Вибір та обгрунтування функціональної схеми моноімпульсної РЛС та структурної схеми азимутального радіоприймального каналу, Розробка функціональної схеми моноімпульсної РЛС - Радіоприймальний пристрій бортової моноімпульсної радіолокаційної станції
Розробка функціональної схеми моноімпульсної РЛС
Виходячи з послідовності операцій, які виконує моноімпульсни система, її функціональна схема повинна містити наступні основні елементи:
- - Кутовий датчик, що формує сигнали, в співвідношеннях параметрів яких міститься інформація про кутове положення цілі. - Перетворювач інформації, що здійснює перетворення параметрів сигналів. - Кутовий дискримінатор, що виділяє функцію відношення параметрів сигналів, однозначно пов'язану с кутом приходу.
Кутовим датчиком слугує антена моноімпульсної системи, в якості перетворювача використовується сумарно - різницевий перетворювач у вигляді хвилевого трійника.
В схемі кутового дискримінатора для утворення проміжної частоти в обох приймальних каналах застосовується один гетеродин, це дозволяє зберегти симетрію двух сигналів та підтримувати когерентність фаз між ними. Відношення прийнятих сигналів, яке характеризує напрям приходу, утворюється завдяки властивості нормування застосовуваних в схемах підсилювачів.
В сумарно - різницевому кутовому дискримінаторі приведеному на рисунку 1.1 утворення відношення забезпечується АРП в обох каналах.
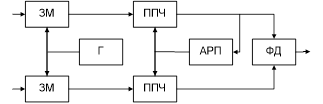
Рисунок 1.1 - Сумарно - різницевий кутовий дискримінатор
Система АРП амплітудної сумарно - різницевої моноімпульсної РЛС, дозволяє забезпечити незалежність сигналу помилки від амплітуд приймальних сигналів завдяки нормуванню амплітуд сумарного та різницевого сигналів відносно амплітуди сумарного сигналу. Схема даної системи приведена на рисунку 1.2. Різницевий та сумарний сигнали з перетворювача подаються в ППЧ. Кожний сигнал має своє коло АРП. Автоматичне регулювання підсилювача в кожному ППЧ здійснюється подачею на їх входи коротких контрольних імпульсів проміжної частоти, які створює генератор імпульсів, амплітуда яких змінюється пропорційно необхідному підсиленню. Ці імпульси подаються з деяким випередженням в часі відносно зондую чого імпульсу передавача РЛС.
Блокінг - генератор виробляє сигнали, які запускають генератор імпульсів. Одночасно ці сигнали подаються через лінію затримки на модулятор передавача, чим забезпечується запізнювання зондуючи імпульсів відносно контрольних імпульсів. Імпульси з виходу генератора імпульсів надходять на двухкаскадний ППЧ зі змінним підсиленням і потім через атенюатор подаються на ППЧ сумарного та різницевого каналів. Далі контрольні сигнали детектуються і подаються на відео підсилювач і далі на детектор системи АРП. На ці ж детектори подаються імпульси від блокінг - генератора. На детектори подається напруга затримки і тому детектуються тільки сигнали які перевищують цю напругу. Коли ціль буде виявлена і відбудеться її автозахват по дальності, в двухкаскадний ППЧ подається позитивна напруга, пропорційна сумарному сигналу, що викликає підсилення контрольних імпульсів. В результаті схема АРП здійснює нормування сумарного і різницевого сигналів відносно амплітуди сумарного сигналу та забезпечує рівність амплітуд контрольних імпульсів, що подаються на ППЧ сумарного та різницевого каналів.
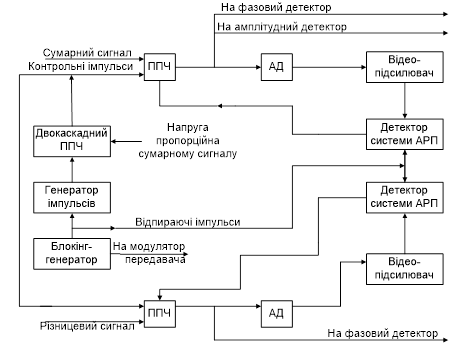
Рисунок 1.2 - Структурна схема системи АРП амплітудної сумарно - різницевої РЛС
Моноімпульсний канал антена азимутальний
В моноімпульсних системах для пеленгування в двох площинах з сумарно - різницевим дискримінатором на відмінну від систем пеленгування в одній площині застосовується антена з чотирма ДН (замість двох), три або чотири хвилеводних моста (замість одного), додається ще один різницевий приймальний канал, і ряд інших елементів.
