Выбор и описание контура регулирования - Автоматизация теплицы
Схема используемого цифрового ПИД - регулятора представлена в соответствующем документе (структурная схема - на рисунке 10.1). На его вход подаются два сигнала: задающий, и сигнал обратной связи, приведенные к условному максимуму в 5 В. Для выделения ошибки, сигнал ОС предварительно инвертируется, после чего уже идет на сумматор. Ошибка проходит на три параллельно соединенных усилителя, отвечающих за отработку пропорционального, интегрального и дифференциального коэффициентов усиления.
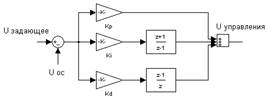
Рисунок 10.1 - Структурная схема цифрового ПИД - регулятора
Для реализации схем задержек типа и используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).


В качестве звена задержки используется интегральная микросхема, позволяющая задерживать аналоговый сигнал, дискретный, представляемый в последовательном или параллельном виде. Микросхема также позволяет программно менять время задержки.
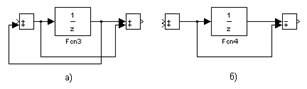
Рисунок 10.2 - Способы реализации передаточных функций звеньев задержки
Как видно, вся принципиальная схема строится на операционных усилителях (используются для реализации усилителей, сумматоров и инверторов), интегральных микросхемах задержки и резисторах.
На принципиальной электрической схеме также изображена схема дистанционного управления электроприводом регулирующего устройства (например, автоматического клапана, для отключения насосов от водопроводной сети).
Схема обеспечивает движение регулирующих устройств только во время подачи командных сигналов. Ограничение хода регулирующих устройств в конечных положениях обеспечивается соответствующими конечными выключателями.
Для предотвращения одновременного включения обеих катушек реверсивного магнитного пускателя, помимо механической блокировки, которой снабжен пускатель, в схеме предусмотрена электрическая блокировка с помощью размыкающих блок - контакторов ПМЗ и ПМО.
Электропривод снабжен потенциометрическим датчиком ПД, движок которого механически связан с редуктором привода. Датчик ПЛ подключается к устанавливаемому на щите управления блоку указателя положения БУП, состоящему из трансформатора питания, выпрямителей, подгоночного резистора и стрелочного прибора УП, шкала которого имеет градуировку 0 - 100%, пропорционально напряжению, снимаемому с потенциометрического датчика. Контакторы используются для отключения цепей управления при воздействии на привод ручным способом с помощью маховика.
Похожие статьи
-
Поскольку вывод передаточной функции трехфазного двигателя достаточно громоздкий, предположим, что в погружных насосах скважин используются двигатели...
-
Практически все тепличные хозяйства строятся по единой схеме: теплоизолированное помещение, в котором к нужным значениям с помощью системы обогрева,...
-
Выбор и обоснование отдельных узлов и элементов, Датчик влажности воздуха - Автоматизация теплицы
Датчик влажности воздуха По требуемой точности измерения, которая определяется точностью поддержания влажности и коэффициентом : И заданному диапазону...
-
Все основные и вспомогательные параметры, используемые при управлении АСУ ККТХ, сведены в таблице. В таблице указаны верхние и нижние границы их...
-
Оснащение тепличного хозяйства Для обеспечения выполнения требований технического задания, предлагается обеспечить надежное централизованное управление...
-
Архитектура разрабатываемой системы имеет два уровня: нижний - подсистема управления (датчики, микроконтроллер, исполнительные механизмы и оборудование)...
-
Описание видов обеспечения, Математическое обеспечение - Автоматизация теплицы
Исходя из технического задания можно выделить следующие основные виды обеспечения разрабатываемой АСУ: - математическое; - информационное; - обеспечение...
-
Наименование параметра Величина Диапазоны измерения давления, бар 0-25 Выходной сигнал, мА 4-20 Схема включения Двухпроводная Питание, В 10-32...
-
Выбор средств реализации информационной системы Названные в параграфе 1.4. настоящей работы задачи могут быть решены тремя типами средств автоматизации:...
-
Выбранные датчики, исполнительные механизмы и их месторасположение, а также структурная схема АСУ ТП производства сухого молока позволяют составить схему...
-
Для реализации устройства управления потребуются: генератор слов, логические элементы (И, ИЛИ, НЕ), счетчики и логический анализатор. Ниже приведены...
-
По результатам обследования необходимо выбрать архитектуру системы. Для корпоративных систем рекомендуется архитектура клиент/сервер. Архитектура...
-
Оборудование тепличного хозяйства, Центральный пост оператора - Автоматизация теплицы
В электрощитовом зале насосной станции второго подъема будет установлен шкаф с оборудованием, отвечающим за управление частотными регуляторами, измерение...
-
Описание методологии и техник выявления требований Сбор требований -- это итеративный процесс, который включает в себя взаимодействие с клиентами для...
