Исследование точности спутниковых определений по мере удаления от базовой станции
Исследование точности спутниковых определений по мере удаления от базовой станции
Бурное развитие науки и техники в последние десятилетия позволили создать принципиально новый спутниковый метод определения координат и их приращений. В этом методе для решения задач позиционирования используются подвижные спутники, координаты которых можно вычислить с необходимой точностью на любой момент времени. На смену динамической триангуляции пришла динамическая трилатерация, образующая пространственную систему линейных измерений с дальнейшим вычислением координат определяемых пунктов. На точность такого определения влияет большое количество неучтенных ошибок, осложняя в конечном итоге абсолютное трехмерное координирование. Базовой методикой выполнения геодезических работ на производстве является относительное координирование с использованием сохранившихся пунктов наземной триангуляции и полигонометрии. Методики проводимых определений носят хаотический характер без учета временных и геометрических факторов прохождения спутников и использования различных навигационных систем. Точность геодезических определений во многих случаях не обоснована удаленностью от базовых станций.
Для исследования точности измерения выбран полигон из 5 пунктов ГГС в Ростовской области (см. рис. 1). В качестве базовой станции [1-4] выбран пункт Ленинаван. Объектом исследования является точность измерения расстояния при не благоприятном и благоприятном уровне PDOP [5,6] и разных систем GPS и ГЛОНАСС в статическом режиме работы GPS приемника [7]. Расчеты координат и расстояний произведены в МСК-61, предустановленной в ГНСС приемнике Javad Triumph V. S. Для сравнения использованы значения координат и вычисленные по ним расстояния между пунктами, принятые за истинные [8]. Ниже приведены графики и сводные таблицы, полученные в результате исследования.
Проведя необходимые наблюдения, были получены координаты и расстояния от базовой станции (БС) (пирамида Ленинаван) до 4-х пунктов в благоприятный период PDOP ?3 и не благоприятный период PDOP>3. Все данные с БС и передвижного приемника были скопированы в ПО Justin (программное обеспечение) для обработки. Значения, полученные при расчете координат и расстояний до пунктов при использовании двух систем GPS/ГЛОНАСС гораздо точнее, чем при расчете каждой из них. Для прогнозирования оптимальных условий наблюдения спутникового созвездия и выявления наименьших погрешностей PDOP были проведены наблюдения БС в период 24 часа. На рис. 2 представлены результаты измерений расстояний по мере удаления от базовой станции. Точность расстояний ухудшается от 2 до 12 см по мере удаления от БС.
Спутник станция подвижной
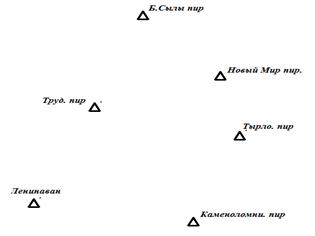
Рис. 1. Схема расположения исследуемых пунктов ГГС
Исследование расстояния от БС до пункта ГГС в благоприятный
|
№ п/п |
Наименование вектора |
Расстояние по каталогу, м |
Исследованная длина вектора, GPS/ГЛОНАСС, м |
Погрешность измерений, GPS/ГЛОНАСС м |
Исследованная длина вектора, GPS, м |
Погрешность измерений GPS, м |
Исследованная длина вектора, ГЛОНАСС, м |
Погрешность измерений ГЛОНАСС, м |
|
1 |
Б. Салы - Ленинаван. |
15703.40 |
15703.3536 |
0.0464 |
15703.2776 |
0.1224 |
15703.3097 |
0.0903 |
|
2 |
Труд - Ленинаван. |
4978.45 |
4978.4166 |
0.0334 |
4978.4116 |
0.0384 |
4978.4287 |
0.0213 |
|
3 |
Новый Мир - Ленинаван. |
8339.90 |
8339.8763 |
0.0237 |
8339.8369 |
0.0631 |
8339.8668 |
0.0332 |
|
4 |
Каменоломни - Ленинаван. |
4131.00 |
4130.9879 |
0.0121 |
4130.9677 |
0.0323 |
4130.9887 |
0.0113 |
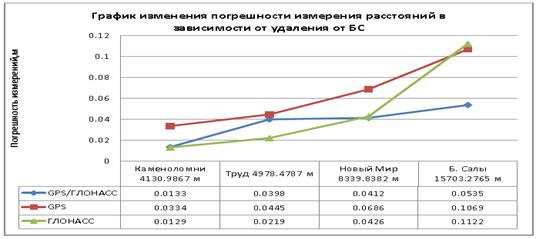
Результаты полученных погрешностей определения расстояний по мере удаления от БС до пунктов ГГС приведены на рис. 2,3 и представлены графически в табл. 1,2.
