапазона для передачи дифференциальных поправок. Лицензирование одной частоты, как известно, у нас стоит около 5 тыс. USD. Спутниковые каналы связи обходятся еще дороже. Можно, конечно, использовать любительские частотные каналы, однако при этом снижается качество передачи, что может сказаться на точности измерений. 3. Некоторые западные фирмы продают GPS - приемники со встроенной аппаратурой передачи дифференциальных поправок, частоты которой фиксированы. Вполне возможно, что эти частоты у нас уже заняты, поэтому такой приемник не сможет реализовать DGPS - режим в реальном времени. 4. В Украине значительное количество радиоаппаратуры различного назначения вещает в диапазоне частот L1 и L2, поэтому выполнение GPS - измерений в районах действия этой аппаратуры будет затруднено.
Перспективы использования GPS
Уже начиная с 1993 года различные государственные и научные организации США ведут исследования касательно перспектив использования GPS. В результате в 1993 г. был выпущен совместный документ Министерства обороны (МО) США и Министерства транспорта (МТ) США "Использование GPS для решения военных и гражданских задач". В документе подчеркивается:
- - финансирование всей системы будет продолжать осуществляться из бюджета МО США; - развитие гражданских приложений будет финансироваться МТ США; - предполагается развивать глобальные сети дифференциальных поправок DGPS (что сейчас очень активно делается); - развитие общественных сетей DGPS будет финансироваться государственным бюджетом, а приватные сети поддерживаться не будут; - предполагается расширить комплекс мероприятий по дальнейшему использованию GPS в целях мирового сообщества.
Приложение: Основные технические характеристики некоторых GPS - приемников
|
Название прибора |
Фирма (страна) |
Точность опред. pасстояний (статич. реж.) |
Рабочие частоты |
Количество каналов |
Ориент. Цена, USD |
|
4600 LS Surveyor |
Trimble Navigation (США) |
5 мм + 1 мм/км |
L1 |
8 - 12 |
7,500 |
|
Land Surveyor Si |
Trimble Navigation (США) |
5 мм + 1 мм/км |
L1 |
9 - 12 |
18,900 |
|
4000 SSE Geodetic Surveyor |
Trimble Navigation (США) |
5 мм + 1 мм/км |
L1, L2 |
9 - 12 |
33,000 |
|
SR 261 |
Leica AG (Швейцария) |
5 мм + 2 мм/км |
L1 |
6 |
18,000 |
|
Geotracer 2100 |
Geotronics AB (Швеция) |
5 мм + 1 мм/км |
L1 |
12 |
13,000 |
|
GePoS RS 12 |
Carl Zeiss GMBH (Германия) |
5 мм + 1 мм/км |
L1 |
12 |
8,600 |
|
GSSR1A |
Sokkia (Япония) |
5 мм + 2 мм/км |
L1 |
GPS (Global Positioning System) - глобальная система местоопределения (навигации). Не
GPS приемники
GPS-приемник -- радиоприемное устройство для определения географических координат текущего местоположения антенны приемника, на основе данных о временных задержках прихода радиосигналов, излучаемых спутниками группы NAVSTAR.
Максимальная точность измерения составляет 3-5 метров, а при наличии корректирующего сигнала от наземной станции -- до 1 мм (обычно 5-10мм) на 1 км расстояния между станциями (дифференциальный метод). Точность коммерческих GPS-навигаторов составляет от 150 метров (у старых моделей при плохой видимости спутников) до 3 метров (у новых моделей на открытом месте). Кроме того, при использовании систем SBAS и местных систем передачи поправок точность может быть повышена до 1-2 метров по горизонтали. До 1 мая 2000 года точность искусственно занижалась путем внесения в передаваемые спутником данные помех.
На базе GPS-приемников создаются как самостоятельные устройства -- GPS-навигаторы, GPS-трекеры, имеющие собственный процессор для необходимых расчетов и (в основном, у навигаторов) дисплей для отображения информации, и GPS-приставки к КПК и ноутбукам, которые бывают беспроводные (BlueTooth) и проводные (USB, RS-232). Последние также жаргонно называют GPS-мышками из-за внешнего сходства с компьютерными мышами. Помимо этих устройств, для GPS-навигации используются онбордеры (встроенные автомобильные компьютеры).
Оборудование условно делится на пользовательское и профессиональное. Профессиональное отличается качеством изготовления компонент (особенно антенн) и ПО, поддерживаемыми режимами работы (например RTK, binary data output), рабочими частотами (L1+L2), алгоритмами подавления многолучевости, солнечной активности (влияние ионосферы), поддерживаемыми системами навигации (например GPS -- ГЛОНАСС приемники) и, разумеется, ценой. Приемники бывают одноканальными и многоканальными.
Одноканальным GPS приемникам приходиться осуществлять последовательно захват каждого GPS спутника. По этому каналу осуществляется как слежение за спутниками, так и передача технической информации о состоянии спутника и системы в целом.
Похожие статьи
-
Не будет преувеличением сказать, что толчок к развитию навигации с использованием космических аппаратов дал запуск в СССР первого искусственного спутника...
-
Задачи определения местонахождения автомашин, других транспортных средств, ценных грузов и т. д. крайне актуальны как для государственных органов, так и...
-
Уникальность сенсорной сети WayNet - объединение в одном чипе возможностей: ???наземной и подземной навигации с высокой точностью (до ± 0,5...
-
Проблема пробок остро стоит во многих странах мира, а попытки ее разрешить многочисленны и разнообразны. Во многих странах Европы и в Японии созданы...
-
Прогноз великого классика подтвердила Эльвира Набиуллина, министр экономического развития и торговли РФ, заявив, что, если не изменить подход к...
-
Из всего вышеизложенного следует что, практически все применяемые в настоящее время меры упорядочения движения исходят из молчаливого признания...
