Динамика автомобиля на эластичных колесах, Силовой увод шины - Устойчивость и управляемость автомобиля
Силовой увод шины
Под воздействием боковой силы Fy беговая дорожка колеса деформируется - образуется угол наклона беговой дорожки б.
Если на вращающее колесо начнет действовать боковая сила, то вектор скорости колеса отклонится от первоначального на некий угол д - угол силового увода (угол между линией пересечения плоскости вращения колеса с дорогой и вектором скорости колеса):
Пояснение к схеме:
- ? т. А - Беговая дорожка только вошла в контакт с дорогой и пока не деформирована; ? т. В - середина контакта беговая дорожка деформирована на некоторую величину; ? ? т. С - конец зоны контакта - максимальная деформация беговой дорожки.
Увод колеса с эластичной шиной
Fy
д, рад (град)
Зависит от боковой силы:
1 зоначистогоувода-сила
Пропорциональна углу увода
- 2 зона увода со скольжением 3 зона чистого скольжения (занос): Fy = Fymax= Rz-цy
Вторая зона крайне не устойчивая, поэтому ею часто пренебрегают.
В зоне чистого увода вводят Коэффициент Сопротивления Уводу:
Пример: шина 6,45 - 13 КД = 36000 Н/рад.
При нормальных условиях (ведомый режим при паспортной (нормальной) вертикальной нагрузке) задают Кдн.
Только при отсутствии опытных данных Кдн допустимо определять (современные шины имеют значительно больший коэффициент сопротивления уводу, чем рассчитан по нижеследующим зависимостям):
- K--dН=--78_--Ч--Bk--Ч--(d--+--2Bk)--Ч (Pш ? 98) для радиальных шин; K--dН=--5__--Ч--Bk--Ч--(d--+--2Bk)--Ч--(pш--+--98) для диагональных шин,
Где Рш - Давление в шине, кПа; Вк - Ширина профиля шины, м; D -
Посадочный диаметр шины, м.
Коэффициент сопротивления уводу Кд зависит от:
- Ш конструкции шины (радиальная жестче диагональной); Ш давления в шине: с увеличением давления растет КД; Ш продольной реакции Rx:
K6--=--K6н--Ч--qx
Rх = 0,20 - Rх Max Ђ Кд = 0,979-Кд0 Rх = 0,40 - Rх Max Ђ Кд = 0,916-Кд0 Rх = 0,60 - Rх Max Ђ Кд = 0,800-Кд0 Rх = 0,80 - Rх Max Ђ Кд = 0,600-Кд0
Нормальной реакции R по Литвинову:
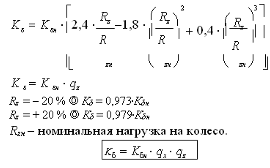
Rzн - Номинальная нагрузка на колесо.
Выводы:
Колесо в ведущем режиме имеет Кд меньше, чем в ведомом.
При номинальной вертикальной нагрузке колесо имеет максимальный коэффициент сопротивления уводу.
1. Коэффициент Сопротивления Уводу Оси В Целом Равен Сумме Коэффициентов Сопротивления Силовому Уводу Колес:
- силовой Увод Оси (только За Счет Эластичности шин).
2. Коэффициент Сопротивления Силовому Уводу Оси Всегда Уменьшается При Крене Кузова. Уменьшение Тем Существеннее, Чем Больше Угловая Жесткость Подвески.
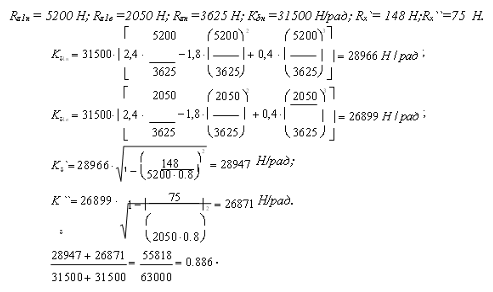
Пример: Автомобиль проходит поворот:
Коэффициент Сопротивления Силовому Уводу Двух Колес Уменьшается На 11,4 %. (и Это Всего-то В Ведомом Режиме!!! В Ведущем Или Тормозном Режиме Снижение КД Катастрофическое!!!)
Выводы:
- 1. Если Увод Передней Оси Больше Д1 > Д2, то Радиус Поворота Растет Rд > Rж. Такие Автомобили Называют Автомобилями С Недостаточной Поворачиваемостью. 2. Если Увод Осей Одинаков Д1 = Д2, то Радиус Поворота На Эластичных Колесах Равен Радиусу Поворота На Жестких: Rд = Rж. Такие Автомобили Называют Автомобилями С Нейтральной Поворачиваемостью. 3. Если Увод Передней Оси Меньше Д1 < Д2, то Радиус Поворота Уменьшается Rд < Rж. Такие Автомобили Называют Автомобилями С Избыточной Поворачиваемостью.
