ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА ВАРІАНТІВ РЕАЛІЗАЦІЇ ПРИЛАДІВ, ЗАБЕЗПЕЧУЮЧИХ ЗСУВ ФАЗИ - Цифровий прилад для повірки фазометрів
У відповідності до завдання нам потрібно розробити мікропроцесорний прилад для повірки фазометрів. Завдання зводиться до реалізації генератора синусоїдальної напруги з керованою частотою, фазозсуваючого кола з можливістю керування різницею фаз та елементів, з допомогою яких можна було б керувати даними функціональними елементами у відповідності до введених даних і відображати ці дані.

Зсувом фаз називається модуль різниці аргументів двох гармонічних сигналів однакової частоти та, тобто різниця початкових фаз (мал. 1.1):


. (1.1)
Зсув фаз є сталою величиною і не залежить від моменту відліку.
Зазвичай через позначають інтервал часу між моментами, коли сигнали знаходяться в однакових фазах, наприклад при переходах через нуль від від'ємних до додатних значень. Тоді зсув фаз, або
, (1.2)
Де Т - період гармонічних сигналів.

Зсув фаз з'являється, коли електричний сигнал проходить через коло, в якому він затримується. Коливальні контури, фільтри, фазозсуваючі кола та інші чотириполюсники призводять до зсуву фаз між вхідною та вихідною напругами, де - час затримки в секундах. Підсилювальний каскад звичайного типу вносить зсув фаз, рівний. Багато радіотехнічних пристроїв, таких як радіолокаційні, радіонавігаційні, телевізійні, широкополосні підсилювачі всіх значень, фільтри - характеризуються поряд з іншими параметрами фазочастотною характеристикою, тобто залежністю зсуву фаз від частоти. Фазова модуляція і маніпуляція широко застосовуються в апаратурі телеметрії і зв'язку; вимірювання зсуву фаз в цих пристроях є основною характеристикою як при настойці, так і в експлуатації.
Для вимірювання зсуву фаз використовуються наступні методи: осцилографічний, компенсаційний, перетворення зсуву фаз у імпульси струму та метод дискретного підрахунку.
Фазозсуваючим колом називається пристрій, за допомогою якого в електричне коло вводиться відомий і регульований зсув фаз. Конструкція фазозсуваючого кола залежить від діапазону робочих частот, для якого він призначений.
Існує багато способів реалізації приладу, який забезпечував би вихідний сигнал із регульованим зсувом фаз. Розглянемо кілька таких схем.
Широко поширені калібратори фази рисунок 1.2, принцип дії яких полягає у додаванні двох синусоїдальних напруг, зміщених одна відносно іншої на 90. Діапазон регулювання фазового зміщення при цьому становить 0-90, а його розширення до 360 здійснюється введенням комутатора опорних напруг.
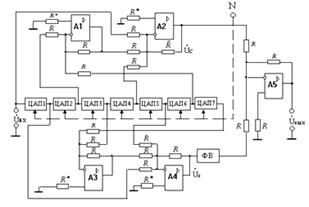
Рисунок 1.2 - Калібратор фази з лінійним перетворенням керуючого коду у зсув фаз.
При регулюванні фазового зміщення в межах 0-90 вихідна напруга калібратора фази формується відповідно до залежності

, (1.3)
Де UВх - амплітуда опорних напруг;
K1 і k2 - вагові коефіцієнти.
Амплітуда й фаза вихідної напруги пов'язані з ваговими коефіцієнтами k1 і k2 співвідношеннями
, (1.4)

. (1.5)
Калібратори фази, що керуються цифровим кодом, повинні забезпечувати лінійне перетворення керуючого коду у фазове зміщення вихідної напруги. Крім того, у більшості практичних випадків необхідно забезпечити сталу амплітуду вихідної напруги у всьому діапазоні регулювання фазового зміщення. Для виконання цих вимог вагові коефіцієнти k1 і k2 повинні бути пов'язані з керуючим кодом нелінійними залежностями.
У калібраторі фази, структурна схема якого представлена на рисунку. 1.2, вихідна напруга є сумою двох синусоїдальних напруг Us і Uc, зміщених одна відносно одної на 90. Вони формуються із вхідної синусоїдальної напруги Uвх колом каскадно включених цифроаналогових перетворювачів ЦАП1 - ЦАП7 і суматорами, що інвертують, А1 - А4.

