Математическое моделирование процесса запаздывания нарастания мощности автономного источника энергии от мощности потребителя
Математическое моделирование процесса запаздывания нарастания мощности автономного источника энергии от мощности потребителя
Сегодня существует вероятность запаздывания скорости нарастания мощности, вырабатываемой дизельгенератором, от скорости нарастания мощности, потребляемой преобразователем частоты на автономных объектах. Представленная проблема является особенно актуальной в системах с электродвижением (рисунок 1) на судах различного типа, а именно на судах ледового класса, буксирных и паромных судах, а также на судах технического флота. К системам с таким типом электродвижения [1] относятся системы электродвижения судов, для которых характерны высокие требования по маневренным возможностям, свободная компоновка оборудования привода гребного вала и/или установка длинного валопровода экономически не целесообразна.
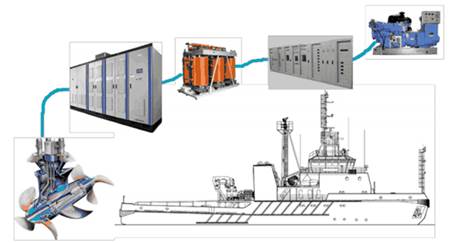
Рисунок 1 Схема судна с системой электродвижения
Система электродвижения судна может получать электропитание двумя способами - от отдельной энергетической установки или быть включеной в общесудовую систему энергоснабжения. Развитие полупроводниковой техники позволило конструировать суда с единой энергосистемой, которая обеспечивает питание всех потребителей. Такая энергосистема обеспечивает эффективное распределение нагрузок, повышение КПД и снижение массо-габаритных показателей. Однако система с единым ГРЩ накладывает ограничения на электромагнитную совместимость и согласование по мощности системы электровдижения и судовой сети. На судне система электродвижения является самым мощным и, следовательно, оказывает наибольшее влияние на судовую сеть. Поэтому проблемы искажения формы кривой тока и скорости изменения нагрузки становится крайне важными.
Режим работы энергетической установки судна определяется характеристикой нагрузки гребного электродвигателя. Требуемая мощность и скорость вращения гребной установки определяется на этапе проектирования, исходя из нагрузочных характеристик привода, приведенных в техническом задании.
Однако данные характеристики отличаются невысокой точностью. Реальная нагрузочная характеристика привода снимается только при проведении ходовых испытаний судна. В приведенных в техническом задании характеристиках не указывается разница нагрузочной характеристики в режимах реверса привода, при движении в ледовых условиях, а также сильные колебания нагрузки во время качки и при маневрировании. Мощность, потребляемая двигателем при движении на номинальных оборотах, может значительно отличаться от предполагаемой в техническом задании.
Переходные процессы, протекающие в энергетической системе судна, зависят от динамических характеристик системы электродвижения [2]. Современные системы судового электропривода выполняются с использованием двухзвенного преобразователя частоты и двигателей переменного тока. Из-за небольшой разницы мощности судовой электростанции и гребной электроустановки, в автономных системах не допустимо значительное искажение кривой формы тока, потребляемой преобразователем частоты. Автономные системы не позволяют строить системы с выпрямительной частью преобразователя, выполненной по схеме Ларионова. Поэтому выпрямительную часть схемы выполняют по 12 пульсной схеме или используют активный выпрямитель.
В современном судовом приводе переменного тока в качестве алгоритма управления чаще всего используется векторный алгоритм управления. Векторный алгоритм обеспечивает приводу хорошие энергетические характеристики [3] и более чем достаточное для привода гребной установки, быстродействие.
Для решения проблемы рассогласования скорости нарастания мощности, потребляемой преобразователем частоты и скорости, с которой дизель-генератор может обеспечить увеличение мощности,
Было произведено математическое моделирования процесса увеличения задания в системах с электродвижением.
Для решения поставленной задачи была построена математическая модель судового электропривода при питании от системы безгранично большой мощности с целью оценки скорости изменения потребляемой мощности. График моделирования мощности, потребляемой приводом системы электродвижения судна приведен на рисунке 2.
