Структуры алгоритмов бездатчикового управления - Бездатчиковое управление электроприводом
Как было сказано выше, алгоритм бездатчикового управления ВД разбивается на три подзадачи: определение начального положения ротора двигателя, разгон двигателя до момента устойчивой работы алгоритма бездатчикового управления и работа в режиме бездатчнкового управления. Алгоритм пуска привода должен принципиально отличаться от основного алгоритма бездатчикового управления, т. к. на момент пуска противо-ЭДС нельзя определить с необходимой точностью, поэтому привод в этом режиме будет иметь разомкнутую структуру. А в основе алгоритма определения начального положения ротора должны лежать совершенно другие принципы.
Одна из главных задач, возникающих при создании данного ЭП, - определение начального положения ротора. Перед пуском привода необходимо знать положение ротора с точностью до сектора (60 эл. град.), чтобы начать движение в нужную сторону. Ранее для этих целей широко использовался способ, при котором в начале пуска подастся напряжение на одну из фаз, выдерживается пауза, необходимая для окончания переходных процессов, а затем начинается движение с уже определенного положения ротора. Однако при использовании этого способа возможно перемещение ротора как в одну, так и в другую сторону, что является нежелательным для данного привода, поэтому, в данной работе будут разработаны и исследованы альтернативные алгоритмы определения начального положения ротора синхронной машины.
Все способы определения начального положения подразумевают задание некоторого тестового сигнала (тока или напряжения) и анализ отклика на него. Далее по некоторой методике находится непосредственно положение ротора. Поэтому структура привода для определения начального положения ротора будет иметь вид, показанный на рис. 2.
Еще одна из подзадач, которая возникает при создании алгоритма бездатчикового управления приводом, пуск и разгон двигателя до определенной скорости, на которой будет устойчиво и с заданной точностью определяться положение ротора.
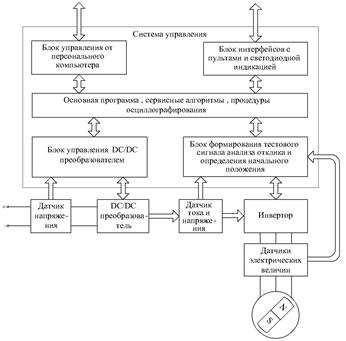
Рис. 2 Структурная схема привода для определения начального положения ротора двигателя
Существует несколько вариантов решения данной задачи, но все они подразумевают пуск привода в разомкнутой системе путем формирования определенной последовательности импульсов (аналогично пуску шагового двигателя). Различия заключаются лишь в том, как эта последовательность сформирована. Это может быть последовательность импульсов линейно нарастающей частоты или заранее заложенная в память более сложная кривая разгона.
САУ ЭП имеет переменную структуру, которая показана на рис. 1.3.2. При пуске привода система управления представляет собой разомкнутую структуру, в которой блок пуска привода коммутирует фазы по заданному закону,
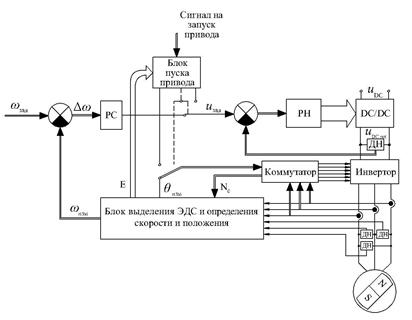
Рис. 3 Структурная схема ЭП при пуске и в режиме бездатчикового управления
Зависимость f=f(t) представляет собой последовательность импульсов, которая имеет переменную частоту, что позволяет осуществить более плавный разгон. Обычно такая зависимость подбирается в результате экспериментов таким образом, чтобы движение привода было похоже на то, которое было бы при пуске двигателя по датчику.
После того, как привод выведен на заданную скорость, включается блок определения положения, и система замыкается по положению и скорости.
Похожие статьи
-
Электропривод ротор бездатчиковый управление Одной из главных задач в современных системах управления СМ является корректный пуск системы. Для этого...
-
Выбор алгоритма бездатчикового управления - Бездатчиковое управление электроприводом
Существует множество, способов оценки положения ротора синхронной машины без помощи датчика положения ротора. Среди них можно выделить два подхода:...
-
Методы с разнесенным измерением - Бездатчиковое управление электроприводом
Метод тестовых импульсов - в одну или несколько неработающих фаз подаются импульсы с известным напряжением. При этом контролируется либо амплитуда...
-
Система управления преобразовательным устройством предназначена для формирования и генерирования управляющих импульсов определенной формы и длительности,...
-
Предлагаемый в данной работе новый протокол Adaptive Rate Transmission Control Protocol (ARTCP) заимствует некоторые механизмы от протокола TCP. В ARTCP...
-
Сущность и структура SCOR-модели цепи поставок SCOR-модель. Референтная модель цепи поставок - Supply Chain Operations Reference model (SCOR-модель), она...
-
Система, поддерживающая ARTCP, может быть также совместима с TCP. Для этого, инициатор соединения, поддерживающий ARTCP, помещает в заголовке...
-
Исполнительные устройства систем управления
1. Опишите конструкцию, принцип действия и свойства электромагнитных поляризованных исполнительных устройств. 2. Магнитные опоры: определение,...
-
Анализ работ в области транспортных протоколов и в частности механизма PP (см. часть 1.8 введения) позволил заключить, что недостатки протокола TCP...
-
Организационная структура управления ООО - Проект реконструкции сервисного центра ООО "Авторесурс"
Система организационной структуры предприятия - линейно-функциональная (см. приложение 8). Станция технического облуживания (СТО) осуществляет...
