Назначение и область применения устройства - Проектирование платы устройства управления вентиляторами компьютера через порт
Высокая плотность размещения элементов ЭВА создает большие трудности при реализации соединений между ними. В этой связи задача размещения элементов на плоскости определяет быстроту и качество трассировки. Оптимальное размещение элементов обеспечивает повышение надежности ЭВА, уменьшение размеров конструктивных единиц, минимизацию взаимных наводок, задержек сигналов, уменьшение общей длины соединений и. т.п.
Формально задача размещения заключается в определении оптимального варианта расположения элементов на плоскости в соответствии с введенным критерием, например с минимальной взвешенной длиной соединений.
В общем виде задача размещения может быть сформулирована следующим образом: в монтажном пространстве задана область, которая разбивается на множество позиций (посадочных мест) P={p1, ..., pq}, число которых должно быть не меньше числа размещаемых элементов. Очевидно, что каждый элемент может занимать не более одного посадочного места, расстояние между которыми описывается симметричной матрицей расстояний D=|di, j|. Имеющееся множество элементов X={x1, x2, ..., xn}, связанных между собой множеством электрических цепей Е={е1, е2, ..., еm}, представлены в виде графа G=(X, E) на рисунке 1. Необходимо таким образом отобразить на множестве P, чтобы обеспечился экстремум целевой функции качества размещения.
E12 E25
E15
E13 E24 E45 E56
E34
E46
Рисунок 1 - граф G
Исходными данными при решении задачи размещения являются прямоугольная конструкция (ячейка, кристалл, панель), число элементов, которое получено в результате компоновки, т. е. разбиение графа схемы на части, и граф схемы соединений элементов или его матричный (списковый) эквивалент. На прямоугольную конструкцию накладывается декартова система координат с осями s и t, определяющая граф Gr, представляющий собой координатную решетку. Расстояние di, j между узлами i и j этого графа описывается выражением:
Di, j=|si-sj|+| ti-tj|
Где si, sj и ti, tj--координаты вершин xi, xj Є X.
Задача размещения сводится теперь к отображению заданного графа схемы
G=(X, Е)
В решетку Gr представленной на рисунке 2, таким образом, чтобы вершины множества X размещались в узлах решетки и, например, суммарная длина были наименьшими для возможных способов отождествления вершин графа и узлов решетки:
Где ci, j--вес ребра.
t
1
0
S
1 2
Рисунок 2 - Отображение графа G в Gr
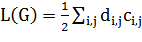
Для подсчета суммарной длины L(G) ребер графа
G=(X, E),
Отображенного в решетку Gr, введем понятие матрицы геометрии Dг.
Матрица геометрии Dг представляет собой часть матрицы расстояний D, в которой исключены элементы di, j, если вершины xi, xj Є X не смежны в графе G.
Для построения матрицы геометрии Dг графа G необходимо каждый элемент матрицы D умножить на соответствующий элемент матрицы смежности R:
Dг=|ri, j, di, j|
Квадратная таблица
R=|ri, j|
Называется матрицей смежности, если ее элементы образуются по правилу
Ri, j=

Алгоритмы квадратичного назначения
Алгоритмы квадратичного назначения основаны на использовании методов нелинейного программирования. Пусть задано множество конструктивных элементов
R=(r1,r2,...,rn)
и множество связей между ними
V=(v1,v2,...,vp),
а также множество установочных мест на плате
T=(t1,t2,...,tk).
Без потери общности будем считать, что n=k. Взаимное расположение элементов на плате можно описать матрицей расстояний D=|df g|, где df g -- расстояние между позициями tf и tg (f, g =1, 2, ...,k). Произвольное размещение конструктивных элементов на позициях множества T представляет собой некоторую перестановку ш, заданную на множестве натуральных чисел
ш={ш(1), ш(2), ..., ш(k)},
где элемент перестановки ш(i) определяет номер позиции, присвоенной ri.
Геометрически в
к2 - мерном пространстве перестановка ш отображается точкой. Каждая точка соответствует матрица ш=|шi j|, в которой
Шi j=
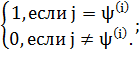
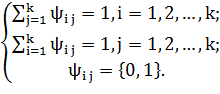
Следовательно, в матрице ш только один элемент в каждой строке и столбце может быть отличен от нуля и равен единице (данный элемент шi j соответствует установке ri и tj), т. е.