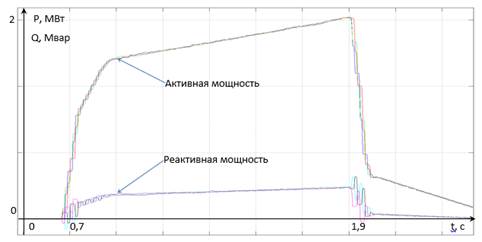
Рисунок 2 График мощности, потребляемой приводом гребной электроустановки
На графике токов, протекающих в статоре (рисунок 3), видно, что при изменении задания частоты вращения ток, потребляемый двигателем, увеличивается почти мгновенно. Энергосистема ограниченной мощности не способна обеспечить такое быстрое увеличение нагрузки, что подтверждается результатами моделирования.

Рисунок 3 График токов статора гребного электродвигателя
На рисунке 4 приведено изменение мощности дизель-генератора при набросе нагрузки. Как видно на графике для набора соответствующей мощности требуется время порядка нескольких секунд. В то время как ток системы электродвижения может возрастать за время на несколько порядков меньшее.

Рисунок 4 График изменения мощности на валу дизеля при увеличении нагрузки
Из-за разной скорости изменения уровня тока частота в сети будет снижаться ниже регламентируемых значений. График изменения частоты при набросе нагрузки сопоставимой по мощности с дизель-генератором приведен на рисунке 5.

Рисунок 5 Частота вращения дизеля при увеличении нагрузки
Как следует из графика, частота в сети при изменении нагрузки снижается ниже 45 Гц на время порядка нескольких секунд, что подтверждается данными полученными на действующем проекте.
Моделирование процесса, описывающего запаздывание скорости нарастания мощности, вырабатываемой дизельгенератором, от скорости нарастания мощности, потребляемой преобразователем частоты, это подтверждает тот факт, что энергосистема ограниченной мощности не способна обеспечить быстрое увеличение нагрузки.
Скорость мощность электроустановка преобразователь
Библиографический список
- 1. Фрид Е. Г., Устройство судна // чебник. - 5-е изд., стереотип: - Л.: Судостроение, 1989. -- 341 с. 2. Момот Б. А., Снижение влияния частотно регулируемого привода переменного тока н а качество электрической энергии в сетях с автономным источником: дис. канд. тех. наук: защищена 15.10.2014/ Момот Борис Александрович. СПб., 2014. 152с. 3. Момот Б. А., Горбик В. С., Сравнение различных схем выпрямления в составе электроприводов переменного тока // Естественные и технические науки. - 2014. - №1. - С. 153-155.
Похожие статьи
-
В воздушном зазоре электрических машин всегда, наряду с основной гармонической составляющей вращающегося магнитного поля, присутствуют гармонические...
-
Известно, что проблема замены старого парка машин новыми, устаревших орудий -- современными -- одна из основных проблем индустрии. Оборудование со...
-
Понятие календарного планирования В условиях оживления и развития отечественной промышленности существенно возрастает интерес к проблемам организации...
-
Задача Джонсона о двух станках Рассмотрим задачу последовательной обработки на двух машинах N различных деталей, если известно время Ai и Bi обработки...
-
Математическая модель синхронного генератора с независимыми фазами
Математическая модель синхронного генератора с независимыми фазами Аннотация: В статье представлена опытная модель генератора с независимой схемой...
-
Потребителями реактивной мощности (РМ) являются все электроприемники, у которых кривая синусоидального тока отстает от кривой синусоидального напряжения...
-
1. Л. В. Михайлова.- М-: ИТЦ МАТИ, 2002. Учебное пособие - С. 14-17. Формирование и оперативное управление производственными системами на базе...
-
Как и каждый достаточно ярко выраженный класс экономико-математических моделей, совокупность моделей календарного планирования обладает рядом...
-
Выбор числа и мощностей силовых трансформаторов - Расчет электрической сети микрорайона в г. Иркутск
Выбрать число и мощность трансформаторов для схем электроснабжения района, представленных на рис. 1.4, рис. 1.6, рис.1.7 и рис. 1.8, с исходными данными...
-
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения,...
-
Термодинамика - наука о взаимопревращениях различных форм энергии и законах этих превращений. Термодинамика базируется только на экспериментально...
-
Математическое моделирование экономических явлений и процессов с целью оптимизации процессов управления - область научно-практической деятельности,...