В моноімпульсній системі супроводу застосовується параболічна антена з контррефлектором. Сумарний та різницевий сигнали з виходів мостів надходять в приймальний пристрій в якому вони підсилюються і нормуються. Нормування по амплітуді здійснюється за допомогою системи АРП. Сигнали з виходу сумарного приймача використовуються для визначення дальності. Амплітуда різницевого сигналу визначає кутову помилку, а різниця фаз між сумарним та різницевим сигналом - її знак, тобто напрям відхилення цілі від рівносигнального напрямку. Для виявлення цілі здійснюється кутовий пошук цілі в даному секторі відносно даних цілевказання.
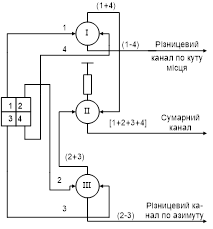
Рисунок 1.3 - Схема утворення сумарного та різницевого сигналів при використанні 3-х хвилеводних мостів
Функціональна схема проектованої системи зображена на рисунку 1.4 Для визначення дальності будемо використовувати цифровий вимірювач. Як вже було сказано раніше, сумарний канал використовується для визначення дальності. Враховуючи ці моменти можна представити функціональну схему моно імпульсної РЛС.
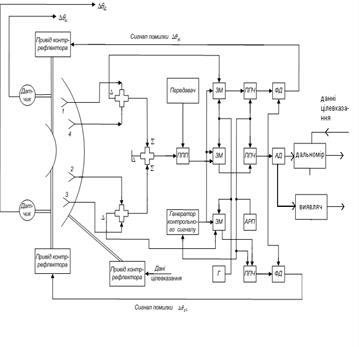
Рисунок 1.4 - Функціональна схема бортової моноімпульсної РЛС для пеленгації в двох площинах
Похожие статьи
-
Входить до складу РЛ вимірювач кутових координат повинен визначати азимут і кут місця цілі і містить два ідентичні за схемою каналу: азимутальний і...
-
Антеною називається радіотехнічний пристрій, який призначений для випромінювання і приймання електромагнітних хвиль. Антена є однією з найважливіший...
-
Зазвичай в РЛС сантиметрового діапазону у якості малошумлячого підсилювача МШП надвисоких частот НВЧ використовують тільки напівпровідниковий...
-
Робота блоку розпочинається з того, що центральний процесор формує на лініях КДА00-15Н адрес, він надходить на шинні формувачі (ШФ), і при цьому...
-
Для шинних формувачів вибираємо 4 мікросхеми К589АП26. Вхідний вузол формуємо на мікросхемах КР1533ЛЕ1 - 4 незалежних елементи "2 ИЛИ-НЕ". Сигнал ВБ...
-
ОБГРУНТУВАННЯ ТА РОЗРОБКА СТРУКТУРНОЇ СХЕМИ ВИМІРЮВАЛЬНОГО ПРИЛАДУ - Цифровий вимірювач ваги
Для того, щоб визначитись із структурною схемою цифрового вимірювача ваги, необхідно вибрати первинний перетворювач, датчик ваги. Згідно індивідуального...
-
Необхідність подальшого удосконалення військових засобів РР зв'язку та їх основних частин На озброєнні в підрозділах і частинах ЗС МО України знаходиться...
-
РРС Р-415 призначена для створення тимчасових швидкорозгортаємих малоканальних радіорелейних ліній зв'язку, а також для відгалуження каналів від...
-
Вимірювач частота сигнал потужність Пристрій повинен складатися зі зовнішнього пульта, який під'єднується до паралельного порта ПЕОМ. Пульт повинен мати...
-
Так як ми вже визначились зі структурною схемою приладу, то потрібно розробити електричну принципову. Спочатку визначимось з усіма складовими окремо. В...
-
У варіантах реалізації приладу, розглянутих у 1 розділі немає можливості задавати частоту вихідного сигналу, а тільки амплітуду, що не задовольняє умови...
-
Основний недолік аналогових РРЛ є те, що викривлення переданих по них сигналів, які виникають у процесі формування, перетворення, ущільнення і...
-
Дзеркальні антени мають найбільший КСД при синфазному збудженні розкриву (плоский фазовий фронт хвилі). Параболічний профіль дзеркала забезпечує однакові...
-
Для обгунтування власного технічного рішення робимо висновки з інформації наведеної в пункті 8. 1. Наявність в кондиціонері такої базової функції, як...
-
Головна схема електричних з'єднань електростанції вибирається на підставі декількох технічних прийнятних варіантів, які відповідають основним вимогам, що...
-
До приймачів РЛС пред'являються жорсткіші вимоги, ніж до приймачів іншого призначення. Багато РЛС є частиною стратегічних комплексів виявлення об'єктів....
-
Визначення діаметра розкриву антени Дзеркальна антена - спрямована антена, яка містить первинний випромінювач і відбивач антени у вигляді металевої...