C учетом введеных обозначений задача сводится к нахождению такой перестановочной матрицы ш0, которая минимизирует целевую функцию

Т. е к задаче квадратичного назначения.
В настоящее время для ее решения разработано достаточное число точных и приближенных алгоритмов, среди которых наибольшее распространение получили алгоритмы, основанные на методе ветвей и границ. Однако, несмотря на высокую эффективность этого метода, подобные алгоритмы практически неприемлимы уже при k>25 в связи с быстрым возрастанием машинного времени при увеличении k. Для повышения эффективности таких алгоритмов желательно иметь качественное начальное размещение элементов, что позволяет сразу исключить из множества допустимых перестановок большой процент "худших".
К достоинствам этой группы алгоритмов относятся возможность получения глобального экстремума целевой функции, а также наличие типовых программ решения задач квадратичного назначения. Необходимость качественного начального размещения и сравнительно большие затраты машинного времени, не позволяющие решать задачи большой размерности, являются недостатки метода, ограничивающими область его практического применения.
1 Назначение и область применения устройства
Разрабатываемое устройство управления вентиляторами компьютера через порт LPT представляет собой самостоятельное устройство, позволяющее регулировать частоту вращения одного-трех вентиляторов системного блока вручную или автоматически, пользуясь в последнем случае информацией о температуре, формируемой работающей параллельно программой SpeedFan.
К тому же благодаря отдельному расположению непосредственно разрабатываемого устройства оно легко подвергается усовершенствованию и ремонту.
Данное устройство управления вентиляторами компьютера через порт LPT может использоваться в любых компьютерах.
Похожие статьи
-
Принципиальная электрическая схема определяет полный состав элементов и связей между ними и дает детальное представление о принципах работы объекта...
-
Топология ПП представляет собой наглядное изображение проектируемой платы. Топология ПП включает: границы ПП, корпуса РЭК с посадочными местами,...
-
Создание любого электронного устройства включает в себя следующие этапы: - Формирование технического задания (ТЗ) на разработку, определение структуры и...
-
Расширенное техническое задание 1. Наименование изделия: устройство управления вентиляторами компьютера через порт LPT. 2. Назначения: устройство...
-
DipTrace имеет интегрированные библиотеки, которые содержат графическую информацию о символах и типовых корпусах компонентов и текстовую упаковочную...
-
Введение - Проектирование платы устройства управления вентиляторами компьютера через порт
В настоящее время при проектировании радиоэлектронной аппаратуры важную роль приобретает использование систем автоматизированного проектирования (САПР)...
-
После разработки рисунка ПП его необходимо проверить на соответствие исходной принципиальной схеме и соблюдение технологических ограничений. Для это...
-
Осуществить компоновку элементов схемы можно как вручную, так и автоматически. Для запуска автоматического позиционирования элементов необходимо...
-
Домашнее использование чаще всего представляет из себя набор сенсоров, собирающих информацию об индивидах, которые напрямую владеют этой сетью. Это могут...
-
Функционально-структурная организация персонального компьютера. Персональные компьютеры используют в домашних условиях. Их основное назначение:...
-
Редукторы получили широкое распространение во всех отраслях народного хозяйства, поэтому важно их рациональное проектирование. Уменьшение веса...
-
Оперативная память (также оперативное запоминающее устройство, ОЗУ) - в информатике - память, часть системы памяти ЭВМ, в которую процессор может...
-
Устойчивость элементов и устройств к внешним воздействиям. Характеристики климатических воздействий. Механическая прочность. Радиационная стойкость...
-
В процессе выполнения данного курсового проекта были получены уравнения заданных последовательностей сигналов, проведена минимизация полученных в...
-
Материнская плата Материнская плата - это основная плата персонального компьютера. На ней размещаются: * процессор -- основная микросхема, выполняющая...
-
Блок накопителя импульсного входа (Pulse Input Totalizer Block) предоставляет функция накопления расхода, дополняющую блок канала импульсного входа...
