Разработка алгоритма работы системы - Модернизация системы регулирования температурных параметров на агрегате электролитического лужения АЭЛ-1200/III "АрселорМиттал Темиртау"
Силовое напряжение 380 В общецеховой сети подводится к клеммам. Х1-1,2,3 шкафа PLC и далее к вводному автоматическому выключателю Q1 расположенному в этом же шкафу. Данный выключатель обеспечивает полное снятие напряжения со всей системы регулирования температурных параметров агрегата и является главным коммутирующим элементом. Нагрузка на полюсах автомата распределена равномерно, в соответствии с потребляемой мощностью питаемых устройств.
Для защиты силовых кабелей и подключаемых полевых устройств, предусматриваются отдельные автоматические выключатели отходящих линий. Это позволяет независимо от остальных приборов выводить в ремонт нужный узел. Для этой же цели питание электроники +24В сервозадвижек выполнено отдельным кабелем на каждую задвижку от независимого источника питания.
Сервозадвижки в комплексе с PLC и программным обеспечением Modular PID Control позволяют организовать два вида регулирования: импульсный и позиционный.
Каждая из сервозадвижек может работать в четырех основных режимах:
- 1) автоматическом; 2) дистанционном первом режиме - с места оператора на центральном посту; 3) дистанционном втором режиме - с панели оператора установленной в технологическом подвале на лицевой панели шкафа PLC; 4) ручном режиме по месту.
Выбор режимов управления происходит с центрального поста посредством SCADA системы. Режимы работы расставлены по приоритетам, жестко оговоренным для каждого типа. При этом все команды управления ИМ (исполнительного механизма) режима более высокого приоритета имеют преимущество перед командами режима более низкого приоритета (их перебивают). При одновременном появлении на входах программного модуля управления ИМ команд разных режимов выполняется команда более приоритетного режима.
Ручной режим работы по месту подразумевает управление задвижкой с кнопочного пульта, размещенного на корпусе каждого электропривода. Управление в ручном режиме запрещает работу задвижек в автоматическом и дистанционном режимах. Работа в режиме управления с места оператора в технологическом подвале запрещает работу в первом дистанционном и автоматическом режимах и т. д. Самый низкий приоритет имеет автоматический режим управления. Это позволяет обеспечить работу системы в аварийных ситуациях.
Ручной запрет на выполнение команд автоматики прерывает исполнение текущей команды. Запрет выставляется оператором специальной командой с клавиатуры. Разрешить исполнение команд АУ можно, выдав с клавиатуры команду снятия запрета на автоматическое управление.
Запрет на движение исполнительного механизма (ИМ) в определенном направлении ( запрет на меньше, отключение, запрет на больше, включение) прерывает исполнение запрещенной команды(в режимах АУ и ДИСТ) и блокирует исполнение команд движения ИМ в запрещенном направлении.
Запрет может быть снят оператором подачей на ИМ команды "Отключение БЛК". Блок-схема работы модуля управления исполнительным механизмом приведена на рисунке 2.7.
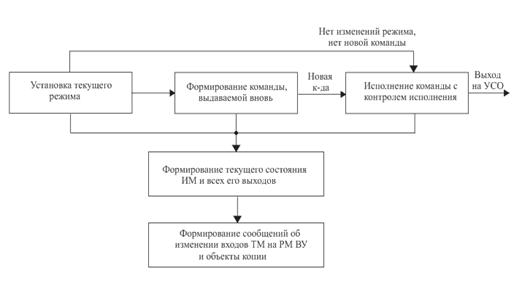
Рисунок 2.7 - Обобщенный алгоритм функционирования модуля управления ИМ
Перечень алгоритмических блоков, изображенных на рисунке:
- - установка текущего режима; - формирование вновь выдаваемой команды; - исполнение сформированной команды; - формирование текущего состояния ИМ; - формирование сообщения об изменении состояния ИМ и других выходов модуля управления ИМ.
ИМ при исчезновении команды приостанавливаются.
Если длительность сигнала на ИМ должна быть ограничена технологом должен использоваться параметр, приписанный команде и задающий допустимую длительность.
Если длительность команды заранее неизвестна (например, при установке клапана в определенное положение с помощью команд дистанционного управления), должна быть предусмотрена подача команды "стоп" в требуемый момент времени.
При управлении от оператора команда "стоп" формируется при отжатии клавиши, означающей команду на движение.
Запуск алгоритма осуществляется двумя способами: по временному такту или инициативно, по команде, пришедшей на один из командных входов.
