Основные понятия МКЭ - Разработка ячейки вычислительного модуля на базе мультиядерного микропроцессора цифровой обработки
Исходным объектом для применения МЮ является материальное тело (в общем случае - область, занимаемая сплошной средой или полем), которое разбивается на части - конечные элементы (КЭ) (рис. 1.1). В результате разбивки создается сетка из границ элементов. Точки пересечения этих границ образуют узлы. На границах и внутри элементов могут быть созданы дополнительные узловые точки. Ансамбль из всех конечных элементов и узлов является основной конечно-элементной моделью деформируемого тела. Дискретная модель должна максимально полно покрывать область исследуемого объекта.
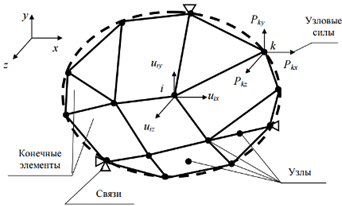
Рис. 1.1 Разбитие тела на конечные элементы
Выбор типа, формы и размера конечного элемента зависит от формы тела и вида напряженно-деформированного состояния. Стержневой КЭ применяется для моделирования одноосного напряженного состояния при растяжении (сжатии), а также в задачах о кручении или изгибе. Плоский двумерный КЭ в виде, например, треугольной или четырехугольной пластины используется для моделирования плоского напряженного или плоского деформированного состояния. Объемный трехмерный КЭ в виде, например, тетраэдра, шестигранника или призмы служит для анализа объемного напряженного состояния. КЭ в форме кольца применяется в случае осесимметричного напряженного состояния. Для расчета изгиба пластины берется соответствующий плоский КЭ, а для расчета оболочки используется оболочечный КЭ или также изгибаемый плоский элемент. В тех зонах деформируемого тела, где ожидаются большие градиенты напряжений, нужно применять более мелкие КЭ или элементы большего порядка [7].
Конечные элементы наделяются различными свойствами, которые задаются с помощью констант и опций. Например, для стержневого ферменного КЭ указывается площадь поперечного сечения, а если моделируется трос, работающий только на растяжение, то назначается соответствующая опция. Для плоских несгибаемых КЭ может указываться толщина и задаваться вид напряженного состояния: плоское напряженное, плоское деформированное или осесимметричное. Для плоских изгибаемых и оболочечных КЭ должна задаваться толщина.
Все элементы и узлы нумеруются. Нумерация узлов бывает общей (глобальной) для всей конечно-элементной модели и местной (локальной) внутри элементов. Нумерацию элементов и общую нумерацию узлов желательно производить так, чтобы трудоемкость вычислений была наименьшей. Существуют алгоритмы оптимизации этой нумерации [8]. Должны быть определены массивы связей между номерами элементов и общими номерами узлов, а также между местными и общими номерами узлов.
Для расчета полей различных физических величин с помощью МКЭ в рассматриваемой области необходимо определить материалы элементов и задать их свойства. В задачах деформирования, прежде всего, нужно указать упругие свойства - модуль упругости и коэффициент Пуассона [9]. Если предполагается пластическое течение, то необходимо задать истинные диаграммы деформирования, которые аппроксимируются билинейными или мультилинейными кривыми. Когда тело неравномерно нагрето, указанные выше механические свойства требуется задать для ряда температур и, кроме того, нужно ввести коэффициент теплового расширения. Для динамических задач необходимо определить плотность материала и, возможно, коэффициент вязкого демпфирования.
В стационарных задачах теплопроводности для выбранного материала тела должен быть задан коэффициент теплопроводности. При нестационарной теплопроводности нужно дополнительно знать плотность материала и его теплоемкость. Если рассматривается нелинейная задача теплопроводности, то указанные физические свойства требуется определять как функции температуры.
Состояние тела характеризуется конечным числом независимых параметров, определенных в узлах конечно-элементной сетки. Такие параметры называются степенями свободы. В рассматриваемых ниже деформационных задачах в качестве степеней свободы применяются перемещения узлов, среди компонентов которых могут быть и угловые перемещения. В задачах теплопроводности степенями свободы являются температуры узлов.
