Основные принципы функционирования спутниковых навигационных систем ГЛОНАСС и GPS - Спутниковые навигационные приемники
В основе СНС заложен принцип измерения расстояний до спутников. Это значит, что для определения местоположения ВС на земной поверхности нужно измерить расстояние до каждого из группы спутников. Таким образом, спутники являются для нас точно известными опорными точками в пространстве. Это достигнуто тем, что орбиты спутников ГЛОНАСС и GPS рассчитаны с очень высокой степенью точности и поэтому в любой момент времени известны координаты каждого спутника. Измерение дальности до спутников происходит по аналогии с маяками для моряков, дальномерами ДМЕ - для летчиков, триангуляционными пунктами - для геодезистов. Если мы имеем точно известные координаты наземных радиодальномеров А и В, то отложив на карте две дальности Д1 и Д2 от этих известных точек, можно достаточно точно запеленговать место воздушного судна.
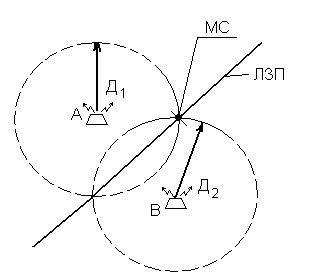
Рис. 8
Принцип основан на том, что радиопередатчик спутников ГЛОНАСС и GPS непрерывно излучает сигналы в направлении Земли. Эти сигналы принимаются GPS/ГЛОНАСС - приемником, находящимся в некоторой точке земной поверхности, координаты которой нужно определить.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников.
При приеме навигационных радиосигналов ГЛОНАСС и GPS, приемник, используя известные радиотехнические методы, измеряет время распространения сигнала от ИСЗ и вычисляет дальность "спутник-приемник". Для вычисления этого расстояния пользуются тем свойством, что радиосигнал распространяется со скоростью света. Так для определения местоположения точки нужно знать координаты (имеются в виду плоские координаты X, Y и высоту Н), то в приемнике вычисляются расстояния до трех различных ИСЗ.
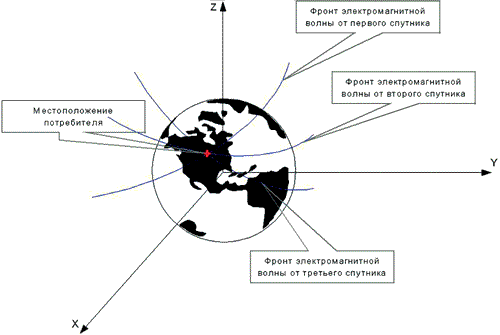
Рис. 9
Одновременно с проведением измерений расстояний в приемнике GPS/ГЛОНАСС выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными для решения навигационной задачи по определению координат и параметров движения.
Очевидно, что при данном методе радионавигации (он называется беззапросным) точное определение времени распространения сигнала возможно лишь при наличии синхронизации временных шкал спутника и приемника. Поэтому в состав аппаратуры ИСЗ и приемника входят эталонные "атомные" часы (стандарты частоты), причем точность спутникового эталона времени исключительно высока (10-13). Бортовые часы всех ИСЗ синхронизированы и привязаны к так называемому "системному времени". Эталон времени GPS/ГЛОНАСС - приемника менее точен, чтобы чрезмерно не повышать его стоимость. На практике в измерениях времени всегда присутствует ошибка, обусловленная несовпадением шкал времени ИСЗ и приемника. По этой причине в приемнике вычисляется искаженное значение дальности до спутника или "псевдодальность", а измерения расстояний до всех ИСЗ, с которыми в данный момент работает приемник, происходит одновременно. Следовательно, для всех измерений величину времени несоответствия можно считать постоянной.
С математической точки зрения это эквивалентно тому, что неизвестными являются не только координаты X, Y и Н, но и поправки часов приемника. Для их определения необходимо выполнить измерения псевдодальностей не до трех спутников, а до четырех. В результате обработки этих измерений в приемнике вычисляются координаты (X, Y, H) и точное время
Если приемник установлен на движущемся объекте и наряду с псевдодальностями измеряет доплеровские сдвиги частот радиосигналов, то может быть вычислена и скорость объекта относительно земной поверхности (путевая скорость). Таким образом, для выполнения необходимых расчетов точки необходимо обеспечить постоянную видимость с нее, как минимум четырех спутников.