Передаточна функція i-го ЦАП виражається лінійною залежністю, де bI - масштаб перетворення i-го ЦАП;
, (1.6)
,
Де N і NMax - поточне й максимальне значення керуючого коду.
Застосовані в калібраторі фази ЦАП мають малий вихідний опір, що допускає їхнє каскадне включення без порушення нормального режиму роботи кожного окремо взятого ЦАП. Тому передаточну функцію n каскадно включених ЦАП з достатнім ступенем точності можна записати у вигляді
. (1.7)
На вхід першого ЦАП, що є входом калібратора фази, із зовнішнього генератора надходить синусоїдальна напруга Uвх. З нього колом каскадно включених ЦАП формуються напруги, амплітуди UN які пов'язані з керуючим кодом співвідношенням

, (1.8)

Де ; .
Напруги Un з виходів ЦАП і вхідна напруга використовуються для формування двох синфазних напруг Us і Uc, причому напруга Uc формується із вхідної напруги й напруг з виходів ЦАП з парними номерами, а вихідні напруги непарних ЦАП використовуються для формування напруги Us. Прийнявши вагові коефіцієнти сумуючих напруг Un і Uвх рівними одиниці й з огляду на додаткове інвертування відповідних напруг суматорами А1 і А3, залежності амплітуди напруг Us і Uc від керуючого коду можна представити у вигляді
US UВх(a1X a3X3+a5X5 a7X7) = UВхK2; (1.9)
UC UВх(1 a2X2+a4X4 a6X6) = UВхK1.
Таким чином, амплітуди напруг Us і Uc пов'язані з амплітудою синусоїдальної напруги Uвх, що надходить на вхід калібратора фази, коефіцієнтами k1 і k2, які у свою чергу мають нелінійну залежність від керуючого коду.
K1 = 1 a2X2+a4X4 a6X6; (1.10)
K2 = a1X a3X3+a5X5 a7X7.
Щоб одержати фазове зміщення 90 між напругами Us і Uc, одна з них, Us, подається на вхід фазозсуваючого кола ФВ, у результаті чого на входи суматора А5 надходять напруги UC і jUS. Вихідна напруга суматора А5, що є вихідною напругою калібратора фази, описується співвідношенням 1.3.

Фаза визначається керуючим кодом, а амплітуда вихідної напруги залежить тільки від амплітуди вхідної напруги UВх (у розглянутому випадку UВых=UВх).
Різниця між розрахунковими й заданими значеннями фази й амплітуди вихідної напруги буде малою, якщо точно моделюються функціональні залежності cosx і sinx.
Функції cosx і sinx можуть бути представлені у вигляді суми стандартного ряду, причому тим точніше, чим більше членів стандартного ряду при цьому використовується й чим менший діапазон зміни аргументу x. Коли задані числа членів ряду й діапазон зміни змінної x, задача мінімізації похибки моделювання зводиться до точного обчислення коефіцієнтів при членах ряду, що підсумовуються.
Методична фазова похибка і нестабільність амплітуди вихідної напруги визначаються співвідношеннями
, (1.11)