-
В термодинамике понятие "энтропия" было введено Р. Клаузиусом (1865), который показал, что процесс превращения теплоты в работу следует общей физической...
-
Выделим случай, когда входной сигнал X ( T ) является элементарной функцией 1( T ). Реакцию системы на воздействие 1( T ) можно компактно: [1] Где...
-
Z -преобразование является одним из математических методов, разработанных для анализа и проектирования дискретных систем. Аппарат Z -преобразования...
-
Обеспечение потребителей активной и реактивной мощности Наибольшая суммарная активная мощность, потребляемая в проектируемой сети, составляет: Где -...
-
Как известно, человечество в своем стремительном развитии старается все более расширить сферы своей деятельности, сталкиваясь при этом с множеством новых...
-
К числу приближенных методов оптимизации задач календарного планирования относятся: частичный и направленный перебор, метод Монте-Карло,...
-
Календарный производственный программирование однооперационный Все существующие методы решения задач календарного планирования3 по степени достижения...
-
Изучив основные вопросы, связанные с календарным планированием, подведем итог. Задачи календарного планирования отражают процесс распределения во времени...
-
Уровень науки и техники Надежность средств, с помощью которых человек достигает космоса высокая, но не идеальна. РН -- сложная конструкция, и даже в...
-
С началом пилотируемого освоения космоса возникла задача обеспечения безопасности человека и возвращения его на Землю. Основная опасность грозила...
-
Принцип работы частотного преобразователя. Схема частотного привода - Частотный преобразователь
Переити в каталог продукции: Частотные преобразователи Электроприводы постоянного тока являются очень простыми с точки зрения организации системы...
-
Программное управление Относительно просто может быть сформулирована так называемая задача программного управления. В ней предполагается, что управляющие...
-
Основные сведения о частотно-регулируемом электроприводе - Частотный преобразователь
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости...
-
Система усовершенствованных моделей позволяет удовлетворительно воспроизводить кинетику СО-токсичности ДВС при изменении нагрузки, цикловой подачи...
-
Модель в общем смысле (обобщенная модель) есть создаваемый с целью получения и (или) хранения информации специфический объект (в форме мысленного образа,...
-
Решение задачи графическим методом - Математическое моделирование в менеджменте и маркетинге
Необходимо найти максимальное значение целевой функции L(x)= 2x1+2x2 > max, при системе ограничений: 6x1+8x2?48, (1) 8x1+11x2?88, (2)...
-
Заключение, Список использованной литературы - Моделирование математической модели теплообменника
В данной курсовой работе была получена математическая модель теплообменника в виде дифференциальных уравнений. Также была получена передаточная функция...
-
1. Универсальность - характеризует полноту отображения моделью изучаемых свойств реального объекта. 2. Адекватность - способность отражать нужные...
-
В инженерной практике в настоящее время широко используются современные программные комплексы позволяющие моделировать сложные физические процессы. Для...
-
Уравнение динамики теплообменника: Передаточные функции объекта получим по его уравнению динамики. Для этого запишем уравнение по заданному каналу. Затем...
-
Ответ: В педагогических исследованиях прикладная направленность математики, понимается как содержательная и методическая связь курса математики с...
-
Проникновение математики в экономическую науку связано с преодолением значительных трудностей. В этом отчасти была "по-винна" математика, развивающаяся...
-
Задание. Рассматривается вычислительная система состоящая из n вычислительных машин. Имеется n задач. Задана матрица T определяющая время решения i-й...
-
Компьютерное моделирование является одним из эффективных методов изучения сложных систем. Компьютерные модели проще и удобнее исследовать в силу их...
-
Рассмотрим случай, когда цена затрачиваемых мероприятий изменяется непрерывно со временем t. Будем предполагать, что строго монотонно убывает со временем...
-
Математическое моделирование - Основы научных исследований
Выше уже указывалось, что Математическое моделирование - это получение решений уравнений, составляющих математическую модель объекта, при изменении...
-
Контроллер представляет собой микропроцессорную систему управления. Контроллер выполняет следующие функции: Контроль тока и напряжения в 3х фазной сети,...
-
Выбор математической формы функции при моделировании зависимости выпуска продукции от производственных факторов Постановка проблемы. Одним из важнейших...
Математическое моделирование процесса запаздывания нарастания мощности автономного источника энергии от мощности потребителя