Современные GPS/ГЛОНАСС приемники имеют от 5 до 12 каналов приема сигналов от спутников. Прием сигнала более чем от четырех спутников естественно позволяет повысить точность определения координат и обеспечить решения навигационных задач.
Для полного понимания, как функционируют спутниковые навигационные системы GPS и ГЛОНАСС, рассмотрим геометрическую интерпретацию на плоскости этот принцип. Этот принцип может быть объяснен следующим образом:
Предположим, что нам не известно наше местоположение, но мы хотим установить его и известно расстояние от одного спутника, то мы можем описать сферу заданного радиуса вокруг его.
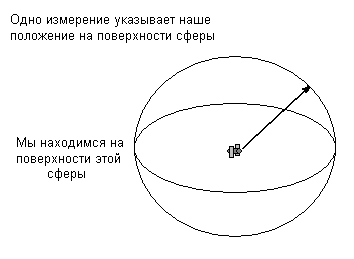
Рис. 10
Для примера, известная точная дальность до спутника пусть будет 20000 км, то в пространстве существует геометрическое место точек, а именно шар, т. е. поверхность, на которой мы можем находиться в данный момент от спутника.
Очевидно, что одно измерение ставит нас на одну из множества точек где-то на поверхности воображаемой сферы радиусом в 20000 км, в центре которой находится спутник.
Если в тот же момент времени мы знаем, что расстояние до второго спутника равно 21000 км, то геометрическое место точек нашего возможного местоположения в мировом пространстве сужается, т. к. место точек, где мы можем находиться одновременно на удалении 20000 км от одного спутника и 21000 км от другого, является окружность, образованная пересечением двух сфер с заданными радиусами.
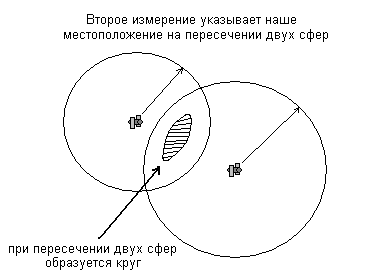
Рис. 11
То есть, принимая одновременно сигнал от двух спутников, мы можем утверждать что находимся где-то на линии окружности, образованной в результате пересечения двух сфер. Но двух спутников недостаточно для точного определения своего местоположения, т. к. область окружности определенной от этих спутников может достигать сотни, а то и тысячи километров.
Для того чтобы вычислить точно координаты определяемой точки, нам необходимо знать расстояние до третьего спутника - 22000 км.
В результате пересечения третьей сферы от спутника радиусом 22000 км с образованной теперь окружностью от двух спутников мы получаем позицию с двумя возможными точками А и В, где мы могли бы находиться в мировом пространстве.
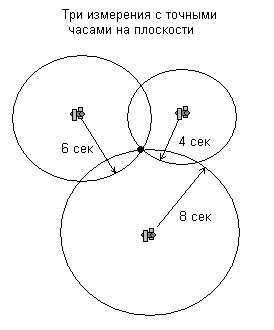
Рис. 12
Для того, чтобы определить свое точное местонахождение алгоритм нашего приемника методом логического исключения определяет, какая из двух точек А и В является истинной позицией приемника, т. е. исключает одну невозможную точку. Эта невероятная точка определяется в первую очередь высотой земной точки над поверхностью земного шара. Она будет находиться либо далеко в космическом пространстве, либо глубоко над Землей. Истинная же точка будет находиться в околоземном пространстве или на поверхности Земли, что и делает ее определяющей точное местоположение приемника.
Другим фактором, который выявляет ложную точку, является скорость перемещения точки. В истинной точке скорость всегда будет приблизительно одинаковой в достаточно короткие промежутки времени обработки приемником информации со спутников, в другой же точке - ложной, скорость будет иметь слишком большую скорость перемещения относительно земной поверхности.
И по двум признакам - высота и скорость компьютер нашего приемника, который имеет специальную программу, исключит ложную точку.
