Параметры и режимы работы комбинированного рабочего органа почвообрабатывающего приспособления к плугу
Введение и анализ источников
Фрезерные машины по агротехническим показателям выполнения некоторых операций имеют ряд явных и неоспоримых преимуществ перед другими почвообрабатывающими орудиями. Совмещение агрегатов с пассивными и активными рабочими органами позволяет уменьшить число проходов агрегатов по полю, а следовательно, снизив вредное воздействие движителей агрегатов на почву, повысить плодородие почвы и урожайность сельскохозяйственных культур [1]. Именно поэтому к фрезам постоянно проявляют повышенный интерес специалисты, занятые разработкой и эксплуатацией этих машин [2].
Исследования, проведенные в последние годы в Беларуси, показали, что применение фрезерных орудий позволяет [3-5]:
- - снижать плотность почвы до 1,15-1,3 г/см3 (исходная 1,45-1,5 г/см3); - повысить воздухоемкость почвы с 8-10 до 20-35%; - улучшить фильтрацию воды, что улучшает в 3-4 раза вынос солей из обработанного слоя на засоленных почвах; - эффективно бороться с сорняками и пожнивными остатками на поверхности поля; - более качественно заделывать органические удобрения.
Теоретическому и экспериментальному исследованию процесса резания фрезой и определению кинематических параметров рабочих органов фрез посвящены работы Ю. И. Матяшина, И. М. Гринчука, Г. М. Егорова, Г. Н. Дьяченко, И. М. Панова, Е. П. Яцука, М. З. Циммермана, П. М. Гильштейна, Г. Н. Синеокова, Ф. М. Канарева и других ученых.
Основная часть
Рыхлящий палец ударный скольжение
Рабочие органы на барабане установлены радиально, а потому интенсивность ударов пальцем изменяется в радиальном направлении прямо пропорционально расстоянию точек зуба от центра вращения барабана. Следовательно, сила удара по длине пальца различна и изнашивание его неравномерно.
Для обеспечения равномерного изнашивания, самоочистки и снижения энергоемкости профиль рабочего органа должен удовлетворять требованию постоянства ударного воздействия во всех его точках. Так как рабочий орган входит в почву под некоторым углом бI (рис. 1), то для выполнения указанного требования необходимо, чтобы всегда выполнялось следующее условие [6]:
VУ = v - cos бI, (1)
Где vУ - заданная или допустимая скорость ударного воздействия рабочего органа на почву; v - абсолютная скорость любой точки рабочего органа; бI - угол между любой точкой рабочего органа и плоскостью резания.
Для решения поставленной задачи мы задаемся углом в, который легко можно определить исходя из конструктивных особенностей агрегата. Этот угол образуется между векторами абсолютной скорости движения (скорости агрегата) и относительной (вращательное движение). Зная поступательную скорость движения агрегата и частоту вращения вала фрезы, угол в можно определить в любой момент времени. Поэтому при дальнейших расчетах принимаем значение угла в как постоянную величину.
Точки рабочей поверхности пальца удалены от центра вращения барабана на различные расстояния, поэтому можно написать:
VУ = рс - n/30 - cos(б+в);
V = рс0 - n/30 - cosв.
Подставив значения vУ и v в уравнение (1) и преобразовав, получим:
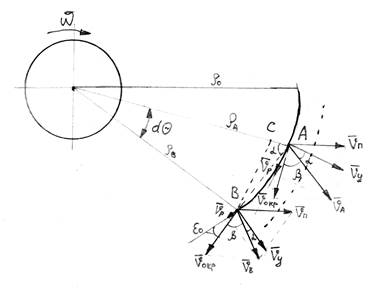
Рис. 1. Схема к выводу формулы для построения формы рабочего органа ротационной машины рыхлящего типа, обеспечивающего постоянство интенсивности ударного воздействия.

