Орбитальная система координат - Математическое моделирование движения небесных тел
Орбитальная система координат вводится следующим образом. Ось направим по вектору Лапласа ?, ось - по вектору c, а ось - перпендикулярно к этим осям и так, чтобы система была правой. Плоскость ?? в орбитальной системе координат является плоскостью орбиты.
Орты орбитальной системы
,
,
(1.10)
Полностью определяются компонентами векторов и :

. (1.11)
С помощью матрицы A направляющих косинусов осей орбитальной системы относительно системы
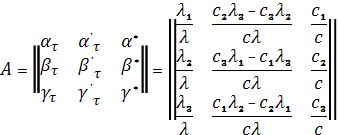
(1.12)
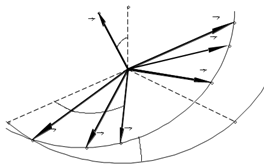
Рис. 1.2. Используемые ортонормированные базисы.
Можно выразить относительные координаты и скорости через орбитальные:
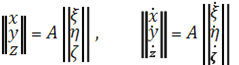
(1.13)
Обратный переход осуществляется с помощью транспонированной матрицы AT, совпадающей с обратной матрицей A?1:
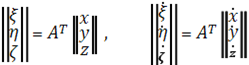
. (1.14)
Все элементы матрицы A - постоянные величины.
В орбитальной системе координат векторы, , и имеют следующие компоненты:
= {?, 0, 0}, ={0,0,c}, ={,?, }, = {, , }, (1.15)
Радиус-вектор и векторы скорости в радиальном r и трансверсальном направлении будем записывать в виде
, (1.16)
Где e и e! - единичные взаимно ортогональные векторы радиального и трансверсального направлений:
. (1.17)
Направляющие косинусы ?,?,?, являются переменными величинами. Верхний индекс (штрих) означает дифференцирование по угловой переменной u (или по v, учитывая, что u=v+? и ?=const), зависящей от времени, что согласуется с правилом дифференцирования единичных векторов.
Похожие статьи
-
Общее решение уравнений относительного движения - Математическое моделирование движения небесных тел
Рассмотрим на небесной сфере сферический треугольник N M x, где M - проекция текущего положения тела M на небесную сферу. Сторонами этого треугольника...
-
Орбиту можно получить как линию пересечения двух поверхностей. Уравнение одной поверхности - это уравнение плоскости орбиты. Уравнение второй поверхности...
-
Общее решение задачи двух тел можно получить из общего интеграла, представляющего собой не что иное, как неявную форму задания общего решения. Общее...
-
Кеплеровские элементы орбиты - Математическое моделирование движения небесных тел
Вместо произвольных постоянных c1,c2,c3,h,?1,?2,?3,? в астрономии обычно используются более наглядные и более удобные постоянные...
-
Лунная поверхность места посадки моделируется как плоскость и импортируется в формат STL как дискретизованная поверхность. Модель космического аппарата...
-
Круговое движение, Эллиптическое движение - Математическое моделирование движения небесных тел
(p = 0, e = 0) Круговое движение представляет собой наиболее простой случай движения в задаче двух тел. Только для кругового движения (и прямолинейного...
-
Параболическое движение, Прямолинейное движение - Математическое моделирование движения небесных тел
(p = 0, e = 1) Уравнение параболической орбиты записывают в видеp r = 1 + cos v (1.80) Где величина определяет расстояние от центра притяжения M0 до...
-
Гиперболическое движение - Математическое моделирование движения небесных тел
(p=0,e>1) Каноническое уравнение гиперболы в центральных прямоугольных координатах O?!?! представляется в виде (1.68) Где a - действительная, а b...
-
Уравнение Бине - Математическое моделирование движения небесных тел
Другой способ получения траектории движения в задаче двух тел связан с широко известным уравнением Бине. Это уравнение записывается в цилиндрической...
-
Эклиптическая система координат - Общие сведения о небесных сферах
Эклиптическая система координат, или эклиптикальные координаты -- это система небесных координат, в которой основной плоскостью является плоскость...
-
Закон Всемирного тяготения - Законы движения небесных тел и строение Солнечной системы
Законы Кеплера прекрасно описывали наблюдаемое движение планет, но не вскрывали причин, приводящих к такому движению (напр. вполне можно было считать,...
-
Результаты проведенного интегрирования позволяют Сформулировать два первых обобщенных закона Кеплера. Первый закон: невозмущенной орбитой является кривая...
-
Строение Солнечной системы - Законы движения небесных тел и строение Солнечной системы
Хорошо известно, что основная масса Солнечной системы (около 99.8%) приходится на ее единственную звезду - Солнце. Суммарная масса планет составляет...