-
Исполнительный механизм - Автоматизация теплицы
В качестве исполнительного механизма синтезируемой системы используется миниспринклер 4191 компании JHi I. S., который специально разработан для...
-
Прямоточная система применяется для хозяйственно-питьевого и противопожарного водоснабжения. В некоторых случаях применяется и для...
-
Описание бизнес-процессов бюджетирования в группе компаний нефтегазового сектора Одна из исследовательских задач данной работы состоит в том, чтобы...
-
Требования к системе - Автоматизация теплицы
Требования к структуре системы. Автоматизированная система управления и контроля климата в тепличных хозяйствах должна быть распределенной и выполнена на...
-
Датчик расхода воды на распыление - Автоматизация теплицы
Датчик ДРК-4 предназначен для измерения расхода и объема воды в трубопроводах и имеет следующие технические характеристики: 1) Измеряемая среда - вода с...
-
Отопление и вентиляция, Электротехнические устройства - Автоматизация теплицы
Отопление и вентиляцию теплиц и парников следует проектировать в соответствии с указаниями СНиП II-33-75 и с учетом норм настоящего раздела. Отопление и...
-
Общая характеристика объекта управления - Автоматизация теплицы
Краткие сведения об объекте автоматизации Проект управления и контроля климата в тепличных хозяйствах является типовым. В помещении площадью 80 на 60...
-
Заключение - Автоматизация теплицы
В данном курсовом проекте была синтезирована двухуровневая АСУТП, которая осуществляет дискретное регулирование влажности воздуха и контроль расхода воды...
-
Описание используемых методов и алгоритмов - Выбор оптимального маршрута для строительства дороги
В данном пункте нужно проанализировать используемый алгоритм поиска кратчайшего пути. Алгоритм Дейкстры Находит кратчайший путь от одной из вершин графа...
-
Разработка АРМ - Автоматизация теплицы
Требования к компьютеру связаны с большим объемом обрабатываемой информации и необходимостью представления информации графически. LAN связывает АРМ...
-
Введение - Автоматизация теплицы
С каждым годом в тепличных предприятиях все большее внимание уделяется качественному поддержанию микроклимата. Правильно выбранная технология поддержания...
-
Погружные датчики температуры устанавливаются непосредственно в трубопровод для измерения температуры воды (или другого теплоносителя) в системах...
-
В среде электронного ресурса ИИС "MD_SLAGMELT" (Рис. 6) для доступа к компоненту "моделирование" необходима учетная запись (пара логин/пароль) (Рис.7)....
-
Описание пакета Simulink - Среда визуального моделирования Simulink
С помощью Simulink возможно быстрое создание, моделирование и управление детализированной блок-диаграммой системы, использующей предопределенные блоки....
-
Описание Блок PIDFF подобный блока PID, но он еще дополнительный вход сигнала опережение. Пользователь может настроить блок PIDFF таким образом, что...
-
Информационная система Lumesse ETWeb является системой, которая автоматизирует весь комплекс процессов управления персоналом. Важно отметить, что данная...
-
Элементы и устройства автоматики
2 лекция. Типовые структуры и средства АСУ ТП. Локальные системы контроля, регулирования и управления. Автоматизированные системы управления...
-
Далее необходимо провести качественную характеристику ПО (табл. 4.1.) для покупки его в отдел продаж для работы Ревенью менеджера. Таблица 4.1 ....
-
Информационное обеспечение - Автоматизация теплицы
База данных АСУ ККТХ формируется путем заполнения стандартных форм на экране видеотерминала на основании перечня каналов контроля и регулирования. Вызов...
-
Изучение специфики предметной области по литературным данным и по результатам поиска в интернете Задачи автоматизации деятельности почтовых систем в...
-
Анализ затрат на оплату труда В выпускной квалификационной работе рассматривается процесс автоматизации деятельности компании за счет разработки...
-
Назначение АСУ ККТХ - Автоматизация теплицы
Назначение АСУ ККТХ АСУ ККТХ предназначена для выполнения комплекса информационных и управляющих функций, обеспечивающих: - задание суточного цикла...
-
Техническое задание, Общие сведения - Автоматизация теплицы
Общие сведения Настоящее техническое задание разработано согласно ГОСТ 34.602-89 "Информационная технология. Техническое задание на создание...
-
Консольный насос К 200-150-250/4-5 - Автоматизация теплицы
Консольный насос представляет собой, с точки зрения гидравлики, характерный тип центробежного насоса, рабочим органом которого является центробежное...
-
Общие положения, Водопровод - Автоматизация теплицы
Теплицы следует проектировать однопролетными или многопролетными. Тип теплиц для каждой зоны определяется технико-экономическим обоснованием. Парники...
-
Описание входной и выходной информации "Учет продаж футбольной атрибутики и спортивных товаров". Входная информация задачи: 1. Условно постоянная...
Выбор и описание контура регулирования - Автоматизация теплицы