Поворачиваемость автомобиля сказывается не только в повороте, но и при прямолинейном движении, если есть воздействие боковой силы (ветер, склон):
Недостаточная поворачиваемость д1 > д2:
При воздействии боковой силы появляется центробежная сила, которая гасит возмущение. Автомобиль устойчив. Курс немного меняется, но коррекция рулем компенсирует это изменение. Автомобиль движется прямо, но передние колеса немного повернуты.
Нейтральная поворачиваемость д1 = д2:
Автомобиль боком "сползает" с дороги. Коррекция рулем легко компенсирует возмущение. Автомобиль движется "немного боком" к курсу.
Избыточная поворачиваемость д1 < д2:
При воздействии боковой силы появляется центробежная сила, которая Не Гасит возмущение. Автомобиль не устойчив. Курс меняется, коррекция рулем возможно (не всегда!!!) компенсирует это изменение. Автомобиль движется боком, передние колеса повернуты.
Вывод: Современный скоростной автомобиль при любой загрузке должен иметь Определенную недостаточную поворачиваемость.
Похожие статьи
-
Комплексная оценка управляемости автомобиля - Устойчивость и управляемость автомобиля
Коэффициент Недостаточной Поворачиваемости Увод оси определяется эквивалентным (т. е. суммарным, учитывающим все виды увода оси) коэффициентом...
-
(случай без продольных ускорений): Касательные реакции Допущения : при достижении предельной боковой силы сопротивление качению колес удваивается; рост...
-
Устойчивость и управляемость автомобиля - Ходовая часть автобуса Икарус
От характера работы подвески напрямую зависят такие характеристики автомобиля, как устойчивость, управляемость и плавность хода. Устойчивость...
-
Реальные автомобили имеют подвеску, поэтому более нагруженная (нижняя по склону) сторона проседает, а другая приподнимается. Это явление называется...
-
Управляемость автомобиля, Рулевая трапеция - Устойчивость и управляемость автомобиля
2.1 Общие сведения Управляемость - способность Автомобиля При Движении Точно Следовать Повороту Управляемых Колес. Существует 3 основных способа...
-
При построении графиков силового баланса для различных передач и скоростей движения автомобиля рассчитывают значения составляющих уравнения силового...
-
Занос одной из осей автомобиля - Устойчивость и управляемость автомобиля
Суммарная боковая сила, действующая на автомобиль, распределяется неравномерно по осям (зависит от развесовки). Поэтому на одной из осей может...
-
Уравнение силового баланса выглядит следующим образом: , Где - тяговое усилие, кН - сила сопротивления воздуха, кН; - сила сопротивления дороги, кН; -...
-
Силовой расчет рулевого управления - Проектирование рулевого управления VOLVO FMX
В общем случае усилие на рулевом колесе непостоянно и зависит от ряда причин: 1)нагрузки, приходящейся на передний мост; 2)типа дороги; 3)скорости...
-
Колеса, шины - Устройство и техническое обслуживание Мерседес 123
Для автомобиля MERSEDES 123 пригодны разные колеса и шины. Допустимы только диски колес с глубиной выдавки 30 мм посадочного диаметра 14" или35 мм с...
-
Разное давление воздуха в шинах Установите нормальное давление в шинах Нарушение углов установки колес Отрегулируйте углы установки колес Разрушение...
-
Согласно варианту 12 исходными данными для определения сил сопротивления движению автомобиля и мощностей на их преодоление являются: тип пожарного...
-
Характер деформирования крупногабаритных шин низкого давления движителей тракторов класса 5
Введение. Функции колесного движителя сельскохозяйственного трактора настолько многообразны, что выполнение их возможно лишь на основе комплекса...
-
Условие опрокидывания Rz' = 0. Сумма моментов относительно О'' должна быть равна нулю: Критическая по опрокидыванию скорость: Чтобы автомобиль не...
-
Устойчивость - способность Автомобиля Сохранять Заданную Скорость И Направление Движения, Ориентацию Продольной И Вертикальной Осей При Их Отклонении В...
-
Независимые подвески на двойных поперечных рычагах и с направляющими пружинными и амортизаторными стойками требуют мало места в поперечном направлении,...
-
Тормозные свойства пожарных автомобилей - Расчет машин для проведения аварийно-спасательных работ
Согласно варианту 12 задания исходными данными для определения сил сопротивления движению автомобиля и мощностей на их преодоление являются: Автомобиль...
