Основные сведения о частотно-регулируемом электроприводе - Частотный преобразователь
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей - сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.
Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации.
Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту F1 питающего напряжения, можно в соответствии с выражением

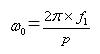
Неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.
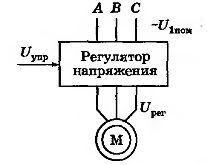
Для получения высоких энергетических показателей асинхронного двигателя - коэффициентов мощности, полезного действия, перегрузочной способности - необходимо одновременно с частотой изменять и подводимое напряжение.
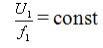
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const Напряжение на статоре должно регулироваться пропорционально частоте:
Для вентиляторного характера момента нагрузки это состояние имеет вид:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Похожие статьи
-
Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением...
-
Принцип работы частотного преобразователя. Схема частотного привода - Частотный преобразователь
Переити в каталог продукции: Частотные преобразователи Электроприводы постоянного тока являются очень простыми с точки зрения организации системы...
-
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения,...
-
Основные достоинства применения регулируемых приводов на предприятиях - Частотный преобразователь
Интеграция систем регулирования качественно изменяет технические характеристики всех участников технологического процесса, нуждающегося в регуляции....
-
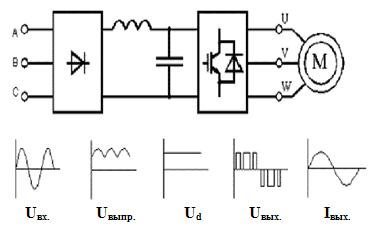
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного...
-
Принципиальной задачей преобразователя частоты является изменение параметров электрического тока, это осуществляется при помощи транзисторного...
-
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором. Из...
-
Оценим величину экономического эффекта от применения преобразователя частоты Lenze SMD ESMD223L4TXA (цена со склада в Петербурге 37 000 р. с НДС) на...
-
Несмотря на кажущуюся значительную стоимость современных преобразователей, окупаемость вложенных средств за счет экономии энергоресурсов и других...
-
Цель предложения - Частотный преобразователь
Экономия материальных средств и снижение энергозатрат в коммунальном хозяйстве. Регулирование режимов работы электродвигателей позволит: - обеспечить...
-
С целью реализации программы энерго - и ресурсосбережения предлагается установить частотные преобразователи для регулируемых электроприводов на основе...
-
В воздушном зазоре электрических машин всегда, наряду с основной гармонической составляющей вращающегося магнитного поля, присутствуют гармонические...
-
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия...
-
Технико - экономическое обоснование - Частотный преобразователь
При определении экономической эффективности применения частотного преобразователя на объектах учитываются следующие факторы: А) экономия электроэнергии...
-
В результате первой стадии статистического исследования (статистического наблюдения) получают статистическую информацию, представляющую собой большое...
-
Растворы - термодинамические устойчивые системы переменного состава, состоят не менее чем из двух компонентов и продуктов их взаимодействия. Это...
-
Главным параметром трансформатора является его мощность. Различают электромагнитную, полезную, расчетную и типовую мощности трансформатора....
-
Провести комплексное исследование численных методов для задачи решения нелинейных уравнений. 1. Решить нелинейные уравнения А) ; Б) ; В) . 2....
-
Роль серебра в культурных традициях различных народов Серебро известно человечеству с древнейших времен. Это связано с тем, что в свое время серебро,...
-
Основные сведения о строении вещества - Строение вещества
Слово "атом" -- греческого происхождения, и переводится оно "неделимый". Принято считать, что первым идею о том, что кажущаяся гладкой и непрерывной...
-
Выбор средств контроля и регулирования зависит от условий технологического режима. При выборе средств контроля и регулирования руководствуются следующими...
-
ТЕМПЕРАТУРА - Основные положения молекулярно-кинетической теории, ее опытные обоснования
Любое макроскопическое тело или группа макроскопических тел называется термодинамической системой. Тепловое или термодинамическое равновесие - такое...
-
Технологический процесс изготовле-ния бумаги (картона) включает следующие основные операции: Аккумулирование бумажной массы; разбавление ее водой до...
-
Основные уравнения, движущая сила процесса - Процесс фильтрования
Фильтрование протекает в ламинарной области, что означает небольшой размер пор в слое осадка и фильтровальной перегородке, а также малую скорость...
-
Модель в общем смысле (обобщенная модель) есть создаваемый с целью получения и (или) хранения информации специфический объект (в форме мысленного образа,...
-
Опис-ся правиломВант-Гоффа: С увелич-ем темп. на каждые 10 градусов. Скор. больш-ва хим. р-ций увелич-ся в 2-4 раза. Где г-темп. коэф-т скорости хим....
-
Способы определения моментов исполнительных двигателей - Электромеханические преобразователи
Момент вращения, действующий в электрической машине в процессе преобразования энергии, может быть определен как отношение электрической мощности к...
-
Сходящиеся последовательности, Основные свойства сходящихся последовательностей: - Свойства функций
Говорят, что Последовательность сходится, если существует число такое, что для любого существует такое , что для любого , выполняется неравенство: ....
-
NаСl + NН4НСО3 NаНСО3 + NН4Сl Равновесие которой почти нацело смещено вправо (вследствии очень малой растворимости NаНСО3 в растворе NН4Сl)....
-
Теоретические основы масс-спектрометрии Масс-спектрометрия представляет собой метод исследования веществ, основанный на определении массы (точнее,...
-
Задачей данного раздела курсового проекта является определение потоков мощности по линиям выбранного варианта электрической сети и напряжений на шинах...
-
Электротехника и ювелирное дело Так как обладает наибольшей электропроводностью, теплопроводностью и стойкостью к окислению кислородом при обычных...
-
Исследования, проводимые в последние годы, указывают на перспективность использования систем, для которых характерна фотоинициируемая валентная...
-
ПРОИЗВЕДЕНИЕ РАСТВОРИМОСТИ - Характеристика основных видов растворов
В насыщенном растворе малорастворимого сильного электролита устанав-ливается равновесие между твердой фазой (осадком) и ионами электролита: ВaSO4 (в...
-
СЛАБЫЕ ЭЛЕКТРОЛИТЫ - Характеристика основных видов растворов
При растворении в воде слабого электролита устанавливается динамическое равновесие между недиссоциированными молекулами и продуктами их диссоциации -...
-
Пластичными массами называют материалы, полученные на основе полимеров, содержащие различные добавки и способные под влиянием температуры и давления,...
-
Физиологическое действие - Серебро: основные свойства и роль в мировой культуре
Обычно серебро поступает в организм с водой и пищей в ничтожно малых количествах -- всего 7 микрограммов в сутки. И при этом такое явление, как дефицит...
-
Задача Джонсона о двух станках Рассмотрим задачу последовательной обработки на двух машинах N различных деталей, если известно время Ai и Bi обработки...
-
Выбор вариантов схем соединения источника питания и пунктов потребления между собой Рассмотрим несколько вариантов развития распределительной сети:...
-
Сущность и основные условия применения корреляционного анализа В соответствии с сущностью корреляционной связи ее изучение имеет две цели: 1) измерение...
Основные сведения о частотно-регулируемом электроприводе - Частотный преобразователь