Нелинейное программирование - Реферативно-прикладное исследование применения экономико-математических методов в решении задач производства (метод нелинейного программирования)
Это раздел математического программирования, изучающий методы решения таких экстремальных задач, в которых результаты (эффективность) возрастают или убывают не пропорционально изменению масштабов использования ресурсов (или, что то же самое, масштабов производства) из-за деления издержек производства на предприятиях на переменные и условно-постоянные, из-за насыщения спроса на товары, когда каждую следующую единицу продать труднее, чем предыдущую, из-за влияния внешней экономики, внешних издержек и т. д.
Как известно, общая задача математического программирования формулируется следующим образом: найти вектор X = (X1, x2, ..., xN), удовлетворяющий системе ограничений
GI (X1, x2, ..., xN) = BI , i=1,2, ...,k,
(1) GI (X1, x2, ..., xN) ? BI , i=k+1,k+2, ...,m
И доставляющий экстремум функции
(2) Z=f (X1, x2, ..., xN)
При этом предполагается, что известны функции GI (X1, x2, ..., xN) и F (X1, x2, ..., xN) . Обычно на некоторые переменные X1, x2, ..., xN Накладывается условие неотрицательности. Кроме того, ограничением может служить условие целочисленности решения для ряда переменных. Если

GI (X1, x2, ..., xN) = , i=1,2,...,m,
И

Z=f (x1, x2, ..., xN)=,
Где AIj И СJ - известные константы, то при условии неотрицательности решения получаем задачу линейного программирования. Любую другую задачу математического программирования, не удовлетворяющую условиям (1) и (2) ,будет считаться нелинейной.
Класс задач нелинейного программирования значительно шире класса задач линейного программирования. Основные результаты в нелинейном программировании получены при рассмотрении задач, в которых система ограничений линейная, а целевая функция нелинейная. Даже в таких задачах оптимальное решение может быть найдено только для узкого класса целевых функций. Рассмотрим частные случаи, когда целевая функция сепарабельная или квадратичная.
Если в задачах линейного программирования точки экстремума являются вершинами многогранников решений, то, как следует из рассмотренных ниже примеров, в задачах с нелинейной целевой функцией они могут лежать внутри области, на ребре (грани) или в вершине многогранника. Таким образом, с помощью методов линейного программирования, позволяющих осуществить переход из одной вершины многогранника в другую, можно получить оптимальное решение нелинейных задач при условии, что целевая функция удовлетворяет добавочным ограничениям.
Рассмотрение задач нелинейного программирования начинают с классической задачи оптимизации. Задачи такого рода имеют место, если система (2.1) содержит только уравнения, отсутствуют условия неотрицательности и целочисленности переменных, а функции GI (X1, x2, ..., xN) и F (x1, x2, ..., xN) Непрерывны и имеют частные производные не ниже второго порядка. Классические методы оптимизации при этом являются теоретическим аппаратом, позволяющим в ряде случаев обосновать разработку соответствующего вычислительного метода.

РИС 8
Рассмотрим примеры решения задач нелинейного программирования с двумя переменными. Так же как и в линейном программировании, они могут быть решены графически.
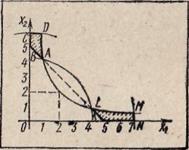
Пример 1. Найти минимальное и максимальное значения сепарабельной функции Z = (X1 -- 4)2 - f - (Х2 -- 6)2 при ограничениях
Х1+х2?1, Х1?0, Х2?0.
2х1+3х2?12,
Решение. Область допустимых решений представляет собой много - угольник АВСЕ (рис. 2.1). Если положить Z = Q (Q > 0), то получим уравнение окружности (х1 -- 4)2 + (х2 -- б)2 = Q. С уменьшением (увеличением) Q (квадрата радиуса) значения функции Z соответственно уменьшаются (увеличиваются).
Проводя из точки М Как из центра окружности различных радиусов, получаем: минимальное значение функция Z (D) = 196/13 принимает в точке D (24/13; 36/13), в которой окружность касается области решений. Точка D не является угловой, ее координаты находят в результате решения системы уравнений, соответствующих прямым MD И СЕ.