Исходя из данных графиков и таблиц видно, что погрешности измерений расстояний увеличиваются по мере удаления от БС. Значения PDOP оказывают влияния на точность вычисления расстояний, как в благоприятный период, так и в не благоприятный период наблюдений.
Исследования, выполненные по данной теме, позволяют сформулировать следующие рекомендации, для повышения качества геодезических работ, проводящихся методом спутникового определения координат.
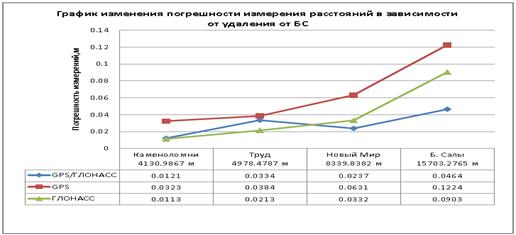
Рис. 2. График изменения погрешности измерения расстояний в зависимости от удаления от БС при PDOP<3.
Таблица №2. Исследование расстояния от БС до пункта ГГС в неблагоприятный период PDOP>3
|
№ п/п |
Наименование вектора |
Расстояние по каталогу, м |
Исследованная длина вектора, GPS/ГЛОНАСС, м |
Погрешность измерений, GPS/ГЛОНАСС м |
Исследованная длина вектора, GPS, м |
Погрешность измерений GPS, м |
Исследованная длина вектора, ГЛОНАСС, м |
Погрешность измерений ГЛОНАСС, м |
|
1 |
Б. Салы - Ленинаван. |
15703.40 |
15703.3465 |
0.0535 |
15703.2931 |
0.1069 |
15703.2878 |
0.1122 |
|
2 |
Труд - Ленинаван. |
4978.45 |
4978.4102 |
0.0398 |
4978.4055 |
0.0445 |
4978.4281 |
0.0219 |
|
3 |
Новый Мир - Ленинаван. |
8339.90 |
8339.8588 |
0.0412 |
8339.8314 |
0.0686 |
8339.8574 |
0.0426 |
|
4 |
Каменоломни - Ленинаван. |
4131.00 |
4130.9867 |
0.0133 |
4130.9666 |
0.0334 |
4130.8710 |
0.0129 |
Спутник станция подвижной
 3" />
3" />
Рис. 3. График изменения погрешности измерения расстояний в зависимости от удаления от БС при PDOP>3.
Для получения более точных координат и расстояний необходимо:
Проводить наблюдения при благоприятных погодных условиях;
Проводить наблюдения более 20 минут (при неблагоприятных погодных условиях);
Проводить наблюдения при минимальных значениях PDOP;
Использовать угол маски отсечения спутников до 10° для повышения точности координат;
Проводить предварительный анализ полученных данных на месте проводимых наблюдений (при выявлении большого количества ошибок провести повторный сеанс наблюдений, либо перенести наблюдения на более благоприятный период);
Наблюдения проводить двухчастотным, двухсистемным ГНСС приемником;
В наблюдениях и расчетах использовать 2 системы GPS/ГЛОНАСС;
Для привязки необходимого объекта в радиусе пятнадцати километров использовать три и более пунктов ГГС.
В данной статье представлены результаты исследований, опирающиеся на измерения GPS приемника одной фирмы. Для полной полноты картины желательно произвести исследование с использованием разных GPS приемников (разных фирм производителей) и последних их модификаций, т. к. на сегодняшний день применяются новые технологии, позволяющие получать координаты с высшей точностью и в разных условиях наблюдения [9,10].