-
Висновок - Розробка структурної схеми перспективної радіорелейної станції
У другому питанні були розглянуті типові РРС, які зостосовуються в ЗСУ, та загальна структурна схема аналогової РРС. Викладені перспективи та головні...
-
Вихідні дані: адреси блоку - 160636, 160640; напруга живлення логічного блоку - 5В; напруга живлення зовнішніх пристроїв - 24 В; індикація станів схеми;...
-
Радіолокаційна станція включає в себе потужні НВЧ пристрої, в яких генератори високочастотної енергії мають потужність близько сотень кіловат в...
-
Вплив потужних електромагнітних полів на людини призводить до певних зрушень у нервово-психічної і фізіологічної діяльності, однак як припускають,...
-
Розміри розкриву рупора виберемо по необхідної діаграмі спрямованості у відповідній площині. Ширина діаграми спрямованості пов'язана з розмірами розкриву...
-
Вступ - Радіоприймальний пристрій бортової моноімпульсної радіолокаційної станції
Радіолокація - галузь науки і техніки, об'єднуюча методи і засоби виявлення, виміри координат, а також визначення властивостей і характеристик різних...
-
Цифрові засоби регулювання тиском в гермокабіні літака мають два незалежних канали управління, кожний з який містить свій керуючий модуль. Один з каналів...
-
ВИСНОВОК, ЛІТЕРАТУРА - Проектування головної схеми електричної станції
У роботі була спроектована електрична станція типу - ТЕЦ, Потужністю - 4Ч60 Мвт. Спроектована станція призначена для видачі потужності в енергосистему...
-
Розроблений пристрій призначений для проведення лабораторної роботи з предмету "Цифрова схемотехніка". Він дозволяє дослідити та наочно показати роботу...
-
За вихідними даними нам потрібно реалізувати: формувач сигналу, що реалізує функцію 4-х вхідних сигналів за ознакою більшості; формувач сигналів Fx та...
-
Робота блоку розпочинається з того, що центральний процесор формує на лініях КДА00-15Н адрес, він надходить на шинні формувачі (DD1-DD4), і при цьому...
-
Визначається кількість абонентських модулів на ОПС і ПС, що відповідає числу ГТ до УКС. На станції застосовуються два типи модулів: абонентський модуль...
-
Повністю схема функціональна подана у додатку. Нижче розписано основні аспекти стосовно розробки кожного окремого вузла. Розробка вузла синхронізації...
-
Перелік посилань - Радіоприймальний пристрій бортової моноімпульсної радіолокаційної станції
Моноімпульсний канал антена азимутальний 1. Сиверс А. П. Проектирование радиоприемных устройств. Москва, "Советское радио" 1976. - 480 с. 2. Клич С. М....
-
Техніко-економічне обгрунтування - Створення комутаційної техніки на основі цифрових систем передачі
"Квант" призначено для побудови центральних ЦС, вузлових УС, кінцевих станцій ОС і вузлів автоматичної комутації УАК, що включаються до відомчої і...
-
Інженерний розрахунок просторової діаграми спрямованості параболічної антени зводиться до визначення діаграми спрямованості ідеальної круглої синфазної...
-
Радіолокаційна станція - об'єкт підвищеної небезпеки. Наявність небезпечних і шкідливих виробничих факторів при роботі на РЛС обумовлено специфікою...
-
Залежно від розміщення опромінювача щодо дзеркала можна отримати, те чи інше значення КНД. При певному оптимальному відношенні R / f КНД найбільший. Це...
-
Останнім часом у вітчизняній і закордонній літературі, присвяченій розробці та аналізу приймально-передавальних пристроїв, саме на приймальний тракт...
-
Електроенергетика є основою економіки будь-якої країни. Роль електричної енергії пояснюється універсальністю її використання, можливістю передавати на...
-
Для передачи непрерывных сообщений можно воспользоваться дискретным каналом. При этом необходимо преобразовать непрерывное сообщение в цифровой сигнал,...
-
Структурна схема кінцевої станції ЦСП - Принципи побудови апаратури цифрових систем передачі (ЦСП)
Структурна схема кінцевої станції ЦСП наведена на рис. 3. До її складу входять індивідуальне (ІО) та групове обладнання (ГО). Індивідуальне обладнання...
-
Вступ - Розробка блоку зв'язку з електроавтоматикою верстата 16Б16. Пристрій управління шпінделем
Числове програмне керування (ЧПК) (англ. Computer numerical control) - комп'ютеризована система керування, яка зчитує командні інструкції спеціалізованої...
Вибір та обгрунтування функціональної схеми моноімпульсної РЛС та структурної схеми азимутального радіоприймального каналу, Розробка функціональної схеми моноімпульсної РЛС - Радіоприймальний пристрій бортової моноімпульсної радіолокаційної станції