Функция Z имеет два локальных максимума: А (1;0) функция Z (А) = 45, в вершине Е (6; 0) функция Z (Е) =40. Так как Z(A)>Z(Е) То вершина А -- точка глобального максимума.
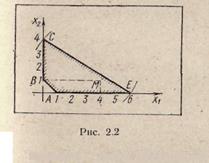
Пример 2. Пусть область допустимых решений останется прежней, a Z = = (x1 -- 4)2 + (х2 -- 1)2 . Найти минимальное и максимальное значения этой функции.
Решение. Минимальное значение функция принимает в точке М (4; 1) (рис. 2.2): Z (М) = 0. Функция Z Имеет два локальных максимума: в вершине Е (6; 0) функция Z (Е) = 5, в вершине С (0; 4) функция Z (С) = 25, причем глобальный максимум достигается в вершине С.
Пример 3. Найти минимальное и максимальное "рачения функции Z = при ограничениях
х1 * х2?4,
х1+ х2?5,
х1 ? 7, Х1 ?0, Х2?0.
х2?6,
Решение. В этом случае (рис. 2.3) область допустимых решений не является выпуклой и состоит из двух отдельных частей. Минимальное значение Функции Z = 17 достигается в точках А (1; 4) и L (4; 1). Функция Z Имеет два локальных максимума: в точке D (2/3; 6) функция Z (D) = 328/9 и в точке М (7; 4/7) функция Z (М) = 2417/49. Точка М Является точкой глобального максимума.
Похожие статьи
-
Некоторые особенности решения задач нелинейного программирования - Экономико-математические методы
Для решения ЗНП существенно знать: 1) выпукло или не выпукло множество допустимых решений задачи; 2) является ли целевая функция выпуклой или вогнутой...
-
Математическая модель задачи нелинейного программирования (ЗНП) (*) Для ЗНП в отличие от Задачи Линейного Программирования (ЗЛП) нет единого метода...
-
Исходная задача: При ограничениях: Двойственной является следующая задача: При ограничениях: Число неизвестных в двойственной задаче равно 2....
-
Модели линейного программирования. Основные определения Еще одним классом задач экономико-математического моделирования являются задачи линейного...
-
Так как целевая функция не является линейной, то эта задача является задачей нелинейного программирования. Найдем ее решение, используя геометрическую...
-
Необходимо найти минимальное значение целевой функции F = 4x1+18x2 > min, при системе ограничений: X1+4x2?14(1) X1+6x2?15(2) X1+x2?5(3)...
-
Во многих экономических моделях исследования операций зависимости между постоянными и переменными факторами лишь в первом приближении можно считать...
-
При решении экономических задач часто анализировать ситуации, в которых сталкиваются интересы двух или более конкурирующих сторон, преследующих различные...
-
Общая постановка задачи исследования операций - Экономико-математические методы
Все факторы, входящие в описание операции, можно разделить на две группы: Постоянные факторы (условия проведения операции), на которые мы влиять не...
-
В разделе 1 курсовой работы требуется: Определить количество закупаемого заданным филиалом фирмы сырья у каждого АО, (xj), максимизируя прибыль филиала....
-
Для достижения поставленной цели предприятию требуются материалы, оборудование, энергия, рабочая сила и другие ресурсы. Каждое предприятие такими...
-
Динамическое программирование Динамическое программирование -- один из разделов оптимального программирования, в котором процесс принятия решения и...
-
Решение задачи графическим методом - Математическое моделирование в менеджменте и маркетинге
Необходимо найти максимальное значение целевой функции L(x)= 2x1+2x2 > max, при системе ограничений: 6x1+8x2?48, (1) 8x1+11x2?88, (2)...
-
Постановка задачи применительно для КУП "СПЕЦКОММУНТРАНС": двум погрузчикам разной мощности, это автомобили ТО 28 и ТО 49, за 23 часа нужно погрузить на...
-
Необходимость введения нового ограничения может возникнуть, например, когда первоначально для сокращения затрат машинного времени некоторые интуитивно...