С = . (2)
Согласно схемам на рис. 1. ВС = сdи, АС = dс, угол ВАС = б, ОС = ОВ== с, ВС/АС = tg б или
Сdи / dс = tg б. (3)
После дифференцирования уравнения (2) имеем:

1=ctg(б+в)Чtgб+Ч ctg(б+в),
Откуда
Dс = [tg(б+в) - tgб]сdб. (4)
После подстановки значения dс из выражения (4) в уравнение (3) и некоторых преобразований, имеем
Dи = tgб[tg(б+в) - tgб]dб.
После интегрирования получим:

.
При и = 0 постоянная интегрирования:

.
В окончательном виде имеем:


И = -- ). (5)
Для построения профиля рабочего органа ротационного орудия, удовлетворяющего постоянству ударного воздействия во всех его точках, используют уравнение (5).
Для обеспечения в любой точке рыхлящей части пальца одинаковых условий рыхления без обволакивания ее сорняками и забивания рабочего органа необходимо сохранить постоянным угол ф скольжения (е0 стреловидности), который должен быть больше или равен углу трения ц [7], т. е.
Ф?ц,
Где ф=р/2-е0.
Поэтому линию изгиба размечаем таким образом, чтобы заданный угол е0 между касательной к этой линии в любой точке и перпендикуляром к радиусу - линии, соединяющей данную точку лезвия с осью вращения барабана, - везде был постоянным.
Из треугольника АВС (рис. 2) имеем:
ВС/АС=tg е0 (здесь е0?ц);
ВС=dс;
АС=сdи.
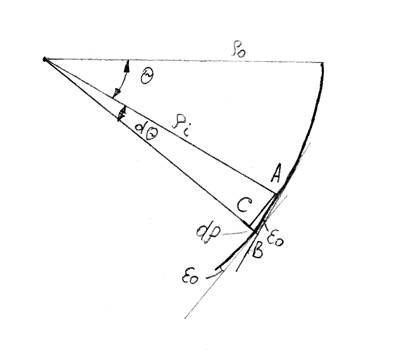
Рис. 2. Схема для вывода уравнения линии изгиба Г-образного пальца, обеспечивающей постоянство угла скольжения.
Следовательно, можно записать, что
Dс/сdи= tg е0.
Откуда:

. (6)
После интегрирования получаем:

. (7)
Рыхлящий палец ударный скольжение
Постоянная интегрирования С при подстановке значения и=00 будет равна:

.
Подставив полученное значение постоянной интегрирования С в уравнение (7), находим:

.
Решаем полученное уравнение относительно с для некоторой точки i:



. (8)
Подставив вместо и уравнение (5) имеем:

. (9)
Полученное выражение является уравнением в общем виде линии изгиба рыхлящей части пальца, при котором обеспечивается постоянство угла скольжения. Эта линия представляет собой логарифмическую спираль.
Заключение
Применение активного рабочего органа почвообрабатывающего орудия позволяет повысить качество предпосевной обработки почвы при работе на различных агрофонах за счет совмещения режущих и рыхлящих рабочих органов.
В результате проведенных теоретических исследований были получены зависимости для построения формы рабочего органа ротационной машины рыхлящего типа, обеспечивающего постоянство интенсивности ударного воздействия, и для построения линии изгиба рыхлящей части пальца, при котором обеспечивается постоянство угла скольжения.
Решения полученных зависимостей позволит получить данные для изготовления рабочих Г-образных органов рыхлящего типа, примененных в рабочем органе почвообрабатывающего орудия (рис. 3) [8].
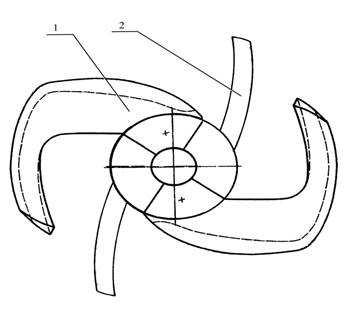
Рис. 3. Комбинированный рабочий орган:
- 1 - рабочий орган режущего типа (Г-образный нож); 2 - рабочий орган рыхлящего типа (Г-образный палец).
Литература
- 1. Добышев, А. С. Комбинированный агрегат на базе плуга / А. С. Добышев, К. Л. Пузевич // Вестник БГСХА. 2009. №2. С. 156-161. 2. Яцук, С. А. Ротационные почвообрабатывающие машины / С. А. Яцук [и др.]. М.: Машиностроение, 1971. 256 с. 3. Зубиков, Ф. Ф. Энергосбережение и экология при возделывании пропашных культур: материалы 7-й республ. науч. конф. студ., магист. и аспирантов посв. 165-летию академии, 19-21 апр. 2005 г. Горки, Респ. Беларусь / редкол. А. Р. Цыганов (отв. ред.) [и др.]. Горки: БГСХА, 2005. 238 с. 4. Добышев, А. С. Эффективность применения комбинированных агрегатов: монография / А. С. Добышев; БГСХА. Горки, 2003. 124 с. 5. Добышев, А. С. Совершенствование отвальной вспашки применением приспособления к плугу для дополнительной обработки почвы / А. С. Добышев, К. Л. Пузевич // Экологические аспекты механизации растениеводства: материалы ХIII Международного симпозиума, посвященного 60-летию со дня образования факультета механизации сельского хозяйства БГСХА. г. Горки. 2007. С. 66-68. 6. Циммерман, М. З. Рабочие органы почвообрабатывающих машин / М. З. Циммерман. М.: Машиностроение, 1978. С. 251-252. 7. Матяшин, Ю. И. Расчет и проектирование ротационных почвообрабатывающих машин / Ю. И. Матяшин, И. М. Гринчук, Г. М. Егоров. М.: Агропромиздат, 1988. С. 66-70. 8. Рабочий орган почвообрабатывающего орудия: пат. на полезную модель №4227 Респ. Бел./ А. С. Добышев, Ф. Ф. Зубиков, К. Л. Пузевич, А. Р. Цыганов, В. А. Шуринов, О. В. Рехлицкий, А. А. Дюжев; заявка № u 20070298; зарегистрирована 03.12.2007 г.; опубл. 23.04.2007 г.
Похожие статьи
-
Подготовка к работе плуга: А)Агротехнические требования: Все виды вспашки проводят ( кроме перепашки зяби, пара и заделки органических удобрений) должны...
-
А) МТЗ - 82 + КРН 4,2 Описание МТЗ-82. МТЗ-82 это колесный, универсальный трактор класса тяги 1,4 ,с четырьмя ведущими колесами. Предназначен для...
-
Цель анализа - изучить процесс резания стеблей режущими аппаратами с различными типами механизмов привода. Для этого необходимо: 1) Установить...
-
Лущение стерни повышает плодородие почвы. Во время лущения разрыхляется верхний слой почвы, подрезаются сорняки и заворачивается в почву их семена....
-
Для обоснования конструктивно-режимных параметров манипулятора, нами были выполнены теоретические исследования его рабочего процесса. Так как точка...
-
Норма выработки тракторного агрегата за смену может быть рассчитываем по данным производительности за час чистой работы. Для перехода к сменному времени...
-
Организация производства лесокультурных работ - Проект искусственного лесовосстановления
Научная организация труда на лесокультурных работах имеет целью повышение эффективности производства путем рационального использования имеющихся у...
-
При установке машин (орудий) на заданный режим работы или замене лемехов плуга, лап культиваторов, зубьев борон машин (орудий) ставить на специальные...
-
Основные правила техники безопасности при эксплуатации МТП Знание и строгое выполнение правил и инструкций по технике безопасности являются важнейшим...
-
Стерню озимых и яровых культур лущат дисковыми лущильниками на глубину 5...10 см и лемешными машинами на глубину до 18 см. При лущении стерни кукурузы и...
-
Состав основного цеха ЗАО "Абрау -- Дюрсо" Основным цехом завода шампанских вин "Абрау - Дюрсо" является цех шампанизации. Он подразделяется на три...
-
Режим и техника кормления молодняка рабочих лошадей - Кормление рабочих лошадей
Отсутствие научно обоснованных норм кормления молодняка рабочих лошадок приводит к тому, что в хозяйствах подкармливают юных лошадок так же, как и...
-
Актуальність теми. Під зерновими й зернобобовими в Україні зайнято 13.2 млн. га, або 46.5 % сільськогосподарських угідь. Врожай соломи становить більш 54...
-