.
У схемах фазового автопідстроювання часто використовується генератор сигналу, фаза якого могла б регулюватися незалежно від інших параметрів. Пропонується схема (Рисунок 1.3), що складається з таймера типу 555 і декількох дискретних компонентів, яка представляє собою генератор імпульсів з незалежним і плавним регулюванням фази в межах від 0 до 180°.
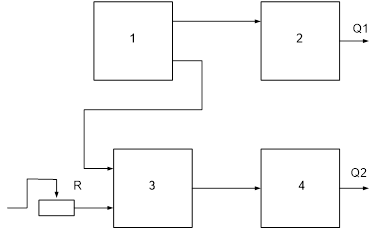
Рисунок 1.3 - Структурна схема генератора з регульованим зсувом фази.
Таймер із транзистором і конденсатором виступає в ролі генератора 1, який генерує пилкоподібний сигнал, максимальними значеннями якого є напруги Uж/3 і 2Uж/3. Кожному періоду пилкоподібного сигналу відповідає короткий імпульс на виході таймера. Цей імпульс перемикає тригер 2, що генерує опорний сигнал Q1. Сигнал з виходу компаратора 3, що порівнює пилкоподібний сигнал з опорною напругою на керуючому елементі змінного резистора R, перемикає тригер 4, що генерує імпульси Q2, зміщені по фазі щодо опорних.
Це зміщення фази лінійно залежить від опорної напруги на неінвертуючому вході компаратора 3, і положення движка R може бути відкаліброване в одиницях вимірювання фази, причому напрузі Uж/3 відповідає 0°, a 2Uж/3-180 . Оскільки тригер має два виходи, тому від схеми можна одержати сигнал як з випередженням по фазі, так і з запізненням щодо опорного.
Похожие статьи
-
Так як ми вже визначились зі структурною схемою приладу, то потрібно розробити електричну принципову. Спочатку визначимось з усіма складовими окремо. В...
-
У варіантах реалізації приладу, розглянутих у 1 розділі немає можливості задавати частоту вихідного сигналу, а тільки амплітуду, що не задовольняє умови...
-
Розрахуємо спочатку елементи клавіатури. В клавіатурі використовуються резистори R1, R3, R4, R5, R8, R10, R12, R15, R16, R18, R20, R21, R22, відповідно...
-
Будуть розглянуті особливості вимірювань у трифазних ланцюгах змінного струму наступних величин: діючих значень струму й напруги, активній і реактивній...
-
Мостовий генератор для УЗВ-п'єзовипромінювача - Аналітичний огляд генераторів коливань
В останні роки все частіше доводиться зіштовхуватися з ультразвуком - звуковими коливаннями, що мають частоту більшу, ніж здатна почути людина. У...
-
Для налаштування антени булоб добре знати потужність сигналу на виході конвертора. Це можливо зробити знаючи ЕІВП супутника (карти зон покриття тим чи...
-
ОБГРУНТУВАННЯ ТА РОЗРОБКА СТРУКТУРНОЇ СХЕМИ ВИМІРЮВАЛЬНОГО ПРИЛАДУ - Цифровий вимірювач ваги
Для того, щоб визначитись із структурною схемою цифрового вимірювача ваги, необхідно вибрати первинний перетворювач, датчик ваги. Згідно індивідуального...
-
Мультивібратори на біполярних транзисторах - Мультивібратори
Мультивібратори на біполярних транзисторах більш за все виконують за симетричною схемою з колекторно-базовими зв'язками (рис. 1,а). Як і для тригера,...
-
Порівняння схем випрямлення й орієнтований розрахунок випрямляча можна зробити використовуючи дані з таблиці. Тип схеми Uобр I макс I 2 U 2 C 0 * P0 % U...
-
Цифровий вимірювач ємності - Мікроконтролерний вимірювач ємності конденсаторів
В роботі наведено відносно простий цифровий вимірювач ємності. Є декілька методів вимірювання ємності, наприклад, за допомогою моста опорів або вимірюючи...
-
Мікросхема К1816ВЕ48 являє собою НВІС однокристальної восьмирозрядної мікро-еом з вбудованою перепрограмованою пам'яттю (ППЗП), зі стиранням інформації...
-
Импульсная характеристика оптимального фильтра это отклик фильтра на дельта-функцию и она определяется выражением: G(t) = aS(t - t) Таким образом,...
-
МікроЕОМ серії К1814 являють собою чотирирозрядні ОМЕОМ, призначені для побудови різних систем керування. До складу серії входить універсальна мікро-еом...
-
З погляду виробників мікропроцесорної техніки всі задачі, вирішувані системами вбудованого управління, поділяються на два великі класи: управління...
-
На автомобилях - автобусах требуется большой ток для питания ламп, освещающих пассажирский салон. Поэтому для них применяются специальные генераторы...
-
РОЗРАХУНОК ВХІДНИХ ТА ВИХІДНИХ ХАРАКТЕРИСТИК ВУЗЛІВ СТРУКТУРНОЇ СХЕМИ - Цифровий вимірювач ваги
Для визначення характеристик цифрового вимірювача ваги необхідно визначити значення вихідної напруги первинного перетворювача при мінімальному значення...
-
RC-генератори гармонійних коливань - Аналітичний огляд генераторів коливань
Для одержання гармонійних коливань низької й інфранизької частот (від декількох сотень кілогерців до часток герців) застосовують автогенератори, у яких...