Вычисления местоположения потребителя от трех спутников произойдет в двухмерном пространстве (т. е. ц и л) и только в идеальных условиях, но из-за
Ошибки в измерении времени может возникнуть ошибка в определении четвертого спутника.
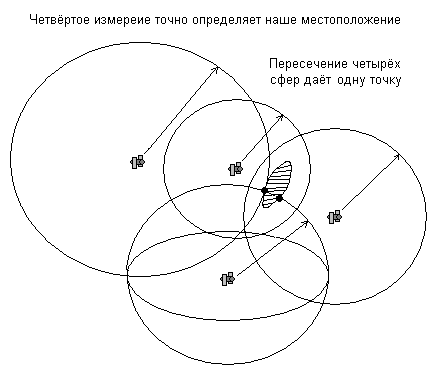
Рис. 13
Сфера от четвертого спутника пройдет через истинную точку, исключит ошибки в измерении времени и определит высоту над геоидом.
Таким образом, для получения точной информации для наземных и воздушных измерений необходимы данные от четырех спутников.
Следует отметить, что в памяти приемников GPS/ГЛОНАСС находится не просто примитивная модель сферической поверхности Земли, а достаточно точная модель геоида по небольшим региональным участкам. Что позволяет снизить ошибки вычислений до минимума и указать высоту полета над поверхностью эференц-эллипсоида, т. е. указывать приблизительную абсолютную высоту.
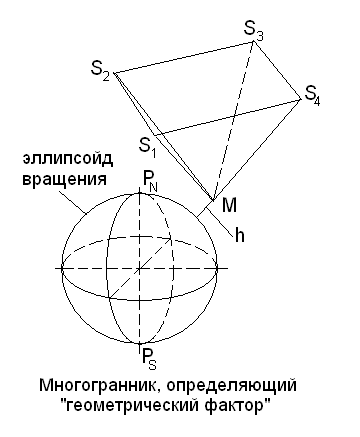
Рис.14
Похожие статьи
-
Спутниковая дальнометрия и точная временная привязка - Спутниковые навигационные приемники
Расстояние до спутника определяется по измеренному времени прохождения радиосигнала от спутника до приемника, умноженного на скорость света (300000...
-
Приемник GPS/"ГЛОНАСС" - Спутниковые навигационные приемники
Надо отметить, что приемники GPS и "ГЛОНАСС" существенно различаются по технической реализации. Первые используют более широкую полосу частот, чем...
-
В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), равномерно "покрывающих" всю земную поверхность). Орбиты ИСЗ вычисляются...
-
Наземный комплекс управления системы ГЛОНАСС - Спутниковые навигационные приемники
Управление орбитальной группировкой ГЛОНАСС осуществляет наземный комплекс управления (НКУ). Он включает в себя Центр управления системой (ЦУС) (г....
-
Организационная структура СНС "ГЛОНАСС" и GPS - Спутниковые навигационные приемники
Организация работы обеих систем в целом является схожей. ГЛОНАСС и GPS состоят из трех основных частей (в профессиональной литературе эти части...
-
Не будет преувеличением сказать, что толчок к развитию навигации с использованием космических аппаратов дал запуск в СССР первого искусственного спутника...
-
Применение СPS - Спутниковые навигационные приемники
Навигационная система APOLLO 2001 GPS Аппаратура APOLLO 2001 GPS является аппаратурой спутниковой навигации и предназначена для определения...
-
Принципы построения и основные особенности ВОСП на ГТС Особенностью соединительных линий (С. Л) является относительно небольшая их длина за счет...
-
Задачи определения местонахождения автомашин, других транспортных средств, ценных грузов и т. д. крайне актуальны как для государственных органов, так и...
-
Из всего вышеизложенного следует что, практически все применяемые в настоящее время меры упорядочения движения исходят из молчаливого признания...
-
В терминах электроники измерительный преобразователь определяется обычно как прибор, преобразующий неэлектрическую физическую величину (называемую...
-
Типы детекторов излучения, Фотонные приемники - Оптико-электронные (квантовые) системы и устройства
Известны многие физические явления, которые могут использоваться для обнаружения падающего на приемник излучения. Эти явления делятся на два класса: А -...