-
Общие принципы Управление потоками в коммуникационных сетях обозначает регулировку скорости отправки данных в сеть с целью достижения максимального...
-
Предмет исследования Одним из важнейших направлений научно-технического прогресса в настоящее время являются коммуникационные системы, представляющие...
-
АРМ - Понятие и структура. - Понятие экспертных систем (ЭС)
Современные масштабы и темпы внедрения средств автоматизации управления в народном хозяйстве с особой остротой ставит задачу проведения комплексных...
-
Введение - Проектирование рулевого управления VOLVO FMX
Рулевое управление - это совокупность устройств, обеспечивающих поворот управляемых колес автомобиля при воздействии водителя на рулевое колесо. Рулевое...
-
Заключение, Список использованных источников - Проектирование рулевого управления VOLVO FMX
При разработке рулевого управления для грузового VOLVO-FMX(6x6) был спроектирован рулевой механизм с сектором и винт-шариковой-гайкой-рейкой с...
-
В результате анализа различных вариантов построения цифровых сотовых систем подвижной связи (ССПС) в стандарте GSM принят многостанционный доступ с...
-
Данный механизм разработан в докторской диссертации В. К. Тумей [22] и в него входит не только спецификация транспортного протокола, но и целая система...
-
Целесообразность введения автоматики В ходе проектирования любой автоматизированной системы разработчик должен решить важный вопрос: какая степень...
-
Рулевая колонка, Рулевой механизм - Технология ремонта рулевого управления
Рулевая колонка предназначена для соединения рулевого механизма с рулевым колесом. Основой рулевой колонки есть рулевой вал, в котором конструктивно...
-
Программно ШИМ реализован с использованием таймера/счетчика микроконтроллера. После включения питания и окончания процедуры сброса, контроллер переходит...
-
Структура оперативного руководства станции - Технология и управление работой станции
Маневровый диспетчер обеспечивает : - обеспечивает руководство оперативной работой станции; - отвечает за правильное и своевременное формирование...
-
Структура управления станцией Пассажирская станция Адлер 1 класса является линейным предприятием Краснодарского отделения Северо-Кавказской железной...
-
Устройство числового программного управления 2Р22, именуемое в дальнейшем "устройство", предназначено для управления металлообрабатывающими станками. По...
-
Его принцип действия основан на работе электромотора, поэтому и устройство намного проще. Электроусилитель руля приводится в действие не от силового...
-
Схема технологического процесса на зоне представлена на рисунке 2. Основные маршруты Возможные маршруты Маршруты выборочного диагностирования Рисунок 2 -...
-
Для проведения измерений при разных значениях числа потоков были произведены эксперименты на 10-ти вариантах сетевой топологии, содержащих от 2 до 20...
-
Механизмы управления - Транспортные средства
К механизмам управления относятся рулевое управление и тормозная система. Рулевое управление Направление движения всех современных автомобилей изменяется...
-
Сеть всегда объединяет несколько абонентов, каждый из которых имеет право передавать свои пакеты. Но, как уже отмечалось, по одному кабелю одновременно...
-
Электроусилитель рулевого управления - Технология ремонта рулевого управления
Основными элементами системы являются бесщеточный электромотор, механическая передача (сервопривод), датчики угла поворота руля и крутящего момента и...
-
Управление системой кондиционирования - Оборудование самолета Ту-154
Для управления отбором воздуха, поступающего в систему кондиционирования, на панели системы кондиционирования имеются три перекидных переключателя 34,...
-
Структура структурированной кабельной системы В основу любой структурированной кабельной системы положена древовидная топология, которую иногда называют...
-
Когда в 1897 г. Рудольф Дизель создал первый работоспособный двигатель, он не мог предвидеть, какие изменения претерпит его идея. Особенно большие...
-
Введение - Разработка и исследование алгоритма очистки речевого сигнала
Алгоритм очистка речевой сигнал Записанный или передаваемый по проводным или радиоканалам с помощью различных технических средств, звуковой, в частности,...
-
Каждый из нижележащих уровней осуществляет управление скоростью передачи данных. Физический уровень ответственен за синхронизацию записи и сканирования...
-
Рассмотрим процесс развития сетевых протоколов на примере стека TCP/IP. Нас интересует вопрос преемственности в развитии протоколов, и их обратной...
-
Принципы разработки и исследования любой сложной системы предполагают расчленение ее на части меньшего объема и сложности, которые можно исследовать по...
-
Пожарная безопасность - Разработка и исследование алгоритма очистки речевого сигнала
Особое внимание к пожарной безопасности является обоснованным, так как в случае пожара будет нанесен значительный материальный ущерб (даже если в...
-
Анализ показателей качества САУ с нелинейным аппроксимирующим законом управления
Ключевые слова: АППРОКСИМАЦИЯ НЕЛИНЕЙНОСТЕЙ, ЗАКОН УПРАВЛЕНИЯ, ПОКАЗАТЕЛИ КАЧЕСТВА, ОБЪЕКТ УПРАВЛЕНИЯ, ПРОЦЕСС ФЕРМЕНТАЦИИ Анализ показателей качества...
-
Особенности привода рулевого управления - Технология ремонта рулевого управления
Основная задача рулевого привода, это передать усилия от рулевого механизма на колеса и обеспечить тем самым поворот автомобиля под необходимым нам...
-
Законы управления (программы) переключения передач в автоматической трансмиссии обеспечивают оптимальную передачу энергии двигателя колесам автомобиля с...
Структуры алгоритмов бездатчикового управления - Бездатчиковое управление электроприводом