Координаты узлов, перемещения узлов и произвольных точек элементов, силы и другие объекты могут определяться в различных системах отсчета (системах координат). В алгоритме МКЭ используются общая (глобальная) система координат, привязанная ко всей конечно-элементной модели (см. рис. 1.1), и местные (локальные) системы координат, связанные с конкретными конечными элементами, в силу чего их называют элементными системами отсчета. Переход от одной системы отсчета к другой производится с помощью матриц преобразования.
В деформационной задаче число степеней свободы одного узла зависит от типа задачи и от системы отсчета. На рис. 1.1 показан узел i, имеющий в общей системе координат х, у, z три степени свободы, составляющих узловой вектор степеней свободы (перемещений). В общей системе координат этот вектор может быть записан в виде [10]:
(1.1)
Если узел i имеет nI степеней свободы, а конечный элемент включает пЕ узлов, то число степеней свободы одного элемента равно пЕ Ч nI. Число степеней свободы всей модели, имеющей п однотипных узлов равно N=n Ч nI Набор всех степеней свободы модели составляет общий (глобальный) вектор степеней свободы (то есть узловых перемещений модели), в котором нумерация степеней свободы может быть общей (глобальной) или по номерам узлов с добавлением индекса узловой степени свободы
Где {U,} - подматрица, составленная из всех пI, компонентов перемещения узла i. В частности, для трехмерной задачи при использовании общей декартовой системы координат х, у, z эта подматрица является вектором перемещений узла (1.1). Переход от узловой нумерации к общей очевиден. Например, для рассмотренного выше случая трех степеней свободы в узле формулы преобразования имеют следующий вид: uIx = u3i-2, uIy = u3i-1, иIz = u3i.
Для тепловой задачи один узел с глобальным номером i имеет одну степень свободы - температуру ТI. Общий (глобальный) вектор степеней свободы в этом случае имеет вид
Похожие статьи
-
В задаче деформирования после определения глобального вектора степеней свободы {U} находят элементные векторы узловых перемещений {U}E. Через них путем...
-
Конечно-элементный анализ широко применяется при решении задач механики деформируемого твердого тела, теплообмена, гидро - и газодинамики, электро - и...
-
В работе использовались следующее программное обеспечение для решения поставленных задач: AutoCAD, ANSYS Workbench, ANSYS Icepak. Система AutoCAD...
-
Для проверки соответствия требованиям ТЗ, была поставлена задача разработки 3-D модели корпуса Kyocera KD-PB1D79 при помощи системы AutoCAD. В этой части...
-
ANSYS Icepak -- это мощный инструмент для решения задач охлаждения электроники. ANSYS Icepak использует всем хорошо известный встроенный решатель ANSYS...
-
ANSYS - универсальная программная система конечно-элементного (КЭ) анализа, которая на протяжении последних 30 лет является одним из мировых лидеров в...
-
Как отмечалось, основной тенденцией интегральной микроэлектроники является повышение степени интеграции микросхем. Наряду с этим возрастает и...
-
После загрузки ANSYS Workbench будет выведено основное окно программы (рис. 2.9), состоящее в свою очередь из нескольких окон. Каждое из окон может быть...
-
Как показали результаты моделирования, корпус Kyocera KD-PB1D79 полностью отвечает требованиям ТЗ. Устройство работает в заданном диапазоне температур -...
-
Из всех изделий микроэлектроники наибольшее распространение получили интегральные микросхемы. Именно они характеризуют современный уровень развития...
-
В специальной части настоящей работы была поставлена задача исследовать выбранный корпус для микросхемы 4-х процессорной "системы на кристалле" на...
-
На рисунке 2.2 приведено главное окно программы. Интерфейс программы состоит из: Рис. 2.2 Главное окно программы 1. панели быстрого доступа; 2. ленты; 3....
-
В пленочных интегральных микросхемах элементы реализуются в виде пленок различной конфигурации из разных материалов. В зависимости от толщины...
-
Полупроводниковые интегральные микросхемы получили широкое применение в основном из-за массового их использования в вычислительной технике. Все элементы...
-
Корпуса интегральных микросхем должны удовлетворять ряду требований, обеспечивающих их надежную эксплуатацию. Корпус должен обладать достаточной...