Литература
- 1. Антонович К. М. - Использование СРНС в геодезии. Том 1. Москва ФГУП "Картгеоцентр", 2005. - 340 с. 2. Антонович К. М. - Использование СРНС в геодезии. Том 2. Москва ФГУП "Картгеоцентр", 2006. - 311 с. 3. РТМ 68-14-01 - Спутниковая технология геодезических работ. Термины и определения - 2001. - 15 c. 4. Клюшин Е. Б., Куприянов А. О., Шлапак В. В. Спутниковые методы измерений в геодезии. Ч. 1: Учебное пособие. М.: МИИГАиК, 2006. - 60 с. 5. Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС/GPS. - М.: ЦНИИГАиК, 2003. - 66 с. 6. ОСТ 68-15-01 - Измерения геодезические. Термины и определения - 2001, 19 с. 7. Маркина, Ю. И. Антенна GPS круговой поляризации в диапозоне 1,2-1,6 ГГц // Инженерный вестник Дон", 2012, №3. URL: ivdon. ru/magazine/archive/n3y2012/917. 8. Н. Ф. Добрынин, Т. М. Пимшина Использование космических средств позиционирования при обработке аэро - и космической информации // Инженерный вестник Дона, 2013, №3. URL: ivdon. ru/ru/magazine/archive/n3y2013/1835. 9. G. Seeber, Satellite Geodesy, 2nd completely revised and extended edition Berlin -New York 2003. - p. 612. 10. Anil K. Maini, Varsha Agrawal, Satellite Technology Priciples and applications, 2011. - p. 696
Похожие статьи
-
Назначение и точность плановой геодезической основы Построение геодезической разбивочной основы для строительства следует производить методами...
-
При выборе метода определения площадей обычно руководствуются требуемой точностью, наличием геодезических данных, по границам, размерам и конфигурации...
-
Определение устойчивости территории зон тектонических нарушений методом спутникового нивелирования
В последние годы радикальным образом пересматриваются взгляды по вопросу влияния геодинамических процессов на эксплуатационную надежность зданий и...
-
Обоснование необходимости проведения дополнительных исследований Ранее на исследуемом участке проводилась разведка, в ходе которой было определено, что...
-
Длина запроектированного теодолитного хода ([s]) составляет 595,624 м. Число сторон в ходе 6. Длины сторон хода: Sp1 - T1 = 62,367 м; Т1 - Т2 = 102,663...
-
С помощью масштабной линейки и измерителя на плане произвели необходимые измерения для нахождения площадей: кварталов 11-12-13-14 и Рг, участка 5....
-
Объектом исследования является бассейн реки Клязьма (рис.8). Рис. 8 Районы исследования Рельеф изучаемой территории представлен низменностями и...
-
Объекты исследования Для выбора объекта исследования были изучены картографические материалы, космические снимки с целью нахождения наиболее характерного...
-
Исследование внутригодового распределения стока рек бассейна р. Иле
Исследование внутригодового распределения стока рек бассейна р. Иле Алдиярова А. Е. Асанбеков Б. А. Кайпбаев Е. Т. Внутригодовое распределение стока,...
-
Определение понятия "топография" Топография (др.-греч. - место и - пишу) - научная дисциплина, изучающая методы изображения географических и...
-
Определение Геоцентра из SLR - Определение геоцентра из SLR
Трудности при моделировании негравитационных сил, действующих на спутники, ограничивают возможность методов GPS и DORIS для точного измерения вектора...
-
Научно-техническая проблема восстановления нарушенных территорий охватывает несколько значительных групп задач: сохранение, восстановление и рациональное...
-
В связи с небольшим процентом отбора керна в процессе бурения и его неполным выносом, очень важно значение в изучении разреза скважины ГМИС (каротаж)...
-
Датчик момента токовый ДМТ-321 - Геолого-технологические исследования в процессе бурения
Назначение ДМТ предназначен для преобразования амплитуды переменного тока в цифровой электрический сигнал с гальванической развязкой силовой и...
-
Вибрационный измеритель плотности ВИП-328 - Геолого-технологические исследования в процессе бурения
Назначение ВИП предназначен для измерения плотности жидкости (в том числе, бурового раствора) и передачи результатов измерений в системы сбора ГТИ,...
-
Исследования, связанные с разработкой нефтяных и газовых залежей, следует начинать в первых скважинах, в которых получили притоки нефти и газа. На...
-
Курсовая работа содержит текстовую часть в виде пояснительной записки и графического материала. В соответствии с правилами ГОСТ 2.105-79 текстовая часть...
-
В связи с широким внедрением в практику производства геодезических работ электронных тахеометров изменился сам подход к разбивочным работам, изменяется и...
