Фильтрация погрешностей, Выбор оптимальных параметров фильтра, Пределы корректирования - Способы коррекции измерительных схем. Принцип действия электромагнитных усилителей, их характеристики
Эффективным способом снижения действия помех, а, следовательно, и погрешностей в АЭП является фильтрация. Наиболее часто применяется линейная фильтрация. Особенно эффективно действие фильтрации, когда спектры полезного сигнала АЭП и помехи не перекрываются.
Выбор оптимальных параметров фильтра
Пусть в СИ действует смесь полезного сигнала и помехи со спектральными плотностями SC(щ) и SП(щ). Сигнал и помеха стационарны и некоррелированы.
Полезный сигнал менее широкополосен и его спектральная плотность снижается с ростом частоты. В этом случае существует некоторое оптимальное значение полосы пропускания частоты фильтра щ0 (ФНЧ), минимизирующее значение СКО погрешности от действия помех СИ. В качестве фильтра можно использовать один из преобразователей СИ.
Определим щ0. Для этого найдем СКО погрешности от искажения измерительного сигнала при прохождении его через фильтр (у[ДN]) и погрешности из-за прохождения части помехи через этот фильтр (у[ДС]).
(2.32)

(2.33)

Где K(jщ) - частотная характеристика ФНЧ и СИ;
Щ0 - оптимальное значение полосы пропускания фильтра.
Суммарную погрешность фильтрации определим из соотношения можно найти значение щ0 Минимизирующее суммарную погрешность фильтрации.
У2[ДУ]=у2[ДN]+у2[ДС] (2.34)
Решив уравнение вида:
?у2[ДУ]/?щ0=0 (2.35)
Если частотная характеристика СИ или фильтра нижних частот близка по виду к частотной характеристике идеального фильтра, то решение упрощается.
(2.36)

Где К0 - номинальный передаточный коэффициент СИ.
Оптимальная линейная фильтрация
Пусть фильтр имеет линейную фазочастотную характеристику
Ц(щ)=-щt0 (2.37)
Тогда спектральная плотность помехи, прошедшей через искомый фильтр равна
SП(щ)В=SП(щ)|К(jщ)|2 (2.38)
Где К(jщ) - комплексная частотная характеристика искомого фильтра.
Измерительный сигнал подвергается линейному преобразованию L, а сигнал погрешности после преобразований имеет вид:
Е(t)=L[y(t)-y(t-t0)] (2.39)
Преобразование Фурье этого сигнала
(2.40)

А энергетический спектр погрешности
(2.41)

Найдем минимальное значение SЕ(щ) из выражения
?SЕ(щ)/ ?K(щ)=0=2K(щ)-SП(щ)-2[1-K(щ)]-SC(щ) (2.42)
Откуда
КОпт(щ)=SC(щ)/SC(щ)+SП(щ) (2.43)
Реальный фильтр имеет характеристику вида:
КОпт(jщ)=[SC(щ)/(SC(щ)+SП(щ))]-e-jщt. (2.44)
Подставив (2.42) в (2.40) получим
Min (2.45)

Формула 2.44 служит для определения минимального значения погрешности фильтрации.
Уменьшение динамической погрешности
Последовательное включение корректирующих устройств

Рисунок 6. Структурная схема средства измерения с последовательной корректирующей цепью
КУ(S)=К1(S)K2(S) (2.46)
Где К1(S), K2(S) - передаточные характеристики корректируемого СИ и корректирующего преобразователя;
КУ(S) - результирующая передаточная характеристика.
Если
K2(S)=КНом(S)/K1(S) (2.47)
То
КУ(S)=КНом (2.48)
И средство измерения не будет иметь динамической погрешности.
При этом необходимо чтобы скорректированное СИ было бы физически осуществимо и устойчиво.
Корректирование с помощью цепи обратной связи
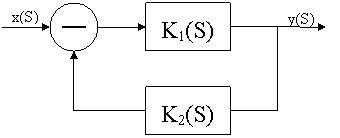
Рисунок 7. Структурная схема средства измерения с коррекцией цепью отрицательной обратной связи
Выходной сигнал равен
У (S)=х(S)K1(S)/1+K1(S)K2(S) (2.49)
Для рабочего диапазона частот (щ1Чщ2)
У(S)=х (S)/K2(S) (2.50)
Если
Щ1?щ?щ2
K2(S)=1/KНом=const
То
У(t)=KНом-х (t) (2.51)
Где КНом - статический номинальный коэффициент преобразования СИ.
Корректирование с помощью аналоговых и цифровых вычислительных устройств
Если в СИ нет средств вычислительной техники, то корректирование нельзя осуществить программным способом без дополнительных аппаратных затрат и целесообразно строить корректирующие цепи на базе операционных усилителей. Для цифровых вычислительных устройств вначале производят аналогово-цифровое преобразование выходного сигнала АЭП, а затем уже программную корректировку.
Пределы корректирования
В АЭП присутствуют помехи, действие которых возрастает с расширением полосы пропускания АЭП. Поэтому при улучшении динамических свойств АЭП происходит увеличение погрешности прибора. Выбрать дополнительный параметр коррекции необходимо путем отыскания минимума общей динамической погрешности СИ.
(2.52)

Где и - дисперсия динамической погрешности и погрешности от действия помех.
Конструктивные способы улучшения точности работы АЭП
К конструктивным способам относятся: заземление, экранирование, изоляция, разнесение и ориентация, а также выбор полного входного импеданса.
Структурные схемы заземления представлены на рисунке 8.