-
Генератори гармонійних коливань Умова генерації гармонійних коливань Електронним генератором гармонійних коливань називають пристрій, що перетворює...
-
Температурні датчики. Термістори - Температурні датчики. Термістори
Однією з найбільш поширених завдань промислової, побутової та медичної автоматики, що вирішуються шляхом температурних вимірювань, є завдання виділення...
-
Система селективного нагрева ионов в установке "Плазменный сепаратор-1"
Описание экспериментальной установки ПС - 1 Для большей наглядности и лучшего понимания процесса ВЧ - нагрева плазмы в установке ПС - 1 опишу вкратце всю...
-
Проектирование схемы тактирования АЦП. - Разработка аналого-цифрового преобразователя
Схема тактирования предназначена для подачи тактовых импульсов, а также для подачи стартового импульса на регистр последовательных приближений. Схема...
-
На відміну від традиційних лінійних ІП, що передбачають гасіння зайвої нестабілізованої напруги на прохідному лінійному елементі, імпульсні ІП...
-
Базовые понятия - Триггеры: общая характеристика
Триггер -- это запоминающий элемент с двумя (или более) устойчивыми состояниями, изменение которых происходит под действием входных сигналов и...
-
Измерители амплитудно-частотных характеристик (характериографы) - Оcновы радиоэлектроники
Применение характериографов позволяет заменить довольно длительный и трудоемкий процесс снятия по точкам амплитудно-частотных характеристик с помощью...
-
Вона відображає принцип роботи пристрою в самому загальному вигляді і дає наочне уявлення про послідовності взаємодії функціональних частин пристрою....
-
АНАЛІТИЧНИЙ ОГЛЯД - Електронний цифровий мілівольтметр постійного струму з світлодіодним дисплеєм
Найбільш зручними в експлуатації приладами для вимірювання напруги є цифрові вольтметри. Вони можуть вимірювати як постійні, так і змінні напруги. Клас...
-
ОПИСОВА ЧАСТИНА - Електронний цифровий мілівольтметр постійного струму з світлодіодним дисплеєм
Ремонт, наладка і регулювання будь-якого радіоелектронного пристрою неможливі без радіовимірювальних приладів, серед яких вольтметр, амперметр і омметр....
-
Входная и выходная характеристики транзистора с ОЭ несколько отличаются от характеристик транзистора с ОБ. Входной характеристикой транзистора,...
-
На IBM PC наиболее популярны редакторы Cool Edit Pro (Syntrillium) Sound Forge (Sonic Foundry), WaveLab (Steinberg) и системы многодорожечной записи SAW...
-
Цель курсовой работы - экономическое обоснование создания оптимальных условий плавания для работы судов (составов) на внутренних водных путях. Основная...
-
Термином оптимальный синтез определяют процесс построения устройства с заданными свойствами, оптимально учитывающий совокупность технико-экономических...
-
Два варианта такого устройства, соответствующие горизонтальному либо вертикальному расположению отрезка НВЛ в устройстве, показаны на рис. 2.24,а, б . С...
-
Основним обладнанням робітничого місця користувача комп'ютера є: ВДТ, клавіатура, робочий стіл, стілець ( крісло). Робоче місце з ВДТ повинно бути...
-
Итак, пробок можно избежать, а пропускную способность магистрали можно увеличить многократно за счет изменения пространственного расположения полос...
-
Коэффициент отражения в конце линии: В случае согласования линии связи R Н = Z и стало быть K R = 0! В зависимости от значения R Н и Z меняется знак...
-
Ремонт оптико-механічних приладів - Проектори: основні характеристики
Процес ремонту оптико-механічних приладів підрозділяється на п'ять етапів: визначення несправностей і підготовка замінних деталей, заміна або ремонт...
-
Сьогодні практично всі сучасні телекомунікаційні технології передбачають використання цифрових методів обробки й передачі інформації, побудову...
-
Устройство СИТОВ-1 предназначено для проверки технических характеристик тормоза грузовых вагонов после постройки или ремонта и используется в...
-
Порівняльна характеристика антен - Розразунок рупорно-параболічної антени
Для проектування антен СВЧ () необхідно розглянути різні їхні модифікації в даному діапазоні. Для таких антен пред'являються наступні основні вимоги: -...
-
Регулировочная характеристика СИФУ при косинусоидальном опорном напряжении определяется выражением . (7.1) При линейной пилообразной форме опорного...
ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА ВАРІАНТІВ РЕАЛІЗАЦІЇ ПРИЛАДІВ, ЗАБЕЗПЕЧУЮЧИХ ЗСУВ ФАЗИ - Цифровий прилад для повірки фазометрів