Описание работы электросхемы моста - Электрооборудование мостового крана

Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения силового контроллера или командоконтроллера. Симметричные схемы применяют для приводов механизмов передвижения, а в некоторых случаях и для приводов механизмов подъема. В таких схемах при одинаковых по номеру положения рукоятки (маховика) контроллера, при движении в разные стороны двигатель работает на аналогичных характеристиках щ = F(M). Несимметричные схемы используют для приводов механизмов подъема когда при подъеме и спуске груза требуется, чтобы двигатель работал на различных характеристиках, так как обычно.
На чертеже представлена электрическая схема управления асинхронным двигателем с фазным ротором по средствам контроллера типа ПС, который имеет симметричную схему и применяется для механизмов передвижения и подъема.
Напряжение на контроллер подается через панель ПЗК. Одна фаза Л3 подводится к статору двигателя Д непосредственно, а две фазы Л1и Л2 - через контроллер. В первом положении Вперед (Подъем) рукоятки контроллера замкнуты контакты К1 и К5, чем обеспечивается изменение порядка чередования фаз напряжения на зажимах статора С1, С2, и С3.
Одновременно со статором двигателя в сеть включают тормозной электромагнит ЭмТ, растормаживающий механизм (троллейный токопровод, показанный на схеме, применяется только для привода
При дальнейшем перемещении рукоятки контроллера в положения 2- 5 Вперед (Подъем) или Назад (Спуск) замыкаются контакты К2, К4, К6,
К8, К10 и шунтируются ступени пусковых резисторов в цепи ротора двигателя.
Резисторы выводятся по фазам несимметрично, что позволяет уменьшить число переключающих контактов контроллера при требуемом числе пускорегулировочных ступеней и получить механические характеристики, обеспечивающие требуемый режим работы механизма.
При пуске оператор должен переводить рукоятку из одного положения в другое с некоторым интервалом времени, в противном случае могут возникнуть недопустимые броски токов и моментов двигателя. Характеристика 1 с малым моментом при щ = 0 используется для устранения люфтов в редукторах и слабины канатов при пуске двигателя.
При опускании средних и тяжелых грузов с полной скоростью двигатель работает в генераторном режиме (например, при моменте Мс1 угловая скорость - щ1). Пониженную угловую скорость в этом случае можно получить на положении контроллера 1 Подъем (например), угловая скорость - щ1 при МС1), т. е. при работе двигателя в режиме противовключения.
Легкие грузы, не преодолевающие трение в механизме, и пустой крюк опускается при работе двигателя в двигательном режиме на положениях контроллера Спуск (например, при моменте - МС2 угловая спуска на характеристике 1 - низкая скорость - щ2). Схема обеспечивает защиту двигателя от перегрузок по току с помощью группового максимального реле РМ (РМ1 - РМ3).С помощью контактов К9, К11, К12 создаются цепи конечной и нулевой.
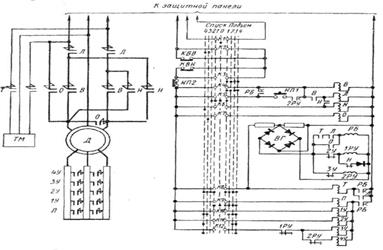
Рис.7 Схема магнитного контроллера ККТ-64.
Поскольку данный магнитный контроллер не имеет собственных аппаратов защиты, то он подключается к сети через защитную панель. Подключение обмотки статора к сети осуществляется линейным контактором Л и реверсирующими контакторами В и Н. Для однофазного включения двигателя используется контактор О, а для подключения тормозного магнита ТМ - контактор Т. При спуске и регулировании скорости сопротивления в цепи ротора переключаются с помощью контакторов ускорения 1У - 4У и контакторов противовключения П.
Крановщик воздействует при управлении на командоконтроллер, имеющий 12 контактов и 9 фиксированных положений рычага (или валика): Нулевое положение, 4 положения подъема и 4 спуска.
Пуск двигателя в данной схеме автоматизирован с помощью электромагнитных реле времени 1РУ и 2РУ} катушки которого питаются постоянным током от выпрямительного блока ВГ. Контакторы В и Н, а также Л и О механически попарно сблокированы, что предотвращает их одновременное включение.