На основании расчетов, произведенных в курсовом проекте, составляется сводная ведомость списочного количества рабочих для выполнения всех видов работ на...
-
1. Определяем рабочее тяговое усилие на выбранных передачах РNКр. р=РNКр. н-GТр*i Где РNКр. р- рабочее тяговое усилие на передачах РNКр. н- номинальная...
-
Механізація солома скирта щільність Результати теоретичних і експериментальних досліджень скиртоутворювача з клапаном комбінованої дії, а також вивчення...
-
1).Я выбираю челночный петлевой способ движения т. к. он Позволяет производить холостые движения агрегата с наименьшими потерями, например: повороты...
-
У Вступі обгрунтовано актуальність теми, вказано зв'язок з науковими програмами, сформульовано основні положення, які складають об'єкт, предмет, мету і...
-
Техника и режим кормления рабочих лошадей - Кормление рабочих лошадей
Соблюдению режима кормления рабочих лошадей отводится большое место в организации нормированного кормления и профилактики заболевании. Лучшим грубым...
-
Выбор скорости и рабочей передачи - Механизация малоценных молодняков коридорным способом
После того, как произведен для каждой операции выбор агрегатов (тяговой и рабочей машины), устанавливаются скоростные режимы работы агрегатов. При этом...
-
Организация работ и охрана труда - Комплексная механизация молочно-животноводческой фермы
Генеральный план молочной-животноводческой фермы выполнен в соответствии со СниП 11-97-76 "Генеральные планы сельскохозяйственных предприятий. Нормы...
-
Машинно-тракторный агрегат комплектуется с учетом следующих факторов: 1. Наиболее полной используемой мощности трактора. 2. Максимальной...
-
Режим орошения, Обработка почвы после полива - Черная смородина: посадка, выраивание, уход
Водный режим плодовых и ягодных растений в основном определяется характером строения их стеблевой и корневой системы, периодами их роста и плодоношения,...
-
Мотовило предназначено для подвода стеблей к режущему аппарату, удержания их в период среза и подачи к транспортирующим устройствам жатки. Качество...
-
В данном курсовом проекте для выполнения основных работ на лесосеке применяются укрупненные комплексные бригады (УКБ) и функциональные бригады (звенья)....
-
Перед началом работы необходимо проверить крепление отвалов, лемехов, фрез и других рабочих органов и исправность почвообрабатывающей машины. К работе...
-
Допущенные к работе тракторы, комбайны, другие мобильные и стационарные машины, механизмы и оборудование должны быть исправны, опробованы на холостом...
-
Барабанный подборщик с пружинными пальцами. Основными условиями качественной работы подборщика являются частота подбора валка, непрерывность поступления...
-
В динамическом отношении машинно-тракторный агрегат представляет собой систему твердых тел, связанных между собой жесткими и упругими связями. Агрегат...
-
Внесение удобрений, Посев и посадка - Лесная селекция
Перед работой на тракторных агрегатах для внесения органических, минеральных и жидких удобрений следует усвоить правила эксплуатации и безопасной работы...
-
Обоснование выбора, описание устройства и работ Рычажное приспособление Состоит из зацепа 2, в который ввернуты рукоятка 1 и винт 3 с резьбой М 10. Чтобы...
-
Комплексная выработка на одного рабочего в смену на основных работах ровна: , (10.1) Где - комплексная выработка на одного рабочего в смену на основных...
-
Мероприятия по охране труда и природы - Организация работы виноградников
Для обеспечения безопасности и охраны труда на предприятии предусмотрено следующее: На предприятии предусматривается расположение и расстановка...
-
IPO - Международный эквивалент Schutzhund - SchH (шутцхунд) с цифрой в качестве суффикса (1, 2, 3), который означает рабочую степень различной сложности....
-
Контроль и оценку качества работы по внесению минеральных удобрений проводят при настройке агрегатов, периодически в процессе выполнения работы, а также...
-
Технология выполнения работ - Механизация малоценных молодняков коридорным способом
Технология лесовосстановительных работ включает главным образом совокупность приемов и способов при лесовосстановлении на не покрытых лесом землях. Она...
-
Обоснование параметров регулирующей осушительной сети - Мелиорация участка переувлажненных земель
Регулирующая сеть служит для сбора и удаления с орошаемой территории избыточных поверхностных и грунтовых вод. С помощью регулирующей части системы...
-
С учетом имеющейся техники в хозяйстве и внедрением прогрессивных технологий предлагаю задействовать: Трактора: ДТ-75М, Т-150К, МТЗ-80; Автомобили:...
-
Організаційно-економічні та фармакоекономічні дослідження рівня фармацевтичного забезпечення препаратами для птахівництва Птахівництво в Україні є однією...
-
Значение и количество информации увеличивается с каждым днем и возникает необходимость ее обработки. В этом процессе на помощь человеку приходят...
Параметры и режимы работы комбинированного рабочего органа почвообрабатывающего приспособления к плугу