В рамках установки режима:
- - считываются значения потенциальных входов модуля; - определяется, есть ли команды на командных входах; - определяется, есть ли запреты на установку режимов (например, запрет на АУ, отключение БЛК (Блокировок) и т. д.); - определяется, есть ли запрет на движение в направлении, задаваемом вновь пришедшей командой; - определяется, не был ли заказан и не истек ли временной интервал, позволяющий оператору вмешательство в действие более приоритетных режимов; - определяется самый приоритетный на данный момент режим с учетом режима, установленного ранее.
Если вновь определенный режим совпал с установленным ранее и при этом на входах этого режима не появилось новой команды, продолжается реализация исполнения ранее полученной команды.
Если вновь, полученная команда не является командой на движение ИМ, как например, команда, с клавиатуры на запрет АУ (автоматического управления), то происходит установка признака, запрещающего впредь до разрешения режим АУ и отбивающего запрещенный режим, если в момент прихода запрета он установлен.
Команда, выполнявшаяся ранее в запрещенном теперь режиме, снимается. Если режим не изменился, но появилась новая команда, или, если режим изменился, то осуществляется переход к блоку "Формирование вновь выдаваемой команды".
В рамках формирования вновь выдаваемой команды:
- - определяется, совпадает ли вновь выдаваемая команда по направлению с реализуемой в данный момент; - при несовпадении команд для каждого типа ИМ определяется приоритет вновь пришедшей команды (внутри одного режима), если ее приоритет выше, команда перебивает исполняемую; - определяется команда (или последовательность команд), которые передаются блоку исполнения команд; - при совпадении команд по направлению исполняемая команда продолжает действовать; - запускается отсчет временных интервалов, заданных как параметры настройки команды: длительность сигнала, выдаваемого на ИМ, и время, спустя которое оператор имеет право вмешаться в процесс исполнения высокоприоритетных команд.
В рамках исполнения команд:
- - реализуется контроль исполнения команды для каждого типа ИМ свой (по датчикам KB и тока, временным интервалам схода, хода и т. д.) с заданным временным тактом; - реализуется снятие сигнала по факту выполнения команды (прихода ИМ в требуемое состояние) или по истечению времени его удержания, заданному как параметр в команде или указанный в паспорте, как время полного хода.
В системе имеется возможность проведения диагностики исполнительных механизмов.
Освещение и штепсельные розетки устанавливаются в шкафу PLC и питаются от сети ~220 В Ф+N через выключатель QF4.
Вентиляция шкафов осуществляется осевым приточным вентилятором типа - размер № 5 с фильтром, который устанавливается внизу двери шкафа.
Две решетки с фильтром устанавливаются на боковых стенках шкафа в верхней части.
Двигатель вентилятора двухфазный ~220 В подключается к сети питания через выключатель QF4.
Включение. и отключение вентилятора автоматическое через температурное реле SK1.
Питание электроники UZ1 и вспомогательное напряжение 24В UZ3 для полевых устройств, обеспечивается двумя независимыми источниками питания SITOP MODULAR10 с выходным напряжением +24В и максимальным током 5А.
Блоки питания имеет гальваническую развязку входных и выходных цепей, одно и двух фазное входное напряжение, защиту нагрузки от перенапряжения и короткого замыкания.
Питание по сети 220В исполнительных механизмов и расходомеров осуществляется через индивидуальные однополюсные автоматические выключатели в шкафу PLC.
От отдельного автомата, расположенного в том же шкафу, питается и шкаф PC [3].
На двери шкафа PLC установлены панель оператора ОР1 и сигнальная лампочка HL1 наличия входного напряжения питания. С панели оператора возможно задание температур, управление положением сервозадвижек в режиме дистанционного управления, просмотр значений расхода обессоленной воды и времени.
Основное управление работой систем выполняется с центрального поста оператора - технолога. На посту расположен персональный компьютер с монитором клавиатурой и мышью.
Информация и команды передаются по сети Profibus-DP [4].
Похожие статьи
-
Для предупреждения травматизма на участке применяются заграждения, защитные короба, а так же запрещающие, предупреждающие, предписывающие знаки....
-
При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления. Под структурой управления понимается...
-
Охрана труда на участке Цех жести предназначен для производства жести с покрытием оловом, жести черной, ленты, полос из декапированной, кровельной и...
-
Рассчитываем условный диаметр проходного сечения сервозадвижки трубопровода: (2.5) Где QMax - максимальный расход, м3/с; С - плотность, кг/м3; О -...
-
Агрегат электролитического лужения (линия лужения) АЭЛ-1200/III предназначен для нанесения на поверхность стальной холоднокатаной полосы олова...
-
Для измерения температуры растворов выбираем термометры сопротивления Pt100 двух типов, отличающихся глубиной монтажной части. На трубопроводах с...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Наладку систем автоматизации начинают до полного завершение всех монтажных работ на объекте. При этом необходимо убедиться в том, что отдельные приборы...