На первом положении подъема срабатывают контактор В и реле 1РУ,2РУ, контактор Д контактор Т, реле РБ, затем контактор П. В результате двигатель подключается к сети, растормаживается и из цепи его ротора выключается часть сопротивления.
Во втором и третьем положениях срабатывают соответственно контакторы 1У и 2У, выключаются соответствующие сопротивления из цепи ротора. При включении контактора 2У отключается катушка 1РУ, в результате чего с выдержкой времени замыкается контактор 1РУв цепи катушек ЗУ и 4У.
Если перевести контролер в положение 4 подъема, то сработает контактор ЗУ, будет отключена катушка 2РУ, после чего с выдержкой времени включится контактор 4У.
При спуске груза вместо контактора В включается контактор Н.
|
Тип электрооборудования |
Марка Кол-во |
|
Электродвигатель |
МТН-512-6 1 |
|
Магнитный контроллер |
ККТ-64 1 |
|
Ящик сопротивлений |
2ТД.754.054-06 2 |
|
Ящик сопротивлений |
2ТД.754.054-11 1 |
|
Защитная панель |
ПКЗ 160 1 |
|
Конечные выключатели |
КУ-703 8 |
|
Тормозной электромагнит |
КМТ 4А 1 |
|
Реле защиты 401 |
2ТД.304.096 - 4 3 |
|
Электромагнит 401 |
6ТД.237.004 - 2 3 |
Похожие статьи
-
Нагрузка кранов, как правило, изменяется в широких пределах: для механизмов подъема - от 0,12 до 1,0 а для механизмов передвижения - то 0,5 до 1,0...
-
Крановые защитные панели: Крановые защитные панели применяют при контроллерном управлении двигателями крана, а также вместе с некоторыми магнитными...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
-
Расчет мощности электродвигателя привода мостового крана по нагрузочному графику и выбор электродвигателя в каталоге Исходными данными проектирования...
-
Мостовые краны Электрические подъемные краны - это устройства служащие для вертикального и горизонтального перемещения грузов. Подвижная металлическая...
-
Статистические моменты, приведенные к валу двигателя: 1. При подъеме груза (8) - вес поднимаемого груза, Н; - вес грузозахватного устройства, Н; -...
-
Исходные данные: 1) Вес поднимаемого груза Gг=80 т 2) Вес грузозахватывающего устройства Gо=0, 1 т 3) Скорость подъема Vп=6 м/мин 4) Высота подъема Н=6 м...
-
ВВЕДЕНИЕ - Электрооборудование мостового крана
Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на не большие расстояния. По особенностям...
-
Специальная часть, Обоснование и выбор тока - Электрооборудование механизма подъема мостового крана
Обоснование и выбор тока Электропривод переменного тока с асинхронными электродвигателями становится все популярнее. Асинхронные двигатели имеют простоту...
-
Описание работы принципиальной схемы - Электрооборудование механизма подъема мостового крана
Для начала работы электротехнический персонал собирает схему, включая автоматические выключатели QF1, QF2, QF3. Одновременно с подачей напряжения...
-
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором...
-
Выбор реле защиты от перегрузок - Проект мостового крана
Обеспечение максимальной и нулевой защиты крановых электроприводов управляемых при помощи магнитных контроллеров возлагается на защитные панели. Для...
-
Контакторы серий КТ и КТП предназначены для ком - мутации главных цепей электроприводов переменного тока с номинальным напряжением 380 В. Контакторы...
-
Выбираю преобразователь КТЭ 320/220 А (440 В) Семейство продуктов КТЭ Тип изделия или компонента Привод с регулируемой частотой вращения Специальное...
-
Описание работы программируемого контроллера - Электрооборудование механизма подъема мостового крана
Принцип работы ПЛК несколько отличается от "обычных" микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух...
-
Описание технологического процесса Современные прокатные цеха являются важнейшим звеном металлургического производства, в значит, степени определяющим...
