АВТОМАТИЗАЦИЯ ПРОЦЕССА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МАШИНЫ - Комплексная механизация работ по возведению земляного полотна железной дороги
При нарезке сливной призмы с необходимой точностью и при наличии не только поперечного, но и продольного уклона планируемых поверхностей автогрейдер должен совершать многочисленные рабочие проходы, связанные с трудоемкими разбивками. При этом не во всех местах удается достичь требуемого качества планировки и поэтому приходиться выполнять зачистку вручную.
Точность планировочных работ повышается с применением автоматических систем управления. Системой "Профиль-2" оборудуются автогрейдеры с гидравлическим управлением отвала (рисунок 13, взятый из [6]).
Система автоматики [6] удерживает отвал независимо от движения колес машины по неровной поверхности в таком положении, чтобы режущая кромка отвала находилась на заданной высоте по отношению к поверхности основной площадки земляного полотна, а в поперечной плоскости - под тем же углом к горизонтали, под которым будет находиться поверхность будущего полотна.
Положение отвала 11 по высоте задается копирной проволокой 9, которая устанавливается на стойках 10, вбитых в землю через 10 - 15 метров.
По проволоке, натянутой полиспастом, скользит щуп датчика 6. Угловое положение отвала в поперечной плоскости контролируется маятниковым датчиком 5.
По датчикам сравнивается действительное положение отвала автогрейдера с требуемым для поддержания заданных продольного и поперечного профилей. Если угловое положение щупа датчика 6 превысит размер зоны нечувствительности, датчик выдаст сигнал, который поступает в усилитель блока управления 2, а затем на один из электромагнитов гидрозолотника.
Правый гидроцилиндр перемещает отвал до тех пор, пока щуп датчика, скользя по опорной базе, не возвратиться в зону нечувствительности.
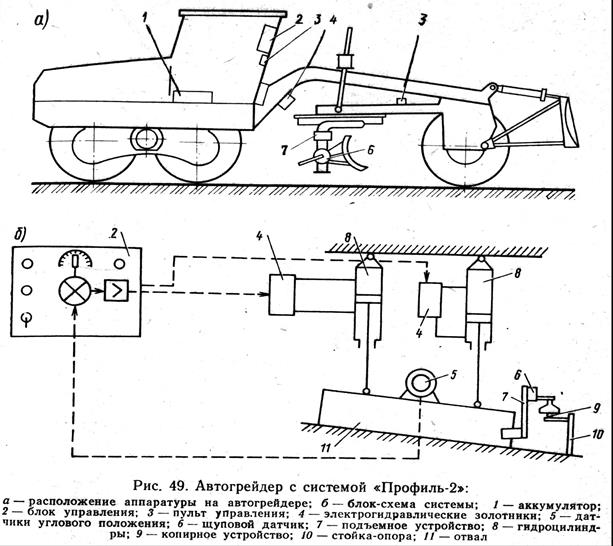
Рисунок 13. - Блок-схема системы "Профиль-2" [6]
Требуемое значение стабилизации положения отвала в поперечном положении задается датчиком углового положения, смонтированным на блоке управления 2. Сигнал датчика угла 5 сравнивается с сигналом задатчика углового положения по мостовой схеме. При рассогласовании сигналов включается электромагнит реверсионного золотника, и левый гидроцилиндр перемещает отвал в сторону уменьшения рассогласования до углового положения, определяемого задатчиком.
Производительность комплекта при устройстве сливной призмы автогрейдером с автоматическим управлением повышается на 30 - 40 %, а выработка на одного рабочего - в 2,5 ... 3 раза
Похожие статьи
-
ВЫВОДЫ - Комплексная механизация работ по возведению земляного полотна железной дороги
На основании заданных в ТЗ исходных данных проведен анализ и подготовка продольного профиля № 10 трехкилометрового участка железной дороги. В результате...
-
Определение основных объемов земляных работ Объемы земляного полотна зависит от типа поперечного профиля и величины рабочих отметок на прямых и кривых...
-
Подготовка продольного профиля участка железнодорожной линии заключается в делении его на части, имеющие однотипные поперечные профили земляного полотна...
-
Определение рабочей кубатуры После распределения земляных масс и разделения всего участка железной дороги на рабочие участки, определяем рабочую кубатуру...
-
ВВЕДЕНИЕ - Комплексная механизация работ по возведению земляного полотна железной дороги
Результативность любой отрасли и экономики страны в целом предопределяется множеством факторов, особенно состоянием производственных сил, основу которых...
-
Растительный и плодородный слой толщиной не менее 0,2 м снимаем на площади, ограниченной размерами основания насыпи или шириной верха выемки, а также...
-
Выбор вариантов комплектов машин Для каждого рабочего участка выбираем свой землеройный комплект, исходя из рабочих отметок и дальности возки. При этом...
-
Определение границ участков На основании ведомости попикетных основных объемов в таблице 1, на листе формата А1 под продольным профилем строим - график...
-
Загрязнение воды происходит за счет сброса в водоемы сточных вод, которые образуются при обмывке путевых машин и агрегатов, при очистке деталей...