-
Основные понятия и обозначения Динамическое программирование как самостоятельная дисциплина сформировалась в пятидесятых годах двадцатого века. Большой...
-
Линейное программирование, Общая задача линейного программирования - Экономико-математические методы
Термин "линейное программирование" впервые появился в 1951 г. в работах американских ученых (Дж. Данциг, Т. Купманс), а первые исследования по линейному...
-
Как известно решение задач симплексным методом применяется очень часто. Это связано с тем, что симплексный метод подходит для решения широкого круга...
-
Экономико-математические методы и моделирование в землеустройстве позволяют решать большой круг задач, связанных с оптимизацией территориальной...
-
Теория игр исследует оптимальные стратегии в ситуациях игрового характера. К ним относятся ситуации, связанные с выбором наивыгоднейших производственных...
-
В начале пятилетнего периода работы предприятию выделена сумма в C руб. для приобретения нового оборудования. Стоимость одного комплекта оборудования...
-
Основные понятия теории экономико-математического моделирования Кибернетический подход к исследованию экономико-математических систем Обычно...
-
Известно оптимальное решение X*=(0;0;1;1) задачи линейного программирования: Составьте двойственную задачу и найдите ее оптимальное решение по теореме...
-
Планиметрические задачи Задача 1.Написать уравнения касательной и нормали к графику функциив данной точке, если: [3]. Решение. Уравнение касательной...
-
Оптимальное решение модели. - Методика решения задачи целочисленного программирования
Рис. 1 Шаг 1. Исходную задачу 1 заносим в дерево задач. В качестве исходного допустимого решения берем: x1=x2=x3=0. Соответствующее значение целевой...
-
Изучение теоретических вопросов анализа чувствительности оптимального решения ЗЛП к вариациям некоторых параметров задачи и введению нового ограничения....
-
Введение - Решение оптимизационных экономических задач методами линейного программирования
Линейное программирование является составной частью раздела математики, который изучает методы нахождения условного экстремума функции многих переменных...
-
Исследуем на экстремум функцию: 1. С помощью необходимого существования экстремума, т. е. из системы Найдем координаты стационарных (критических) точек:...
-
Ограничение чувствительность задача программирование Вариации правых частей ограничений приводят к изменению области допустимых решений ЗЛП, в действии...
-
Важным этапом изучения явлений предметов процессов является их классификация, выступающая как система соподчиненных классов объектов, используемая как...
-
Решим прямую задачу линейного программирования симплексным методом, с использованием симплексной таблицы. Определим максимальное значение целевой...
-
Наиболее ранним способом формализации экономико-математических и ТС является представление физических явлений с помощью систем дифференциальных...
-
Вариации коэффициентов целевой функции ЗЛП приводят к изменению направления вектора градиента. Так как при этом не затрагивается допустимое множество, то...
-
Задачей линейного программирования (ЛП) называется задача минимизации или максимизации линейного функционала при линейных ограничениях. В литературе...
-
Задача о загрузке рюкзака (задача о ранце) - Метод динамического программирования для решения задач
Постановка задачи. Пусть имеются N видов грузов с номерами. Единица груза j-го вида имеет все aJ. Если груз j-го вида берется в количестве xJ, то его...
-
Из перечисленного обзора типов ММ, составляющих предмет ИСО, можно выделить следующие особенности ММ ИСО [3]. - Системный подход, заставляющий...
-
Системы массового обслуживания -- это такие системы, в которые в случайные моменты времени поступают заявки на обслуживание, при этом поступившие заявки...
-
Иногда необходимо управлять сложными комплексами взаимосвязанных работ, направленных на достижение определенных целей. Примерами таких комплексов в...
-
Большое число экономических и планово-производственных задач связано с распределением каких-либо, как правило, ограниченных ресурсов (сырья, рабочей...
-
Области применения линейного программирования - Оптимальное программирование
Особенно широкое применение методы и модели линейного программирования получили при решении задач экономии ресурсов (выбор ресурсосберегающих технологий,...
Нелинейное программирование - Реферативно-прикладное исследование применения экономико-математических методов в решении задач производства (метод нелинейного программирования)