-
Задание: спроектировать механизм подъема груза мостового крана общего назначения. Дано: грузоподъемность кг; скорость подъема ; высота подъема ; режим...
-
Сведения о технике безопасности 1. При осмотре, очистке от пыли кожухов электродвигателя и аппаратуры управления без отключения и остановки...
-
Выбор аппаратуры управления, Выбор магнитного контроллера - Проект мостового крана
Выбор магнитного контроллера Магнитные контроллеры представляют собой сложные комплектные коммутационные устройства для управления крановыми...
-
Программируемый логический контроллер(ПЛК) (англ. Programmable Logic Controller, PLC) или программируемый контроллер -- электронная составляющая...
-
Расчет и выбор кабельной продукции - Электрооборудование механизма подъема мостового крана
Выбор кабельной продукции производиться по экономической плотности тока. Расчет сечения кабеля по мощности нагрузки или потребляемому току производится...
-
Заключение, Используемая литература - Электрооборудование механизма подъема мостового крана
В ходе проделанной работы обоснован и выбран род тока, рассчитан и построены нагрузочные диаграммы, посчитана мощность механизма подъема мостового крана...
-
Спецификация основного электрооборудования Сметная стоимость электрооборудования Тип Электрооборудования Марка Кол.-во Цена за шт. руб. Общая стоимость...
-
История развития электропривода - Электрооборудование механизма подъема мостового крана
Появление ЭП обусловлено трудами многих отечественных и зарубежных ученых-электротехников. В этом блистательном ряду имена таких крупных ученых как...
-
Крановые защитные панели - Рубильник и защитная панель
Конструкция защитной панели представляет собойметаллический шкаф с установленной в нем аппаратурой. Шкаф закрыт дверью с замком. Второй замок...
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Выбор электродвигателя Построив циклограмму работы перегружателя определили ПВРасч механизма подъема: ПВРасч=83%. Необходимая мощность электродвигателя...
-
Выбор исходных данных и силовая схема к расчету Вес крана GТ=1818к Н Вес груза GГр=360 кН Скорость передвижения крана V=1.25м/с Диаметр колеса D=0.95 м...
-
1. Тележка (рис.4) имеет опорные ходовые колеса 1 и 2. Ходовое колесо 1 приводится в движение при помощи электродвигателя 3 через редуктор 4. На...
-
Описание и работа, Назначение изделия - Приводы
Назначение изделия Приводы предназначены для прямолинейного реверсивного перемещения регулирующего органа в системах автоматического управления...
-
1. Тепловая защита на кранах не применяется, так как в условиях повторно кратковременного режима она приводит к ложному отключению. 2. Соответствие...
-
Статическая мощность электродвигателя: , Где - предварительное значение КПД (для механизма подъема с цилиндрическим редуктором). Вт. Для легкого режима...
-
Мостовой кран предназначен для подъема и перемещения грузов при производстве сборочных, монтажных, технологических и складских работ. Мостовой кран...
-
Краткое описание технологического процесса участка - Проект мостового крана
По способу подачи шихтовых материалов различают цехи с рельсовой подачей шихты и цехи с крановой подачей шихты. Основная масса мартеновской стали...
-
Система питания. Источник питания - трехфазная сеть переменного тока, напряжением 380* 10%, частотой 50 Гц. Напряжение вторичных источников: А)...
-
Изучение конструкций и исследование работы магнитных пускателей
Изучение конструкций и исследование работы магнитных пускателей Цель: Изучить конструкции и исследовать работы магнитных пускателей Ход работы А)...
-
Исследования, Гидравлический режим - Описание работы нагревательных котлов
Многочисленные обследования жаротрубных котлов показали некоторые особенности их эксплуатации. Гидравлический режим Основной особенностью гидравлического...
-
Конструкция ГЖК - Описание работы нагревательных котлов
Среди разнообразия производителей газовых жаротрубных котлов в то же время схемы движения дымовых газов и воды похожи. Для большинства котлов (КСВа...
-
Ремонт металлургического оборудования Успешное проведение работ по монтажу оборудования зависит от рациональной планировки и организации монтажной...
Описание работы электросхемы моста - Электрооборудование мостового крана