-
Тепловое моделирование было проведено в системе ANSYS Icepak. При заданных условиях окружающей среды (температура +40 ОС), температура на корпусе...
-
Workbench - это единая интерактивная среда, интегрирующая различные программные продукты, разрабатываемые ANSYS Inc. как друг с другом, так и с...
-
Объектом исследования является микросхема 4-х процессорной "системы на кристалле" на базе ядер 32-разрядных процессов цифровой обработки сигналов с...
-
В программе присутствуют следующие основные модули: - PlatformManager - DeviceManager - ScenariosManager - ScenarioEngine - ExportManager - ImportManager...
-
Современная электрорадиоаппаратура проходит несколько этапов разработки, в частности: создание концепции продукта, техническая проработка изделия,...
-
Основные понятия баз данных. Цели использования баз данных - Разработка базы данных
В широком смысле слова база данных (БД) - это совокупность сведений о конкретных объектах реального мира в какой-либо предметной области. Для удобной...
-
Теоретические аспекты поставленной задачи В этой части проекта будут объяснены этапы применения МКЭ для плоской фермы. В первой главе было рассмотрено...
-
Проблема безопасности С подключением все большего количества устройств к интернету возникает больше возможных уязвимостей с точки зрения безопасности....
-
Интерфейсы систем управления. Классификация, основные характеристики интерфейсов. Системные (внутримашинные) интерфейсы. Интерфейсы персональных...
-
Система - совокупность разнородных объектов, объединенных для достижения определенной цели. Системы могут различаться по элементам и целям....
-
АРМ - это рабочее место, которое оснащено вычислительной техникой и другими инструментальными средствами, обеспечивающими автоматизацию большей части...
-
Разработка интеграционных платформ началась одновременно с исследованием и развитием Интернета Вещей. Это происходило по той причине, что сама концепция...
-
Основные понятия в системе Ucoz - Разработка Web-сайта предприятия (ООО "Полтава")
Каждый вебмастер вынужден ведать кучу терминов и понятий ради того, чтобы разыскать определенную информацию, программу или просто с целью общаться с...
-
Анализ основных вопросов классификаций распределительных вычислительных систем
Сегодня к распределенным вычислительным системам относят: вычислительные кластеры, SMP - симметричные мультипроцессоры, DSM - системы с распределенной...
-
Домашнее использование чаще всего представляет из себя набор сенсоров, собирающих информацию об индивидах, которые напрямую владеют этой сетью. Это могут...
-
Несмотря на то, что к IoT Hub можно подключиться напрямую, используя протоколы HTTP или AMQP), Microsoft также предоставляет разные SDK для разных языков...
-
С эксплуатационной точки зрения удобно рассматривать то, как устройства в IoT соединяются и "общаются" друг с другом, говоря о технических моделях...
-
Теоретические аспекты СУБД, Основные понятия баз данных - Виды и возможности СУБД
Основные понятия баз данных В настоящее время жизнь человека настолько насыщена различного рода информацией, что для ее обработки требуется создание...
-
Основная терминология сайта - Разработка интернет-магазина компьютерной техники
Аккаунт - учетные данные (имя и пароль), необходимые для использования какого-либо интернет-сервиса. Например, почтовый аккаунт. Браузер - программное...
-
Для выполнения курсовой работы по теме расчета и конфигурации локальной сети на основе технологии Fast Ethernet необходимо предварительно...
-
Понятие KPI "Ключевые показатели эффективности (англ. Key Performance Indicators, KPI) -- показатели деятельности подразделения (предприятия), которые...
-
История и основные парадигмы Следующий виток развития информационных технологий находится вне области настольных компьютеров. В парадигме Интернета Вещей...
-
Разработка концептуальной модели базы данных При проектировании программ выясняются запросы и пожелания клиента и определяется возможный подход к решению...
-
В современной технологии баз данных предполагается, что создание базы данных, ее поддержка и обеспечение доступа пользователей к ней осуществляются...
-
IoT Hub новый сервис, предоставляемый в рамках набора сервисов Azure. Этот сервис предоставляет двустороннее взаимодействие между устройствами и облачной...
Основные понятия МКЭ - Разработка ячейки вычислительного модуля на базе мультиядерного микропроцессора цифровой обработки