-
Спутниковый мониторинг транспорта, основан на использовании глобальных телеметрических навигационных спутниковых систем, таких как GPS и ГЛОНАСС....
-
В основе СНС заложен принцип измерения расстояний до спутников. Это значит, что для определения местоположения ВС на земной поверхности нужно измерить...
-
Итак, пробок можно избежать, а пропускную способность магистрали можно увеличить многократно за счет изменения пространственного расположения полос...
-
Дорожные пробки стали актуальными проблемами в больших городах мира. В дорожных пробках приходится стоять часами. Решение этой проблемы -- задача...
-
Разделить обслуживаемую территорию на макро-зоны можно двумя способами: статистическим, основанным на измерении статистических параметров распространения...
-
1. Сетевые спутниковые радионавигационные системы. - М.: Радио и связь, 1992. 2. Болдин В. А. Современные глобальные радионавигационные системы...
-
Использование информационной избыточности - Структурные методы повышения точности средств измерения
Под информационной избыточностью понимается такое состояние измерительной информации, при котором она больше необходимой для реализации функций...
-
Современные технологии, используемые для решения задач, связанных с планирование грузовых автомобильных перевозок, в логистике позволяют значительно...
-
Фоны, их общая характеристика - Оптико-электронные (квантовые) системы и устройства
Основные свойства фонов рассмотрим для классов ОЭС, работающих на естественных оптических трассах в приземном слое воздуха, с авиационных и космических...
-
Выбор системы методом иерархий - Корпоративная система связи с использованием сетевой телефонии
Из всего множества систем выбираем 4 тех, которые имеют оптимальное соотношение между функциональными возможностями и стоимостью. Пусть, в результате...
-
Беспроводные сети - Корпоративная система связи с использованием сетевой телефонии
Технология передачи информации между абонентами, находящимися друг от друга на значительных расстояниях, постепенно, но уверенно, переходит с рельс...
-
Общие принципы построения сети Интернет и протокола IP - IP-телефония и традиционные телефонные сети
О технологии и сети Интернет и используемом в ней протоколе IP имеется огромное количество информации, как в самом Интернете, так и в печатных изданиях,...
-
Принципы построения ВОСПИ Оптические волокна производятся разными способами, они обеспечивают передачу оптического излучения на разных длинах волн, имеют...
-
Общие принципы Управление потоками в коммуникационных сетях обозначает регулировку скорости отправки данных в сеть с целью достижения максимального...
-
Для повышения помехоустойчивости приема дискретных двоичных сообщений, решение о переданном символе принимается не по одному отсчету на длительности...
-
Протокол МАС - Беспроводный доступ к Интернет
Длительность базовой части кадра для передачи информации в радиоинтерфейсе фиксирована и равна 2 мс. Кадр также содержит поля управления: безадресной...
-
Спутниковая дальнометрия и точная временная привязка - Спутниковые навигационные приемники
Расстояние до спутника определяется по измеренному времени прохождения радиосигнала от спутника до приемника, умноженного на скорость света (300000...
-
Рассмотрим методику планирования маршрутов автотранспортной доставки продукции группы компаний "Лактика" в Санкт-Петербурге и Ленинградской области с...
-
Основы линейного кодирования. Полученный в результате квантования и двоичного кодирования цифровой поток оптимален с точки зрения ошибок квантования, но...
-
Известно, что для точного определения площадей объектов недвижимости местоположения объектов на земной поверхности нужно знать координаты точек этих...
-
Работа аппаратуры Работа системы ДИСК-Б основана на управлении теплового излучения корпусов букс при движении поезда с последующим преобразованием его в...
-
Съемкой называется процесс геодезических измерений на местности, выполняемых для составления карт и планов. Различают следующие виды съемок: Теодолитная;...
-
ВВЕДЕНИЕ - Проект обобщенной структурной схемы системы передачи сообщений
Теория электрической связи (ТЭС), можно сказать, является первым специальным курсом, который ведет к дальнейшему изучению специальности. ТЭС -...
-
Выбор акустической системы и ее покупка - центральный и ответственнейший момент формирования вашей домашней аудиосистемы. Оно и понятно - ни один...
-
Структурированная кабельная система (СКС) - это единая инфраструктура, которая лежит в основе функционирования локальной сети здания или кампуса и...
-
Работа с системой MultiRCOS, Статусное окно системы - Микропроцессорная централизация Ebilock-950
Система MultiRCOS является клиент-серверной системой. Это означает, что работа программы разделена на две части - клиентскую и серверную. Серверная часть...
-
Принципы администрирования, или управления, СКС полностью определяется ее структурой. Различают одноточечное и многоточечное администрирование. Под...
-
Противопожарная безопасность - Корпоративная система связи с использованием сетевой телефонии
Противопожарные мероприятия. Пожар - неконтролируемый процесс горения, сопровождающийся уничтожением материальных ценностей и создающий опасность для...
-
Классификация систем синхронизации Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя и более...
-
При въезде автомобиля на тормозной стенд производится измерение массы оси, если имеется взвешивающее устройство; при его отсутствии масса оси может...
-
Общее диагностирование тормозных систем в АТО, организациях автосервиса (OA) или контроль при прохождении государственного технического осмотра включает:...
-
Классификация систем синхронизации Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя и более...
-
В состав лабораторной установки входят: - аналоговая вычислительная машина МН-10, на лицевой панели которой набрана электронная модель следящей системы;...
-
В соответствии с исходными данными варианта в качестве приемника применяется приемник когерентного приема ДЧМ. Рассмотрим выражение временной функции...
Общий принцип работы GPS - Использование принципов работы системы GPS и Wi-Fi микрочипов информационной системы WayNet в решении дорожных пробок