-
Разделить обслуживаемую территорию на макро-зоны можно двумя способами: статистическим, основанным на измерении статистических параметров распространения...
-
Интерес к проблемам развития логистики в промышленно развитых странах исторически был связан, прежде всего, с причинами экономического характера. В...
-
Кроме вышеперечисленных искажений в аналоговой ВОСПИ возможно возникновение искажений сигнала в ФПУ при использовании в качестве фотодиодов лавинных...
-
Классификация систем синхронизации Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя и более...
-
Уникальность сенсорной сети WayNet - объединение в одном чипе возможностей: ???наземной и подземной навигации с высокой точностью (до ± 0,5...
-
Итак, пробок можно избежать, а пропускную способность магистрали можно увеличить многократно за счет изменения пространственного расположения полос...
-
H2 = , Отсюда получим h = 1.79 Рассчитаем вероятность неправильного принятия решения в рассматриваемом приемнике (ДЧМ, КГ). Воспользуемся формулой...
-
В соответствии с исходными данными варианта в качестве приемника применяется приемник когерентного приема ДЧМ. Рассмотрим выражение временной функции...
-
При въезде автомобиля на тормозной стенд производится измерение массы оси, если имеется взвешивающее устройство; при его отсутствии масса оси может...
-
Прогноз великого классика подтвердила Эльвира Набиуллина, министр экономического развития и торговли РФ, заявив, что, если не изменить подход к...
-
Классификация систем синхронизации Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя и более...
-
Простейший вид излучения - монохроматическое, т. е. излучение характеризуемое очень узким интервалом длин волн. 1- (1 при 0. Монохроматическое излучение...
-
Принцип спектрального уплотнения (WDM) Потенциальные ресурсы волокна. До настоящего времени на многих коммерческих линиях использовалась скорость...
-
Класс, моделирующий канал, получает значения пропускной способности и задержки передачи при инициализации. Структура данных класса реализуется...
-
Концепция требуемых навигационных характеристик (RNP) является подходом к установлению требований к точности и надежности аэронавигации в том или ином...
-
Общие принципы Управление потоками в коммуникационных сетях обозначает регулировку скорости отправки данных в сеть с целью достижения максимального...
-
Основные положения теории ЧС - Корпоративная система связи с использованием сетевой телефонии
Техносфера, которая создана человеком для защиты от внешних опасностей по мере эволюции производства, сама становится источником опасности. Необходимо...
-
Выше отмечалось, что ОФ разделяется на полосовые и отрезающие. Полосовые фильтры характеризуют 0(Max), ТMax, полушириной на уровне 0,5 ТMax, ТMin в...
-
Это принцип предусматривает структурирование проблемы (системное представление) в виде иерархии. В наиболее простом виде иерархия строится из вершины...
-
Принципы администрирования, или управления, СКС полностью определяется ее структурой. Различают одноточечное и многоточечное администрирование. Под...
-
Для расчета основных элементов системы импульсно-фазового управления (СИФУ) преобразователя вначале требуется выбрать тип цифровых и аналоговых...
-
Принципы построения ВОСПИ Оптические волокна производятся разными способами, они обеспечивают передачу оптического излучения на разных длинах волн, имеют...
-
Системы вытяжки отработавших газов Оборудование деталь лакокрасочный инструмент Отработавшие газы удаляются с рабочих постов АРП с помощью...
-
Техническое обслуживание и ремонт подвижного состава, систем электроснабжения и путевого хозяйства На электротранспортных предприятиях Украины...
-
Размеры входа рабочего колеса определяются из условия обеспечения требуемых кавитационных качеств колеса и минимальных гидропотерь. Скорость на входе в...
-
Найдем значение соотношения сигнал/шум на выходе согласованного фильтра: Подставим в формулу вычисления вероятности ошибки полученное значение:...
-
Коммуникация - Процесс, с помощью которого осуществляются и развиваются все многообразные человеческие взаимоотношения; символы и знаки, а также средства...
-
Для повышения помехоустойчивости приема дискретных двоичных сообщений, решение о переданном символе принимается не по одному отсчету на длительности...
Основные принципы функционирования спутниковых навигационных систем ГЛОНАСС и GPS - Спутниковые навигационные приемники