-
При назначении транспортной схемы распределения земляных масс следует стремиться к минимальному использованию резервов и устройству кавальеров, т. е. к...
-
Каждый вновь поступивший, рабочий должен пройти инструктаж по технике безопасности на рабочем месте и в течение 10-ти смен пройти обучение по безопасным...
-
Дальнейшие подробные расчеты производим только для VII-го участка с двумя возможными вариантами комплексной механизации: - экскаваторно-транспортный...
-
В состав дополнительных объемов работ входят: - объемы, образующиеся за счет косогорности участка; - объемы, вызванные уширением земляного полотна; -...
-
При проектировании земляного полотна учитывают категорию автомобильной дороги, а также физико-географические условия местности. На участках с...
-
В состав скреперного комплекта входят [2, 6]: - скрепер самоходный (ведущая машина); - бульдозер для подготовки фронта работ скреперу; - трактор-толкач с...
-
На подходах к мосту основную площадку земляного полотна ( B ) уширяем на 0,5 м в каждую сторону на протяжении 10 м от задней грани устоев, на последующих...
-
Работы подготовительного периода предшествуют началу возведения насыпи или выемки на конкретном участке работ. Их состав: - геодезическая подготовка...
-
Удельные капиталовложения рассчитываем по [3] формуле: К УД = ?К / П Э , (37) Где ?К - сумма расчетно-балансовой стоимости комплекта машин....
-
Наилучший вариант комплекта землеройных машин выбираем путем сравнения технико-экономических показателей по каждому варианту. В качестве обобщающего...
-
Расчет годовой эксплуатационной производительности комплекта машин производим по [3] формуле: = П Ч - T См - К В - N В - T Г , (34) Где П Ч - часовая...
-
Краткая характеристика участка работ Прокладываемая трасса имеет протяженность - 3 км (с 21 км по 24 км или с ПК 810 по ПК 840). Большая часть трассы...
-
По данным ведомости откорректированных объемов построена диаграммы земляных работ (график пикетных объемов ). Объемы выемок и насыпей изображают в виде...
-
При составлении рабочих чертежей и сметы, различают три вида объемов земляных работ: - профильный - объемы отсеков земляного полотна, подсчитанные по...
-
Земляные работы, выполняемые при строительстве автомобильных дорог, как правило, не однородны по длине строящейся дороги. Объемы земляных работ...
-
Согласно заданным категории дороги, району строительства, характеристикам грунтов, данным справочной и нормативной литературы [5, 7, 12] назначается...
-
Проектируем характерные поперечные профили земляного полотна. Конструкция поперечного профиля выбирается по типовому проекту (8) в следующей...
-
При производстве земляных работ необходимо руководствоваться СНиП III-04-80 "Техника безопасности в строительстве". При работе с землеройными машинами...
-
Объемы земляных работ в дорожном строительстве определяют по рабочим отметкам продольного профиля с учетом размеров и формы земляного полотна. Все...
-
Проектирование продольного профиля Продольный профиль запроектирован в соответствии с требованиями СНиП 2.05.02-85 Проектная линия нанесена по методу...
-
Земляное полотно Одним из важнейших элементов является земляное полотно (рис. 2), которое служит основанием для наиболее дорогостоящей проезжей части, по...
-
Календарный график - один из основных документов организации строительства и производства работ. В нем устанавливается технологическая последовательность...
-
Технико-экономическая оценка вариантов возведения земляного полотна специализированными отрядами дорожных машин С учетом конструкции земляного полотна,...
-
Способы управления работой насосной станции. - Назначение и виды насосных станций
Тема использования регулируемого электропривода насосных станций в системах коммунального и промышленного водоснабжения в последнее время является...
-
Технологическую схему потока составляют и вычерчивают для каждого специализированного потока как сумму последовательно работающих частных потоков. Для...
-
В соответствии с указаниями строительных норм и правил [11] до начала основных земляных работ на участке строительства должны быть выполнены...
-
ВИДЫ КОМПЛЕКТОВ МАШИН ДЛЯ ОСНОВНЫХ ЗЕМЛЯНЫХ РАБОТ При комплексной механизации строительства работы выполняют специально подобранными комплектами...
-
Расчет поправок на уширение земляного полотна в кривых участках пути В кривых участках пути земляное полотно уширяется в наружную сторону на величину...
-
Общее положения На предварительном этапе выбора способа производства работ решаются основные вопросы, определяющие состав и объем работ, технологическую...
-
Схема работ, при которых грунт из выемок перемещается в насыпи (вдоль трассы земляного полотна), получила название продольной возки. Если насыпи...
-
Введение, Подготовка исходных данных - Расчет объемов земляного полотна железной дороги
Сооружения земляного полотна является наиболее важной частью комплекса работ по строительству железной дороги. Это обусловлено многими факторами,...
АВТОМАТИЗАЦИЯ ПРОЦЕССА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МАШИНЫ - Комплексная механизация работ по возведению земляного полотна железной дороги