-
Применение управления проектами при изучении курса информатики
ПРИМЕНЕНИЕ УПРАВЛЕНИЯ ПРОЕКТАМИ ПРИ ИЗУЧЕНИИ КУРСА ИНФОРМАТИКИ Грызлова М. С. Новикова И. Н. Решение научно-технической и социально-экономической задачи...
-
Структура ПК - Устройство персонального компьютера
А) Основные устройства Из каких же основных элементов состоит современный ПК? Наиболее "весомой" частью любого компьютера является системный блок. Внутри...
-
К основным характеристикам принтеров можно относятся: - ширина каретки, которая обычно соответствую бумажному формату А3 или А4; - скорость печати,...
-
Объекты управления и их свойства - Visual Basic. Основы программирования
Объектом называется некая сущность, которая, во-первых, четко проявляет свое поведение, а во-вторых, является представителем некоторого класса подобных...
-
Области применения ЭС - Теоретические основы информационных технологий
ЭС в задачах интерпретации , как правило, используют информацию от датчиков для описания ситуации. В качестве примера приведем интерпретацию показаний...
-
Какие устройства относятся к манипуляторам? Приведите примеры. - Компьютер и периферийные устройства
К манипуляторам относят устройства, преобразующие движения руки пользователя в управляющую информацию для компьютера. Среди манипуляторов выделяют мыши,...
-
После ввода пользователем исходных данных компьютер должен их обработать в соответствии с заданной программой и вывести результаты в форме, удобной для...
-
Дайте классификацию технических средств ввода информации. - Компьютер и периферийные устройства
Устройства ввода преобразуют информацию в форму понятную машине, после чего компьютер может ее обрабатывать и запоминать. Устройства вывода переводят...
-
Устройство материнской платы Рис. 1 1) Разъем PS/2 - предназначен, для подключения клавиатуры. 2) Разъемы IDE - устаревшие разъемы для подключения...
-
Схема реализации функции А Функция А : Функция сброса: Для реализации функции сигнала А нам потребуется: - 2 элемента И, один с двумя входами, один с...
-
Регистры, Регистры общего назначения - Модельный процессор МП 80386
Регистр является устройством временного хранения данных и используется с целью облегчения арифметических, логических и пересылочных операций. Регистры МП...
-
Для реализации устройства управления потребуются: генератор слов, логические элементы (И, ИЛИ, НЕ), счетчики и логический анализатор. Ниже приведены...
-
Сканер - устройство ввода графических изображений в компьютер. В сканер закладывается лист бумаги с изображением. Устройство считывает его и пересылает...
-
ДФ ИУБиП имеет 3 компьютерных аудитории по 12 персональных компьютеров в каждой. Так же имеются компьютеры у проректора института, секретаря, зама...
-
Значение параметра для State, Статуса Выполнения, Команды, метода и свойства метода упомянуты ниже для быстрой ссылки. Таблица 47.1 PUSH блок Функция...
-
В работе возникает необходимость выбора предметной области, в которой будет тестироваться каскадный классификатор. Главными вопросами на данном этапе...
-
Информационно-логические модели данных, Иерархическая модель - Система управления базами данных
Иерархическая модель Иерархическая структура представляет совокупность элементов, связанных между собой по определенным правилам. Графическим способом...
-
Управление дорожным движением осуществляется адаптивной компьютерной системой, которая, измеряя реальные потоки транспорта на дороге, оптимизирует...
-
Запоминающее устройство (ЗУ) на основе регистров процессорной памяти и кэш-памяти процессора - это внутренняя память процессора. Регистры служат...
-
Шина - это кабель, состоящий из множества проводников. По одной группе проводников - шине данных передается обрабатываемая информация, по другой - шине...
-
Клавиатура Сейчас основным широко распространенным устройством ввода информации в компьютер является клавиатура (клавишное устройство). Она реализует...
-
Для проекта предусматривающего наличие большого количества задач, отображение показателей и составление отчетов, ручное ведение проекта не является...
-
Области применения экспертных систем - Экспертные системы
Области применения систем, основанных на знаниях, могут быть сгруппированы в несколько основных классов: медицинская диагностика, контроль и управление,...
-
Определение экспертных систем. Главное достоинство и назначение экспертных систем. Экспертные системы (ЭС)- это яркое и быстро прогрессирующее...
Назначение и область применения устройства - Проектирование платы устройства управления вентиляторами компьютера через порт