-
Введение - Математическое моделирование движения небесных тел
В небесной механике для описания движений небесных тел в зависимости от конкретных условий используются различные физические модели - идеализированные...
-
Экваториальная система координат Система координат, в которой отсчет производится от плоскости экватора, называется экваториальной. Угловое расстояние...
-
Математическая модель Для описания движения КА по ограниченной орбите введем вращающуюся систему координат, связанную с точкой L2. Центр системы...
-
Для решения системы линейных уравнений (4.18) воспользуемся итерационным методом Гаусса-Зейделя. Перепишем (4.18) в матричном виде: (4.14) Матрица А...
-
Двумя наиболее значительными успехами классического естествознания, основанного на механике Ньютона, были практически исчерпывающее описание наблюдаемого...
-
Заключение - Математическое моделирование движения небесных тел
Небесная механика на протяжении всей истории ее становления была источником новых идей, методов и даже новых направлений в математике, традиционно...
-
Математическая модель Для описания движения КА по ограниченной орбите введем вращающуюся систему координат, связанную с точкой L2. Центр системы...
-
Комета Шумейкеров -- Леви След от одного из обломков кометы Шумейкеров-Леви, снимок с телескопа "Хаббл", июль 199 г. 12 Основная статья: Комета...
-
I. Определить по звездной карте экваториальные координаты следующих звезд: 1. б Большой Медведицы, 2. г Ориона, 3. в Кита. Ответ. 1) б =11 ч, д =+620;...
-
Направление неустойчивости является направлением, исполнение импульса в котором наиболее эффективно. На основе методики, изложенной в разделе 4, был...
-
Блок-схема, представленная на Рис.2. 2 в предыдущем разделе, подходит для описания алгоритма подбора величины импульса. Как было замечено ранее, чтобы...
-
Солнечная система. - Небесные тела
Солнце, большие и малые планеты, кометы и другие небесные тела, которые вращаются вокруг Солнца, составляют Солнечную систему. Один оборот планеты вокруг...
-
Сравнивая дуги, на которые перемещаются планеты за равные промежутки времени, установить, какая из планет быстрее движется на звездном небе, и объяснить...
-
Введение, Движение луны - Характеристика Луны как небесного тела
ЛУНА, единственный естественный спутник Земли и ближайшее к нам небесное тело; среднее расстояние до Луны - 384000 километров. Движение луны Луна...
-
Исследование зависимости энергетики поддержания гало-орбиты от места и направления исполнения импульса Суммарный импульс, затрачиваемый на коррекции для...
-
Солнце., Движение солнечной системы - Измерение количественных и качественных характеристик звезд
Солнце ближе к нам, чем другие звезды, поэтому его можно изучить особенно подробно, и сравнивать характеристики других звезд уже с характеристиками...
-
Математическое описание модели Прямое солнечное излучение на модели КА рассчитывается аналогичным образом как для поверхности Луны, т. е. делая допущения...
-
Орбиты, для которых были рассчитаны направления неустойчивости в предыдущем разделе, лежат в плоскости эклиптики (плоскости XY). Однако также необходимо...
-
Отсутствуют ощутимые в обычных (земных) условиях гравитационные силы, которые действуют перпендикулярно (нормально) к средней плоскости движения планет....
-
Рассмотрим, наконец, общую схему вычисления возмущенных координат спутника. Элементы орбиты. Примем за основную систему произвольных постоянных теории...
-
Введение Помимо несферичности Земли, притяжения Луны и Солнца, сопротивления атмосферы и светового давления на движение спутника действует целый ряд...
-
Работы над многоразовым орбитальным кораблем были начаты в 1974 году в рамках подготовки "Комплексной программы НПО "Энергия". Это направление работ было...
-
Графическое отображение связи горизонтной и экваториальной систем координат
Графическое отображение связи горизонтной и экваториальной систем координат Совмещение на одном чертеже горизонтной и экваториальной систем и мест...
-
Математическая модель В данной работе, для описания движения КА, была использована вращающаяся система координат с фиксированным направлением...
-
Рис. 33 Иллюстрирует эволюцию максимального отклонения от номинальной траектории при изменении начального положения аппарата. На рисунке представлены...
-
Направление неустойчивости является направлением, исполнение импульса в котором наиболее эффективно. На основе методики, изложенной в разделе 4, был...
-
Уравнения движения МКА Рассмотрим невозмущенное движение материальных точек М и m в некоторой инерциальной системе координат. Движение совершается под...
Орбитальная система координат - Математическое моделирование движения небесных тел