-
Согласно РНТП 0,1-94, технологический процесс в цехе жести относится к категории "В". Производство жести связано с обработкой негорючих веществ и...
-
В системе стимулирования труда ведущее место занимает заработная плата. Она является главным источником повышения благосостояния трудящихся, поскольку...
-
Электрической проводкой (электропроводкой) называется совокупность проводов и кабелей с относящимися к ним креплениями, поддерживающими и защитными...
-
Для установки на рабочих местах термопреобразователей сопротивления используют закладные конструкции. Монтаж термопреобразователей сопротивления...
-
Структура цеха Задачей электромонтеров является обеспечение надежной работы средств автоматизации. В средства автоматизации входят: датчики,...
-
Так как производится модернизация системы регулирования температурных параметров на агрегате электролитического лужения АЭЛ-1200/3, то возникает вопрос,...
-
Технологический процесс цеха Цех жести предназначен для производства жести с электролитическим покрытием оловом, ленточной стали, листов и рулонов...
-
В процессе труда в производственном помещении человек находится под влиянием определенных метеорологических условий, или микроклимата - климат внутренней...
-
Расчет численности дежурного и ремонтного персонала КИП и А Для повышения эффективности производства имеет рациональное зна-чение использования трудовых...
-
Характеристика объекта автоматизации Полосы черной жести, задаваемые в линию АЭЛ, должны иметь следующие характеристики. 1 Марка стали 08кп, 08пс, 08ю. 2...
-
В зависимости от происхождения, состава и качественных характеристик загрязнений (примесей) сточные воды подразделяются на 3 основные категории:...
-
В основных направлениях экономического и социального развития Республики Казахстан на 2010 - 2015 годы и на период до 2030 года поставлена задача во всех...
-
Расчет прямого фонда заработный платы определяется по формуле: ЗПр = tЧ * T (4.12) Где tЧ - часовой тариф, ч. Т - количество отработанных часов, ч ЗПр =...
-
Расчет прямого фонда заработной платы определяется по формуле: ЗПр = tЧ * T (4.1) Где tЧ - часовой тариф, ч. Т - количество отработанных часов, ч ЗПр =...
-
Холодильная автоматизированная установка состоит из трех компрессоров (КМ), оснащенных устройствами автоматической защиты, маслоотделителя (МО), сборника...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Способы изменения направления тока - Разработка стенда управления шаговым двигателем
При работе шагового двигателя требуется изменение направления маг-нитного поля независимо для каждой фазы. Изменение направления магнит-ного поля может...
-
Нагрузка кранов, как правило, изменяется в широких пределах: для механизмов подъема - от 0,12 до 1,0 а для механизмов передвижения - то 0,5 до 1,0...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Автоматизация оборудования позволяет увеличить его производительность, сократить затраты материалов, топлива и энергии за счет более рационального их...
-
Проектируемая система адаптивного управления представляет собой комплексную систему автоматического регулирования, состоящую из двух подсистем,...
-
Особенности эксплуатации электропроводных ГПА - Работа газоперекачивающих агрегатов
Основная задача при организации обслуживания электроприводных компрессорных станций заключается в обеспечении надежной бесперебойной работы оборудования,...
-
Эксплуатация ГПА газотурбинным проводом - Работа газоперекачивающих агрегатов
Обслуживание ГПА (пуски, остановки, эксплуатация и регламентные работы) должно проводиться в соответствии с требованиями технических инструкций...
-
ОБЩАЯ ХАРАКТЕРИСТИКА УСЛОВИЙ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ - Надежность систем автоматизации
Автоматические системы, а также их отдельные элементы при эксплуатации находятся под воздействием различных факто-ров, которые будем называть нагрузками....
-
Просеиватель МПМ-800м Этот просеиватель предназначен для просеивания муки. Подвешенный мешок с мукой подается к загруженному бункеру, в который...
-
Методы настройки двухсвязных систем регулирования - Автоматические регуляторы
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой...
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
При подборе оборудования учитывают показатели основных его свойств: потребительских, отражающих полезный эффект от использования...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
Функциональная схема системы автоматизации приведена на рис. Э1. В дополнение к существующим подсистемам включены следующие: АСК концентрации входящей...
-
Алгоритм работы предлагаемого дискретного анализатора частотного спектра сигнала [7, 9...15] основан на представлении анализируемой функции у(t) в виде...
-
Система смазки консоли включает в себя плунжерный насос золотниковый распределитель, маслораспределитель и отходящие от него трубки, подающие масло к...
Разработка алгоритма работы системы - Модернизация системы регулирования температурных параметров на агрегате электролитического лужения АЭЛ-1200/III "АрселорМиттал Темиртау"