-
Безопасный подъем автомобиля. - Ремонт коробки передач автомобиля на примере ВАЗ-2115
Для безопасного подъема автомобиля домкратом необходимо выполнить следующее. 1. Установите автомобиль на ровную твердую поверхность. 2. Перед подъемом...
-
При въезде автомобиля на тормозной стенд производится измерение массы оси, если имеется взвешивающее устройство; при его отсутствии масса оси может...
-
Введение - Эксплуатация бескамерных шин
Весьма давним желанием автомобилестроителей является замена двускатных колес со свойственными этим колесам неравномерным износом шин и большим...
-
Факторы, влияющие на срок службы автомобильных шин - Эксплуатация бескамерных шин
Шины являются дорогостоящим элементом автомобиля. Затраты на шины для легковых автомобилей составляют 6-10%, для грузовых автомобилей 11-18% от общих...
-
Второе условие. Мощности двигателя должно быть достаточно для обеспечения движения автогрейдера с максимальной транспортной скоростью VТ тах = 8,3...12,5...
-
ПОТРЕБИТЕЛЬНЫЕ СВОЙСТВА ЛЕГКОВЫХ АВТОМОБИЛЕЙ - Транспортные средства
Потребительные свойства автомобилей классифицируются на четыре группы: функциональные, эргономические, эстетические и надежность. Функциональные свойства...
-
Потребность в автомобильных шинах, шт. =4*15417,600/34000 =132,765*4*154,176*1,56/1000*100 Где -прейскурантная стоимость одного комплекта шин, руб; -...
-
Годовой объем работ по каждой операции в отдельности рассчитывают по формуле TГ =tnNКМр(чел/ч) ТГ=5,286*16,82*7000*0,5=311186,82 чел/ч Где t -...
-
Развитие автоиндустрии в последнее время подарило автолюбителям много новых систем, значительно повышающих полезные качества активной безопасности...
-
При заправке, автомобиль должен располагаться в горизонтальном положении. Если вам необходимо поднять переднюю часть, поднимите также и заднюю. 6....
-
Правильный выбор передаточного числа главной передачи iгп определяет необходимую величину динамического фактора автомобиля и пределы принятого...
-
Углы установки передних колес - Организация зоны технического обслуживания
Раз уж мы с вами начали говорить об устойчивости и управляемости автомобиля, то имеет смысл сразу разобраться и с углами установки передних колес, хотя...
-
Снятие и установка коробки передач ВАЗ-2115 - Ремонт коробки передач автомобиля на примере ВАЗ-2115
Снятие. Установите автомобиль на подъемник или смотровую канаву. Поднимите капот двигателя и зафиксируйте его в этом положении. Работы по снятию,...
-
Тяговой характеристикой автомобиля называется зависимость свободной силы тяги от скорости движения на различных передачах в заданных дорожных условиях....
-
Данное предприятие классифицируется, как таксомоторное автотранспортное предприятие, задачей которого является перевозка пассажиров на относительно не...
-
Работа автомобильных шин, Учет работы автомобильных шин - Эксплуатация бескамерных шин
Учет работы автомобильных шин Учет работы автомобильных шин не только предотвращает возможность злоупотреблений, но оказывает влияние на пробег...
-
S, м T, c Авт 1 Авт 2 400 32 25 1000 46,7 47,8 Вывод: Приемистость автомобиля - способность быстро увеличивать скорость движения. Оценочными параметрами...
-
Определение фактора обтекаемости В результате движения автомобиля в неподвижной воздушной среде, обтекания неподвижного автомобиля потоком движущегося...
-
Тягово-скоростные характеристики автомобиля - Расчет автомобиля Урал-4320
Тягово-скоростные характеристики, к которым относятся скорость движения, тяговые усилия на ведущих колесах и динамический фактор автомобиля, определяются...
-
При укрупненных расчетах площади зон хранения F X = f O A Cт К П = 16,252502,75 = 11171,88 м2 Где F O - площадь, занимаемая автомобилем в плане (по...
-
Принцип работы ходовой части, Силы, действующие на колесо - Ходовая часть автобуса Икарус
Подвеска автомобиля включается в работу при проезде неровностей дорожного покрытия, прохождении поворотов и совершении бокового маневра, а также разгоне...
-
Толщину стенки цистерны B , мм можно определить по следующей формуле: (16 Где Р Р - то же, что и в формуле (10); - внутренний диаметр цистерны, мм; - то...
-
В соответствии с заданием, в курсовой работе необходимо провести тягово-скоростной анализ автомобиля Volkswagen Passat при движении по дороге с суммарным...
Динамика автомобиля на эластичных колесах, Силовой увод шины - Устойчивость и управляемость автомобиля