Рисунок 8. Схемы заземления
Условные обозначения:
А - заземление в одной точке (последовательное);
Б - заземление в одной точке (параллельное);
В - заземление в нескольких точках.
Для снижения шумов на низких частотах применяют систему заземления в одной точке, а на высоких в нескольких точках.
Принцип действия электромагнитных усилителей, их характеристики.
Похожие статьи
-
Использование этого способа в ряде случаев позволяет свести точность измерения с помощью АЭП к точности использования образцовой меры. Способ требует...
-
В СИ с мультипликативной коррекцией погрешностей осуществляется выделение погрешностей СИ и управление ею коэффициентом преобразования СИ для минимизации...
-
При данном способе коррекции уменьшение погрешностей осуществляется за счет смещения функции преобразования СИ (рисунок 3). Рисунок 3. Структурная схема...
-
Коррекция погрешностей производится одним из следующих способов: -калибровка; -аддитивная коррекция; -мультипликативная коррекция; -автоматическая...
-
Наиболее важным заданием усовершенствования средств измерения (СИ) является уменьшение всех составляющих его погрешностей, т. е. повышение точности...
-
Любой датчик или первичный измерительный преобразователь (ПИП) и последующие преобразователи измерительного канала (ИК) работают в сложных условиях,...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
Выбор схемы базирования и описание работы приспособления Анализируя техническое задание, эскиз детали под выполняемую операцию из ГОСТ 21495-76 выбираем...
-
Измерение скорости вращения вала основано на подсчете количества импульсов пришедших с датчика за определенный промежуток времени. В нашем случае за 1...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Классификация средств измерения температуры Классификация приборов для измерения температуры по принципу действия изображена на рисунке 3.3. Рисунок 3.3...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Определение частоты вращения ведомой звездочки мин-1. 3.3.2. Наибольшая рекомендуемая частота вращения малой звездочки для выбранной цепи мин-1 (таблица...
-
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют...
-
Расчет параметров электрической схемы замещения - Электрическая часть электростанций и подстанций
В соответствии с расчетной схемой электроустановки составляется эквивалентная электрическая схема замещения прямой последовательности. Схемой замещения...
-
Для нахождения значений коэффициента определим вначале величины частной производной. С этой целью перестроим винтовые характеристики (рис. 2) в...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
ОХРАННО-ПОЖАРНАЯ СИГНАЛИЗАЦИЯ КАК КАНАЛ УТЕЧКИ ИНФОРМАЦИИ И СПОСОБ ЕГО ЗАКРЫТИЯ - Защита информации
Для анализа возможных каналов утечки информации из режимных помещений необходимо оценить все известные каналы утечки информации, применительно к системе...
-
Схема размещения технологического оборудования - это расположение технологического оборудования и рабочих мест на производственной площади. В курсовом...
-
Характеристика пассивных радиоэлементов. Резисторы В схеме блока управления используются постоянные резисторы С5-16МВ (R15 - датчик тока на пороговом...
-
Расчет номинальной винтовой характеристики Среднее эффективное давление на номинальном режиме, pЕН: Эффективная мощность на номинальном режиме, NEН: NEН...
-
Назначение, область применения и место установки в производственном процессе Шнековый питатель ПШМ - 1 входит в состав аэрозоль транспортера и...
-
Для выбора электрических аппаратов производим расчет тока в отдельных цепях схемы. В данной схеме формовочной машины ток, протекающий в силовой цепи,...
-
Грузооборот холодильник строительный оборудование Схема технологического процесса, температурный режим Рисунок 1.1 Схема технологического процесса...
-
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором...
-
Для измерения температуры растворов выбираем термометры сопротивления Pt100 двух типов, отличающихся глубиной монтажной части. На трубопроводах с...
-
Обоснование выбора влияющих факторов. Основными параметрами, влияющими на формирование пряжи пневмомеханическим способом, являются крутка и частота...
-
Основной частью роторного измельчителя (см. рис.2.4) являются два массивных, горизонтально расположенных ротора (2) установленными в сварном коробе (1)....
-
Выбор оптимального режима резания - Режимы резания
Качество и эффективность изготовления деталей машин зависят от рационального проведения процессов обработки заготовок резанием, которое достигается в...
-
Пост ручной дуговой сварки (РДС) Стационарный сварочный пост комплектуется: 1. Система вентиляции, 2. освещение, 3. заземление, 4. источник питания...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Первый вариант схемы. На низкой стороне: 1 Турбогенератор ТВВ-500-2ЕУ3. На высокой стороне: 1 Турбогенератор ТВВ-500-2ЕУ3 и 2 Турбогенератора...
-
ВЫБОР ОПТИМАЛЬНОГО ВАРИАНТА КОРОБКИ СКОРОСТЕЙ Выбор оптимального варианта коробки скоростей очень сложен. Здесь большое значение имеют группы и типы...
-
На рисунке 2.7 представлена принципиальная схема системы электропривода, а также на рисунке 2.8 его структурная схема. Рисунок 2.7- Принципиальная схема...
-
Переходную характеристику по задающему воздействию строят на основании ее передаточной функции Данная характеристика представлена на рисунке 1.12...
-
Наибольшие пусковые ток и момент определяются из условий: I Пуск =(1,5ч2)-I Н =2- I Н =2-37=74 А; М Пуск =с- I Пуск =2,17-74=160,44 Н-м. Ток и момент...
-
В приспособлениях силы трения возникают на поверхностях контакта заготовки с опорными и зажимными элементами. Величина коэффициента трения (зависит от...
-
И их сравнительный анализ Для реализации данного устройство можно предложить два варианта cтрутурной схемы изображенные на рисунках 1.2 и 1.3 Рисунок...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Для построения винтовых характеристик воспользуемся формулой: (1) Где - мощность, срабатываемая винтом; - скорость вращения винта; - постоянный...
Фильтрация погрешностей, Выбор оптимальных параметров фильтра, Пределы корректирования - Способы коррекции измерительных схем. Принцип действия электромагнитных усилителей, их характеристики