-
МЕТОДЫ СОЗДАНИЯ ПЛАНОВ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ - Геодезическая сеть
Плановое положение пунктов геодезических сетей создают методами триангуляции, трилатерации, полигонометрии, а также другими методами, в частности, в...
-
Лабораторные исследования - Инженерно-геологические исследования для различных сооружений
Состав, объем, методы и схемы лабораторных определений свойств грунтов и их специфических особенностей необходимо устанавливать с учетом условий работы...
-
Гидрохимические методы при поисках и разведке нефтяных и газовых месторождений могут применяться для решения различных задач и в различных формах....
-
Быстротоком называют искусственное сооружение (русло) с уклоном больше критического (>). 1 - входная часть 2 - лоток быстротока (водоскат) 3 - выходной...
-
Крепость горных пород - характеристика сопротивляемости пород их добыванию - технологическому разрушению. Это понятие крепости введено профессором М. М....
-
Критической глубиной называется глубина, отвечающая минимуму удельной энергии сечения. Уравнение критического состояния потока , (2.10) Где - ускорение...
-
ОПРЕДЕЛЕНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ - Выполнение геодезических измерений
Положения объекта в системе прямоугольных координат можно определить приближенно или с точностью, возможной для карты данного масштаба. Основой для этой...
-
ОПРЕДЕЛЕНИЕ ГЕОГРАФИЧЕСКИХ КООРДИНАТ - Выполнение геодезических измерений
Топографическая карта имеет три рамки: внутреннюю, минутную, оформительскую (внешнюю). Внутренняя рамка каждый лист карты ограничивает с боков (запада и...
-
При бурении скважин и вскрытии ими пластов, содержащих высоконапорную воду, последняя начинает поступать в ствол скважины и оказывать влияние на...
-
Вынос в натуру проектной отметки Задание При перенесении проектной отметки на местность за исходную принять отметку репера, либо среза кола,...
-
Плоские прямоугольные координаты на картах, определение прямоугольных координат на карте, нанесение объектов на карту. Прямоугольные Координаты (плоские)...
-
Пространственные характеристики: площадной объект Временная характеристика - зависимость от времени. Наиболее предпочтительна производить съемку в период...
-
Определение размеров опасной зоны - Разработка месторождений открытым способом
Расстояние, опасное для людей по разлету отдельных кусков породы при взрывании скважинных зарядов: , Где: З- коэффициент заполнения скважины ВВ: З = lЗар...
-
Скважинный акустический телевизор - Геофизические исследования скважин
Рассмотрим данный вопрос на примере акустического телевизора для контроля технического состояния обсадных колонн и внутренней поверхности открытого...
-
Назначение Датчик частоты перемещений магнитный ДПМ-336 предназначен для измерения частоты и общего количества циклических перемещений различных...
-
Датчики момента на роторе - Геолого-технологические исследования в процессе бурения
Для измерения крутящего момента на роторе разработан ряд датчиков, обеспечивающих контроль параметров для различных конструкций приводов ротора буровых...
-
Анализ точности создания геодезической основы при высотном строительстве
Введение Конструкции высотных зданий непрерывно совершенствуются и становятся все более разнообразными. Не менее специфичны и отдельные конструкции и...
-
Расчеты выполняются для ОПВ9 Таблица 4.А.1. Наименование направлений , км , ОПВ9-ПП107 28 30 0,598 2,796389 ОПВ9-Т2 88 00 2,888 0,119896 ОПВ9-ПП110 118...
-
Параметры, регистрируемые в газометрии - Геофизические исследования скважин
Газовый каротаж основан на изучении содержания и состава углеводородных газов и битумов в промывочной жидкости, а также основных параметров,...
-
Диаграмма КС для пласта высокого сопротивления (потенциал-зонд) - Геофизические исследования скважин
При исследованиях скважин методом кажущихся сопротивлений измеряют некоторый параметр, называемый кажущимся удельным сопротивлением (или кажущимся...
-
Неукоснительное соблюдение правил техники безопасности - важнейшее условие успешной работы в полевых условиях. Все виды работ, выполняемые в полевых...
-
Существует три уровня прогноза: 1) Уровень региональных исследований; 2) Уровень зональных исследований; 3) Уровень локальных исследований. Разработаны...
Исследование точности спутниковых определений по мере удаления от базовой станции